You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Cisco Catalyst 6500 Switch ArchitectureDocument115 pagesCisco Catalyst 6500 Switch Architecturepras9000No ratings yet
- Transparently Bridge Two Networks MikrotikDocument7 pagesTransparently Bridge Two Networks Mikrotiksergiov8No ratings yet
- Distributed Trunking CookbookDocument25 pagesDistributed Trunking CookbookJhonatan Ferney Sánchez GarcíaNo ratings yet
- Kaushal Prajapati: Cisco Id: Csco13198439 Visat Circle, SabarmatiDocument3 pagesKaushal Prajapati: Cisco Id: Csco13198439 Visat Circle, Sabarmatikaushal prajapatiNo ratings yet
- CCNP ROUTE Summary PDFDocument161 pagesCCNP ROUTE Summary PDFFarid IzemNo ratings yet
- Computer Network Prelim To MidtermDocument33 pagesComputer Network Prelim To MidtermMary JOy BOrjaNo ratings yet
- SwitchingDocument34 pagesSwitchingHarish PandeyNo ratings yet
- MCQ - 20Document4 pagesMCQ - 20John Philippe MNo ratings yet
- Get Started - Public DNS - Google DevelopersDocument3 pagesGet Started - Public DNS - Google DevelopersparirNo ratings yet
- Restful Web Services: Principles, Patterns, Emerging TechnologiesDocument21 pagesRestful Web Services: Principles, Patterns, Emerging TechnologiesChristian MpambiraNo ratings yet
- Solution Set: CSCI 5132 - Internet ProtocolsDocument2 pagesSolution Set: CSCI 5132 - Internet ProtocolsAli HassanNo ratings yet
- Brouillon Nat StaticDocument24 pagesBrouillon Nat StaticAnonyme10No ratings yet
- Doct 03Document24 pagesDoct 03RuhiNo ratings yet
- Isa-Es16 2.5 Oper - HDBK - Ed05Document560 pagesIsa-Es16 2.5 Oper - HDBK - Ed05BrunoRF100% (1)
- Manual GRE INTERFAZ MIKROTIK CONFIG - Interface - Gre - MikroTik WikiDocument3 pagesManual GRE INTERFAZ MIKROTIK CONFIG - Interface - Gre - MikroTik Wikidannlopezarce5012No ratings yet
- User Guide: IDU R2561 V100R001C00SPC012Document64 pagesUser Guide: IDU R2561 V100R001C00SPC012Maro WelchNo ratings yet
- Discuss The TCP/IP Model Into The World of TCP/IP Networking and Compare It With OSI ModelDocument8 pagesDiscuss The TCP/IP Model Into The World of TCP/IP Networking and Compare It With OSI ModelInnocentNo ratings yet
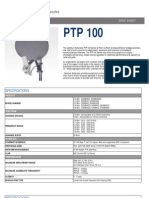
- Cambium Networks PTP 100 SpecificationDocument2 pagesCambium Networks PTP 100 SpecificationMuliawan HenochNo ratings yet
- 1: Ipv6 Addresses Are 128-Bit Hexadecimal Numbers: Private Ipv6 Network Id:-Fd30:5A40:A5Bc:206E::/64Document3 pages1: Ipv6 Addresses Are 128-Bit Hexadecimal Numbers: Private Ipv6 Network Id:-Fd30:5A40:A5Bc:206E::/64ajsurkhiNo ratings yet
- Is There A Mass Market For CDPD: CDPD:emerging of Mobile Network ServiceDocument38 pagesIs There A Mass Market For CDPD: CDPD:emerging of Mobile Network ServicehaileNo ratings yet
- Operatin Sheet 1.1 - NMAP Netwirk Mapper /IP Scanner: Developed by Gordon Lyon FeaturesDocument13 pagesOperatin Sheet 1.1 - NMAP Netwirk Mapper /IP Scanner: Developed by Gordon Lyon Featuresኣስፋ ሙሉNo ratings yet
- Netstat CommDocument2 pagesNetstat CommMirza CerimNo ratings yet
- 3.3.3.4 Lab - Using Wireshark To View Network Traffic - ILMDocument21 pages3.3.3.4 Lab - Using Wireshark To View Network Traffic - ILMMuhammad Rifki75% (4)
- CMTS Operations and Administration Guide R7.2.4.2 08 28 2017 PDFDocument196 pagesCMTS Operations and Administration Guide R7.2.4.2 08 28 2017 PDFSilvio MaciasNo ratings yet
- Peer To Peer (P2P) File SharingDocument15 pagesPeer To Peer (P2P) File SharingPedro OleskoNo ratings yet
- Data-Over-Cable Service Interface Specifications Modular Headend ArchitectureDocument152 pagesData-Over-Cable Service Interface Specifications Modular Headend ArchitectureARUNKUMAR KNo ratings yet
- Script 1wan Modified by Naufal FinalDocument35 pagesScript 1wan Modified by Naufal FinalSundary Rsbt100% (1)
- CT02-021.816.09.04.02 Software InstallDocument44 pagesCT02-021.816.09.04.02 Software InstalljcpereaNo ratings yet
- FTP XXDocument13 pagesFTP XXDaniel MekuryawNo ratings yet
- Adcx V18a LGDocument300 pagesAdcx V18a LGTuPro FessionalNo ratings yet