You might also like
- Command Generation For Dynamic Systems1Document237 pagesCommand Generation For Dynamic Systems1Chouaib NemriNo ratings yet
- FuzzyDocument343 pagesFuzzyHardik AgravattNo ratings yet
- Evaluating Fourier Transforms With MATLABDocument11 pagesEvaluating Fourier Transforms With MATLABAhsan Ratyal100% (1)
- MATLAB Course Session 1 Introduction To Modelling and SimulationDocument59 pagesMATLAB Course Session 1 Introduction To Modelling and SimulationMahamod IsmailNo ratings yet
- Seismology: Surface Waves and Earth OscillationsFrom EverandSeismology: Surface Waves and Earth OscillationsBruce BoltNo ratings yet
- Electric FanDocument38 pagesElectric FanKirby Morales67% (3)
- Ansi S2-42 PDFDocument40 pagesAnsi S2-42 PDFAndres Antonio Moreno CastroNo ratings yet
- Pacv D PDFDocument61 pagesPacv D PDFUmen AryanNo ratings yet
- An Introduction to MATLAB® Programming and Numerical Methods for EngineersFrom EverandAn Introduction to MATLAB® Programming and Numerical Methods for EngineersNo ratings yet
- Identification of Dynamic Systems, Theory and FormulationDocument138 pagesIdentification of Dynamic Systems, Theory and FormulationnohaycuentasNo ratings yet
- 10.1007/978 1 4020 9438 5Document380 pages10.1007/978 1 4020 9438 5foamtrailerNo ratings yet
- MATLAB Examples - OptimizationDocument15 pagesMATLAB Examples - OptimizationClayssaNelNo ratings yet
- Taguchi's Design of Experiments and Selection of Orthogonal ArrayDocument22 pagesTaguchi's Design of Experiments and Selection of Orthogonal ArrayBhavin DesaiNo ratings yet
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverNo ratings yet
- S Functions in Matlab R2013Document594 pagesS Functions in Matlab R2013Naveen Gupta100% (1)
- Mechatronic Sensor and Actuator SystemsDocument1 pageMechatronic Sensor and Actuator SystemscakarenesNo ratings yet
- Modal - Identification - IEEE revDE PDFDocument282 pagesModal - Identification - IEEE revDE PDFLuis AntonioNo ratings yet
- Waveform Generation MatlabDocument11 pagesWaveform Generation MatlabArmando CajahuaringaNo ratings yet
- Matlab DFTDocument233 pagesMatlab DFTConavatar BlackNo ratings yet
- 1972 National Linear Integrated Circuits PDFDocument488 pages1972 National Linear Integrated Circuits PDFRodolfo Aramayo GNo ratings yet
- Signal Analysis Using MATLABDocument8 pagesSignal Analysis Using MATLABRajiv ShahNo ratings yet
- NASA Fracture Mechanics Guide PDFDocument6 pagesNASA Fracture Mechanics Guide PDFadsoi asdjioNo ratings yet
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001No ratings yet
- To Be Familiar With An Oscilloscope and AC Waves As Well As Measuring Maximum Value, RMS Value, Time Period and Frequency by Oscilloscope.Document4 pagesTo Be Familiar With An Oscilloscope and AC Waves As Well As Measuring Maximum Value, RMS Value, Time Period and Frequency by Oscilloscope.Hassan MahirNo ratings yet
- Matlab GADocument32 pagesMatlab GASusana De León AldacoNo ratings yet
- Optimization of Welding Process ParameterDocument62 pagesOptimization of Welding Process ParameteraktekshareNo ratings yet
- Complex FiltersDocument14 pagesComplex Filterswrite2arshad_mNo ratings yet
- Fuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportDocument20 pagesFuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportNay Min AungNo ratings yet
- Mitra Ch13 3edDocument9 pagesMitra Ch13 3edMohammad Khairul Halim RimonNo ratings yet
- 3 Matlab AnfisDocument28 pages3 Matlab AnfisThiru Mal JNo ratings yet
- Signal Processing in MatlabDocument39 pagesSignal Processing in MatlabnrameshmeNo ratings yet
- Fundamentals of Mechatronics Short CourseDocument3 pagesFundamentals of Mechatronics Short CourseAamir Hasan KhanNo ratings yet
- Fuzzy LogicDocument47 pagesFuzzy LogicSubhashini jayaseelanNo ratings yet
- Digital Filter MatlabDocument37 pagesDigital Filter MatlabYahya Muhammad AdamNo ratings yet
- Fuzzy NeuralDocument218 pagesFuzzy Neuralapi-3834446100% (5)
- Lifted Newton OptimizationDocument60 pagesLifted Newton OptimizationAndrea SpencerNo ratings yet
- MEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFDocument2 pagesMEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFSathish SatNo ratings yet
- High-Energy Milling: P. Bal A Z, Mechanochemistry in Nanoscience and Minerals Engineering, 103 CDocument30 pagesHigh-Energy Milling: P. Bal A Z, Mechanochemistry in Nanoscience and Minerals Engineering, 103 Cafnaftanel100% (1)
- Optimization (Linear Programming) Using MatlabDocument13 pagesOptimization (Linear Programming) Using Matlabshamsukarim2009100% (1)
- Labview AssignmentDocument70 pagesLabview AssignmentWilliam JonesNo ratings yet
- Genetic Algorithms: and Other Approaches For Similar ApplicationsDocument83 pagesGenetic Algorithms: and Other Approaches For Similar Applicationsnagaraju100% (1)
- Manual Db2latexDocument57 pagesManual Db2latexavalorinsaNo ratings yet
- Tutorial 3: Statistics With MATLABDocument4 pagesTutorial 3: Statistics With MATLABWahyu Joe PradityoNo ratings yet
- Noise PDFDocument35 pagesNoise PDFsudhiprabhuNo ratings yet
- Mutable Vs Immutable Objects in PythonDocument9 pagesMutable Vs Immutable Objects in Pythonsandman21No ratings yet
- Measurement and Instrumentation Engineering NotesDocument12 pagesMeasurement and Instrumentation Engineering Notess_natarajan90No ratings yet
- A Tacholess Order Tracking Methodology Based On A ProbabilisticDocument17 pagesA Tacholess Order Tracking Methodology Based On A ProbabilisticDRISSINo ratings yet
- Optimization Using MatlabDocument23 pagesOptimization Using MatlabDaaft PrickNo ratings yet
- LQR FeedforwardDocument20 pagesLQR Feedforwardsri248No ratings yet
- Final Comb Filter PPT - 2007Document19 pagesFinal Comb Filter PPT - 2007Subrat BarsainyaNo ratings yet
- Vibration Isolation and Force Transmissibility - 6Document50 pagesVibration Isolation and Force Transmissibility - 6Jay PrasathNo ratings yet
- MATLAB Tutorial DocumentDocument182 pagesMATLAB Tutorial DocumentAbhishek KuraviNo ratings yet
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- Solving Problems in Dynamics and Vibrations Using MATLABDocument104 pagesSolving Problems in Dynamics and Vibrations Using MATLABVivek ChauhanNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- An Introduction to Statistical Computing: A Simulation-based ApproachFrom EverandAn Introduction to Statistical Computing: A Simulation-based ApproachNo ratings yet
- How to Design Optimization Algorithms by Applying Natural Behavioral PatternsFrom EverandHow to Design Optimization Algorithms by Applying Natural Behavioral PatternsNo ratings yet
- Sensor Sentina BLG 150 25SSSDocument2 pagesSensor Sentina BLG 150 25SSSsscmaquinasNo ratings yet
- Ul Eu 01025 CPRDocument5 pagesUl Eu 01025 CPRcity chemNo ratings yet
- Stieber TDocument96 pagesStieber Tadem özdilNo ratings yet
- 4 Eq Atomic Structure MsDocument6 pages4 Eq Atomic Structure MsAwais NaeemNo ratings yet
- Respiratory Physiology Lectures 2023Document141 pagesRespiratory Physiology Lectures 2023ZwavhudiNo ratings yet
- SML-CPT 2Document4 pagesSML-CPT 2Lilia BurlacuNo ratings yet
- Detection of The Tetragonal Phase in Atomic LayerDocument6 pagesDetection of The Tetragonal Phase in Atomic LayerAnushri NagNo ratings yet
- LED Light Bulbs Vs CFL Illumination EngineeringDocument5 pagesLED Light Bulbs Vs CFL Illumination EngineeringTanuj KumarNo ratings yet
- CHEM 160 Module 3 Resource 1Document9 pagesCHEM 160 Module 3 Resource 1meyaNo ratings yet
- Ain Shams University - Faculty of Engineering: Tension, Compression, Shear and Flexure Test Reports of Balsa WoodDocument8 pagesAin Shams University - Faculty of Engineering: Tension, Compression, Shear and Flexure Test Reports of Balsa WoodDolzMaGiCz100% (1)
- PM & UcmDocument23 pagesPM & UcmAb HadiNo ratings yet
- Math 2263 - HW1Document2 pagesMath 2263 - HW1cemaliNo ratings yet
- TAN-5000 Series: Buzzer UnitDocument31 pagesTAN-5000 Series: Buzzer UnitpcatruongNo ratings yet
- Passive Noise Control in BuildingsDocument12 pagesPassive Noise Control in BuildingsANJUSREE B.S. MBT18CE025No ratings yet
- Water Into Lake Mass BalanceDocument34 pagesWater Into Lake Mass BalancebrahmishtanNo ratings yet
- Hans Freudenthal - Weeding and Sowing - Preface To A Science of Mathematical Education-D. Reidel Pub. Co (1978)Document324 pagesHans Freudenthal - Weeding and Sowing - Preface To A Science of Mathematical Education-D. Reidel Pub. Co (1978)thanhvuNo ratings yet
- Innova MO-6310 10A Resistance MeterDocument2 pagesInnova MO-6310 10A Resistance MeterindustrialindiaNo ratings yet
- DC30-120 TechVision For Q-Vision Operator Manual - Rev D - ENDocument68 pagesDC30-120 TechVision For Q-Vision Operator Manual - Rev D - ENIngenieria NemoconNo ratings yet
- Spare Parts Catalogue Ersatzteilkatalog Catalogue Pieces Detachees Catalogo Parti Ricambio Catalogo de Piezas de Recambio Catalogo Pecas de ReposicaoDocument13 pagesSpare Parts Catalogue Ersatzteilkatalog Catalogue Pieces Detachees Catalogo Parti Ricambio Catalogo de Piezas de Recambio Catalogo Pecas de ReposicaoClaudio Valencia MarínNo ratings yet
- Report Liquid Detergent BreezeDocument12 pagesReport Liquid Detergent BreezeMicole LimNo ratings yet
- General Knowledge Question and Answers: AnswerDocument250 pagesGeneral Knowledge Question and Answers: AnswerGauravNo ratings yet
- 18M-302C 6362 Answer KeyDocument26 pages18M-302C 6362 Answer KeyharicoolestNo ratings yet
- FR-SX Adjustment ProcedureDocument6 pagesFR-SX Adjustment ProcedureAlexNo ratings yet
- Hydrostatic PressureDocument20 pagesHydrostatic Pressureاحمد صلاح مصطفى ابراهيمNo ratings yet
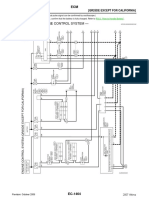
- Wiring Diagram - Engine Control SystemDocument14 pagesWiring Diagram - Engine Control Systempineda87100% (1)
- Spheroid - WikipediaDocument8 pagesSpheroid - Wikipediadenish kumarNo ratings yet
- Lighting SubmittalDocument28 pagesLighting Submittalapi-240147280No ratings yet