You might also like
- m14 Sensibilisation A La Qualite Ge EsaDocument75 pagesm14 Sensibilisation A La Qualite Ge EsaNadia DridiNo ratings yet
- C 04-02 PDFDocument8 pagesC 04-02 PDFkharrat samirNo ratings yet
- Calcul Des Boulons Au CisaillementDocument2 pagesCalcul Des Boulons Au CisaillementNadia DridiNo ratings yet
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- Designation Materiaux v4Document6 pagesDesignation Materiaux v4Hatem LaajiliNo ratings yet
- Position Protection Animale ChasseDocument9 pagesPosition Protection Animale ChasseNadia DridiNo ratings yet
- Tap PDFDocument248 pagesTap PDFNadia DridiNo ratings yet
- Chapitre.3 Partie.1Document38 pagesChapitre.3 Partie.1Nadia DridiNo ratings yet
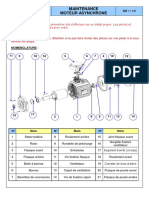
- Démontage Remontage - Maintenance Moteur PDFDocument5 pagesDémontage Remontage - Maintenance Moteur PDFMayor Nfmn100% (2)
- Automobile 1 V 2Document41 pagesAutomobile 1 V 2Nadia DridiNo ratings yet
- Metrologie de BaseDocument8 pagesMetrologie de BaseA. samir86% (7)
- Sujet 1 PDFDocument10 pagesSujet 1 PDFLarbi ElbakkaliNo ratings yet
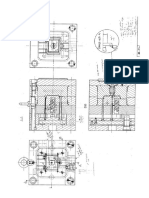
- Plan de MouleDocument1 pagePlan de MouleNadia DridiNo ratings yet
- Caracteristiques Des HuilesDocument9 pagesCaracteristiques Des Huilessl1962100% (1)
- Corrige D Examen MNT PRV 4fDocument3 pagesCorrige D Examen MNT PRV 4fNasserNo ratings yet
- EffetgyroscopiqueDocument22 pagesEffetgyroscopiqueNadia DridiNo ratings yet
- Examen 2013Document4 pagesExamen 2013Brahim MouhcineNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Empreintesv 6Document17 pagesEmpreintesv 6amrNo ratings yet
- Accoudoirv 5Document46 pagesAccoudoirv 5Nadia DridiNo ratings yet
- Moule D'injectionDocument3 pagesMoule D'injectionNadia DridiNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Torsion Act (Banc D'essai)Document4 pagesTorsion Act (Banc D'essai)Nadia DridiNo ratings yet
- Operations Geometriques 2DDocument12 pagesOperations Geometriques 2DNadia DridiNo ratings yet
- Implementation D Un Modele de ComportemeDocument3 pagesImplementation D Un Modele de ComportemeNadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
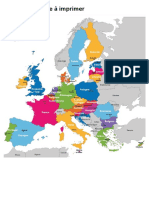
- Carte de L'europe À ImprimerDocument1 pageCarte de L'europe À ImprimerNadia DridiNo ratings yet
- Cluster E.noutaryDocument10 pagesCluster E.noutaryL'Usine Nouvelle100% (3)
- Régulation CompresseurDocument8 pagesRégulation CompresseurtasnimNo ratings yet
- Ds InfoDocument2 pagesDs Infoⵀⴰⵊⴰⵔ ⴰⴱNo ratings yet
- ERERERDocument4 pagesERERERmadmajNo ratings yet
- Synthèse Bibliographique Des Outils D'évaluation Du Ruissellement - Sept2010 - 2Document22 pagesSynthèse Bibliographique Des Outils D'évaluation Du Ruissellement - Sept2010 - 2YASSINNo ratings yet
- Bulletin de Geotechnique Au SenegalDocument7 pagesBulletin de Geotechnique Au SenegalAnonymous 7OG1zANo ratings yet
- Série D'exercices N°2 - Sciences Physiques LA BOBINE ET LE DIPOLE RL - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFDocument5 pagesSérie D'exercices N°2 - Sciences Physiques LA BOBINE ET LE DIPOLE RL - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFMahmoud Essahbi Sahbi DaghsniNo ratings yet
- Methode AgileDocument40 pagesMethode AgilesebtarrisNo ratings yet
- MPLSDocument35 pagesMPLSAziz AbdouNo ratings yet
- L31法文筆記Document8 pagesL31法文筆記YU-WEN WANGNo ratings yet
- Eddy Current Manual Volume 1 V CECCO PDFDocument208 pagesEddy Current Manual Volume 1 V CECCO PDFP BNo ratings yet
- EXP MN SM110 FR R0 Pompes MaintenanceDocument90 pagesEXP MN SM110 FR R0 Pompes MaintenancePrince Rushdie Mongo100% (2)
- Manuel 06 12 F800GS 2016Document166 pagesManuel 06 12 F800GS 2016Alexandros Gi100% (2)
- Barrage en TerredefDocument39 pagesBarrage en TerredefMed ElouartiNo ratings yet
- Catalogue de Prix AuDocument13 pagesCatalogue de Prix AuNarindra Tatiana AnjaNo ratings yet
- NF en 10020Document14 pagesNF en 10020HALINNo ratings yet
- TCP UdpDocument5 pagesTCP UdpOmar AhNo ratings yet
- Les Radiers GenerauxDocument5 pagesLes Radiers GenerauxMyriam KhouryNo ratings yet
- Equipements - CentralesDocument37 pagesEquipements - CentralessamsoumalekingNo ratings yet
- TD7 Corr PDFDocument7 pagesTD7 Corr PDFKhaled MasoudiNo ratings yet
- SVS 800Document2 pagesSVS 800Shouzab AbbasNo ratings yet
- Curriculum Vitae MakamboDocument2 pagesCurriculum Vitae Makambosalomonmakambo01No ratings yet
- Dtu 37-1Document2 pagesDtu 37-1moil69No ratings yet
- Les Entreprises Franc Aises en Chine - Quels EnjeuxDocument4 pagesLes Entreprises Franc Aises en Chine - Quels EnjeuxIslam El OusroutiNo ratings yet
- Suite Chapitre2 Synthèse FiltrageDocument13 pagesSuite Chapitre2 Synthèse Filtrageikram mbrNo ratings yet