You might also like
- Kiểm Tra Cuối Kì: Câu 1: Vẽ đồ thị hàm số dùng labview (Document8 pagesKiểm Tra Cuối Kì: Câu 1: Vẽ đồ thị hàm số dùng labview (Trung MaiNo ratings yet
- American University of Science & Technology: Department of Mechatronics EngineeringDocument8 pagesAmerican University of Science & Technology: Department of Mechatronics EngineeringMohmoud Al AbedNo ratings yet
- Project1 1Document18 pagesProject1 1Bharath KumarNo ratings yet
- Real Time Clock With Alarm Option Using AT89S52 and DS1307 ICDocument13 pagesReal Time Clock With Alarm Option Using AT89S52 and DS1307 ICkattaa1993No ratings yet
- Pic Micro Controller Based Led Moving Message DisplayDocument10 pagesPic Micro Controller Based Led Moving Message Displays_k_sahoo100% (2)
- Lab Set IVDocument27 pagesLab Set IVbezawitg2002No ratings yet
- Experiment No 1: 1. Study of Arm Evaluation SystemDocument30 pagesExperiment No 1: 1. Study of Arm Evaluation SystemAshok KumarNo ratings yet
- MC ProgramDocument15 pagesMC Programmohammed raakinNo ratings yet
- Multimeter PIC18Document3 pagesMultimeter PIC18Mai LinhNo ratings yet
- Digital Theromometer Using 8051Document17 pagesDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NNo ratings yet
- Automatic Detecton and Notification of Potholes PDFDocument25 pagesAutomatic Detecton and Notification of Potholes PDFMd Sumair KhanNo ratings yet
- PIRCODEDocument13 pagesPIRCODEJohn Errol MergalNo ratings yet
- Bilet 7 ADocument4 pagesBilet 7 AbiancaNo ratings yet
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- Chuong TrinDocument3 pagesChuong TrinMinh Tiến Bùi HồNo ratings yet
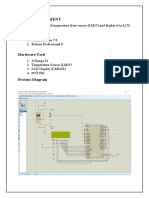
- Aim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDDocument8 pagesAim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDChandra SekharNo ratings yet
- Raport: Universitatea Tehnica A MoldoveiDocument11 pagesRaport: Universitatea Tehnica A MoldoveiReu ConstantinNo ratings yet
- #Define #Include #Include #Include #Include #Include Int Int Int Int Int Int Int Int Int Int Int IntDocument19 pages#Define #Include #Include #Include #Include #Include Int Int Int Int Int Int Int Int Int Int Int IntTrần HiếuNo ratings yet
- EXPERIMENT 9: Interfacing ADC With Sensors: ObjectivesDocument3 pagesEXPERIMENT 9: Interfacing ADC With Sensors: ObjectivesLim Wei XenNo ratings yet
- LPC 2148Document14 pagesLPC 2148Shivanshu GuptaNo ratings yet
- Rtos Course ProjectDocument20 pagesRtos Course Projecthammad choudharyNo ratings yet
- Steps Involved in LPC2148Document8 pagesSteps Involved in LPC2148Ravi RajanNo ratings yet
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- Automatic Power Factor CorrectionDocument29 pagesAutomatic Power Factor CorrectionFuture TechnovationNo ratings yet
- Pic 16 FDocument63 pagesPic 16 FKit Vi Điều Khiển100% (1)
- EST ManualDocument125 pagesEST ManualanandjothimanijothimNo ratings yet
- Engr2105 Lab4Document5 pagesEngr2105 Lab4SUPER AMAZINGNo ratings yet
- Mini Project - 049 - 052 - 053Document7 pagesMini Project - 049 - 052 - 053Shreesh ParteNo ratings yet
- Rtos & Embedded Lab RecordDocument94 pagesRtos & Embedded Lab RecordYuvarajaNo ratings yet
- Temperature Sensor Program CodeDocument6 pagesTemperature Sensor Program CodeJay Ann SaleNo ratings yet
- Gagandeep Singh, Assignment 3.doxcDocument23 pagesGagandeep Singh, Assignment 3.doxcgagandeepsinghgxdNo ratings yet
- Project1 1Document18 pagesProject1 1Bharath KumarNo ratings yet
- ÔN THI CUỐI KỲ MÔN THIẾT KẾ HỆ ĐIỀU KHIỂN VÀ VI ĐIỀU KHIỂNDocument20 pagesÔN THI CUỐI KỲ MÔN THIẾT KẾ HỆ ĐIỀU KHIỂN VÀ VI ĐIỀU KHIỂNBaBuiDinhNo ratings yet
- GPS CodingDocument13 pagesGPS CodinghimanshuNo ratings yet
- Code FinalDocument22 pagesCode FinalKhánh NguyễnNo ratings yet
- Interface LCD and Keypad With 8051 MicroDocument7 pagesInterface LCD and Keypad With 8051 MicroSisay ADNo ratings yet
- ARM Embedded Controller ManualDocument28 pagesARM Embedded Controller ManualGagan NaiduNo ratings yet
- Cycle 3Document9 pagesCycle 3venkat011003No ratings yet
- Group 7 FinalReportDocument27 pagesGroup 7 FinalReportJust4 Shop100% (1)
- Praktek 6 AVR Display Data Pada LCDDocument15 pagesPraktek 6 AVR Display Data Pada LCDKhanif KhafidliNo ratings yet
- Tugas Praktikum MikrokontrollerDocument11 pagesTugas Praktikum MikrokontrollerRizky AbdillahNo ratings yet
- Lcdxultrasonic Lab Act 060106Document7 pagesLcdxultrasonic Lab Act 060106juanzxc acgNo ratings yet
- 1602 Liquid Crystal ExperimentDocument19 pages1602 Liquid Crystal Experimentnouralmoustafa kassasNo ratings yet
- Data Percobaan 1. Mengakses LED Dengan SWITCH A. ProgramDocument9 pagesData Percobaan 1. Mengakses LED Dengan SWITCH A. ProgramSutat MANALOMNo ratings yet
- ProgramsDocument12 pagesProgramsalbertNo ratings yet
- Exp-04Document7 pagesExp-04Prisha SinghaniaNo ratings yet
- LM35Document7 pagesLM35Vũ Đại NghĩaNo ratings yet
- Bapatla Engineering College Dept. of EceDocument9 pagesBapatla Engineering College Dept. of Ecevenkat1115No ratings yet
- Q 1A 5 MarksDocument4 pagesQ 1A 5 MarksYuvraj MohadikarNo ratings yet
- Kelompok 5 Unit 7 MicroControllerDocument14 pagesKelompok 5 Unit 7 MicroControllerHilmi Pramono AdiNo ratings yet
- SPIDocument3 pagesSPIJHOANCEVASTIAN MOLINA LOPEZNo ratings yet
- AUTO3230 Embedded Systems: Staircase Light ProjectDocument13 pagesAUTO3230 Embedded Systems: Staircase Light ProjectKabinad TeshagerNo ratings yet
- Microprocessor and Micro-Controller ProgramsDocument16 pagesMicroprocessor and Micro-Controller ProgramsAkbar AkbarNo ratings yet
- Sankalp IOT FileDocument37 pagesSankalp IOT FileMohit kumarNo ratings yet
- Optrex Im50240 Modificacion 2Document8 pagesOptrex Im50240 Modificacion 2Pedro PerezNo ratings yet
- Programming PIC PeripheralsDocument44 pagesProgramming PIC PeripheralsSreekesh ManipuzhaNo ratings yet
- Experiment 4Document8 pagesExperiment 4Himanshu Rajan jainNo ratings yet
- DS Zadaci PDFDocument23 pagesDS Zadaci PDFArnela Tatic100% (1)
- تقرير الخامسةDocument10 pagesتقرير الخامسةjasmhmyd205No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)