You might also like
- Data Communications and Networking (5th Edition) - Behrouz A. Forouzan Ch4Document3 pagesData Communications and Networking (5th Edition) - Behrouz A. Forouzan Ch4Mind MatrixNo ratings yet
- Dijkstras AlgorithmDocument20 pagesDijkstras AlgorithmMahmoud Al-EwiwiNo ratings yet
- PATH FINDING - Dijkstra's Algorithm: Ravikiran Jaliparthi VenkatDocument6 pagesPATH FINDING - Dijkstra's Algorithm: Ravikiran Jaliparthi VenkatMimansha SharmaNo ratings yet
- Sarthak Tomar53 Unit-4 DAADocument9 pagesSarthak Tomar53 Unit-4 DAAHarsh Vardhan HBTUNo ratings yet
- Dijkstras AlgorithmDocument10 pagesDijkstras Algorithmpriyanshushawarn8183No ratings yet
- Dijkstra'S Algorithm: Jnandeep Dev Sarma 15/413Document11 pagesDijkstra'S Algorithm: Jnandeep Dev Sarma 15/413Jeng DevNo ratings yet
- PATH FINDING - Dijkstra's and A Algorithm'sDocument15 pagesPATH FINDING - Dijkstra's and A Algorithm'sMarisol Triple SNo ratings yet
- Shortest Path PDFDocument27 pagesShortest Path PDFLeena KiranNo ratings yet
- 24 ShortestPathAlgorithm-091Document12 pages24 ShortestPathAlgorithm-091Samia MahbubNo ratings yet
- Subtask2: A Maze Simulation: 1 Problem StatementDocument3 pagesSubtask2: A Maze Simulation: 1 Problem StatementAkash SuryawanshiNo ratings yet
- DijkstraDocument4 pagesDijkstraLiana AndronescuNo ratings yet
- Lect05 Graph Shortest PathDocument7 pagesLect05 Graph Shortest PathAnthony-Dimitri ANo ratings yet
- Dijkestra Algorithm PPT L-20Document19 pagesDijkestra Algorithm PPT L-20Saket AnandNo ratings yet
- Competitive Programming: Shortest PathsDocument6 pagesCompetitive Programming: Shortest PathsMudit KumarNo ratings yet
- The Shortest Path Between Two Nodes AMD Algorithm: School of Computers and Information EngineeringDocument20 pagesThe Shortest Path Between Two Nodes AMD Algorithm: School of Computers and Information EngineeringMalika SadullaevaNo ratings yet
- CS502 - Fundamentals of Algorithms Student ID: MC120402396 Assignment 4 AnswerDocument2 pagesCS502 - Fundamentals of Algorithms Student ID: MC120402396 Assignment 4 Answeralisalman1No ratings yet
- A Study On Contrast and Comparison Between Bellman-Ford Algorithm and Dijkstras AlgorithmsDocument6 pagesA Study On Contrast and Comparison Between Bellman-Ford Algorithm and Dijkstras Algorithmsradin1No ratings yet
- Dijkstra's Algorithm Lab ReportDocument6 pagesDijkstra's Algorithm Lab Reportpixaho2996No ratings yet
- Weighted Graphs and Dijkstra's AlgorithmDocument18 pagesWeighted Graphs and Dijkstra's AlgorithmrakeshjainrulzNo ratings yet
- Dijkastra AlgoDocument8 pagesDijkastra Algobeniwalaman1708No ratings yet
- 1 Hw6 SolutionsDocument8 pages1 Hw6 SolutionsdavejaiNo ratings yet
- Graph Theory Assignment 4Document5 pagesGraph Theory Assignment 4gixiNo ratings yet
- Dijkstra ShortPathDocument29 pagesDijkstra ShortPathI - CoderNo ratings yet
- Weighted Graphs and Dijkstra's AlgorithmDocument18 pagesWeighted Graphs and Dijkstra's AlgorithmrakeshjainrulzNo ratings yet
- Presentation 1Document6 pagesPresentation 1Zaneeq RajpootNo ratings yet
- Bellman-Ford Algorithm - DP-23: Recommended: Please Solve It On "PRACTICE " First, Before Moving On To The SolutionDocument3 pagesBellman-Ford Algorithm - DP-23: Recommended: Please Solve It On "PRACTICE " First, Before Moving On To The SolutionPrashant KulkarniNo ratings yet
- On The Optimization of Dijkstra's AlgorithmDocument5 pagesOn The Optimization of Dijkstra's AlgorithmKimlong NguyenNo ratings yet
- Shortest Path Dijkstra AlgorithmDocument9 pagesShortest Path Dijkstra AlgorithmJC CarpioNo ratings yet
- Daa TheoryDocument23 pagesDaa TheoryPrïñçê KūmârNo ratings yet
- Shortest Path AlgorithmsDocument26 pagesShortest Path AlgorithmsZryan MuhammedNo ratings yet
- Dijkstra's Shortest Path Algorithm: Outline of This LectureDocument30 pagesDijkstra's Shortest Path Algorithm: Outline of This LectureHIRAN KUMAR SINHANo ratings yet
- Assignment: Advance Routing and Protocol Topics: 1) Dijkstra'S Algorithm 2) Spanning Tree 3) Shortest PathDocument7 pagesAssignment: Advance Routing and Protocol Topics: 1) Dijkstra'S Algorithm 2) Spanning Tree 3) Shortest Pathmirubaig6781No ratings yet
- Single-Source Shortest Paths (Ch. 24) Single-Source Shortest PathsDocument5 pagesSingle-Source Shortest Paths (Ch. 24) Single-Source Shortest PathsSharadakle CkleNo ratings yet
- DijikstraDocument23 pagesDijikstraKISHORE ANTHONYNo ratings yet
- Bellman Ford AlgorithmDocument4 pagesBellman Ford Algorithmkamini89saiNo ratings yet
- Computer Science and Engineering: Course Title: Algorithms LabDocument9 pagesComputer Science and Engineering: Course Title: Algorithms Labpubji gamerNo ratings yet
- Algorithms Lab Ex 7Document5 pagesAlgorithms Lab Ex 7pixaho2996No ratings yet
- Applications of Graph Theory in Computer SciencesDocument15 pagesApplications of Graph Theory in Computer Sciencesvidula100% (1)
- Lectures On Graph SeriesDocument50 pagesLectures On Graph SeriesShivam PandeyNo ratings yet
- Unit-4: Graph ColoringDocument17 pagesUnit-4: Graph ColoringRamakant UpadhyayNo ratings yet
- Shortest Path Algorithms: 8.1.1 ProblemDocument14 pagesShortest Path Algorithms: 8.1.1 ProblemAndjel PetrovicNo ratings yet
- Shortest Path Problem Is A Problem of Finding TheDocument15 pagesShortest Path Problem Is A Problem of Finding TheHemalatha SivakumarNo ratings yet
- Week 12 SlidesDocument12 pagesWeek 12 SlidesMeow SingNo ratings yet
- GraphsDocument6 pagesGraphsزهرة النرجسNo ratings yet
- Scribe 11Document6 pagesScribe 11omrajani05No ratings yet
- Design and Analysis of Algorithms (COM336) : Dijkstra's AlgorithmDocument3 pagesDesign and Analysis of Algorithms (COM336) : Dijkstra's AlgorithmffNo ratings yet
- Unweighted Shortest Paths Unweighted Shortest Paths Dijkstra's AlgorithmDocument17 pagesUnweighted Shortest Paths Unweighted Shortest Paths Dijkstra's Algorithmilia360No ratings yet
- Ijkstra S Algorithm: by Laksman Veeravagu and Luis BarreraDocument23 pagesIjkstra S Algorithm: by Laksman Veeravagu and Luis BarreraRishabh1405No ratings yet
- BellmanDocument28 pagesBellmanmanju287No ratings yet
- The Floyd-Warshall AlgorithmDocument26 pagesThe Floyd-Warshall AlgorithmSyed Muhammad Junaid HassanNo ratings yet
- Shortest PathDocument20 pagesShortest PathAastha ChauhanNo ratings yet
- Nguyễn Quốc An (BKC18348) - Assignment 3 lần 2 - Discrete Math - C01K10T 1Document7 pagesNguyễn Quốc An (BKC18348) - Assignment 3 lần 2 - Discrete Math - C01K10T 1KatonguyenNo ratings yet
- DSADocument48 pagesDSAfNxNo ratings yet
- Dijkstra's Algorithm:, ... V) and Edge Weights W For An Edge Connecting Vertex V With Vertex V - Let The Source Be VDocument8 pagesDijkstra's Algorithm:, ... V) and Edge Weights W For An Edge Connecting Vertex V With Vertex V - Let The Source Be VAbhishek RoulNo ratings yet
- Ads-Unit V PDFDocument11 pagesAds-Unit V PDFrajasekharv86No ratings yet
- ADas Solution CSE101Document20 pagesADas Solution CSE101Abhishek Varshney100% (5)
- Ass 3Document3 pagesAss 3Rao AfrasiabNo ratings yet
- Dijkstra's AlgorithmDocument7 pagesDijkstra's Algorithmblackcoder41No ratings yet
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Binomial Expansion A (4037)Document9 pagesBinomial Expansion A (4037)fizza khanNo ratings yet
- Problem Set 11Document3 pagesProblem Set 11ke QinNo ratings yet
- 08-3 - Image CompressionDocument33 pages08-3 - Image Compressionmahi271286No ratings yet
- Lecture 3 PDFDocument3 pagesLecture 3 PDFAli MahmoudNo ratings yet
- Line CodingDocument30 pagesLine Codingjohn billy balidioNo ratings yet
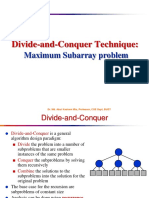
- Divide-and-Conquer Technique:: Maximum Subarray ProblemDocument16 pagesDivide-and-Conquer Technique:: Maximum Subarray ProblemFaria Farhad MimNo ratings yet
- Poster WAMBADocument1 pagePoster WAMBAWAMBANo ratings yet
- Toward Integrating Feature Selection Algorithms For Classification and Clustering-M7s PDFDocument12 pagesToward Integrating Feature Selection Algorithms For Classification and Clustering-M7s PDFulyjohnignacioNo ratings yet
- 15-780: Graduate Artificial Intelligence: Decision TreesDocument41 pages15-780: Graduate Artificial Intelligence: Decision Treesyagagaj137 comNo ratings yet
- NSDE Assignment 5Document2 pagesNSDE Assignment 5dev burmanNo ratings yet
- Association Analysis: Unit-VDocument12 pagesAssociation Analysis: Unit-VPradeepkumar 05No ratings yet
- Lecture 11Document29 pagesLecture 11ahsan puriNo ratings yet
- Introsort ScreenDocument10 pagesIntrosort Screenvivek upadhyay0% (1)
- A Study of Region-Based and Contourbased Image Seg PDFDocument8 pagesA Study of Region-Based and Contourbased Image Seg PDFShrikant TirkiNo ratings yet
- Experiment-3: Convolution: Signals and Systems Lab (EC2P002)Document4 pagesExperiment-3: Convolution: Signals and Systems Lab (EC2P002)GAUTAM BUBNANo ratings yet
- Newton Divided DifferenceDocument8 pagesNewton Divided DifferenceEli AbadiNo ratings yet
- Course Code and Title:: EEE 402: Control SystemsDocument9 pagesCourse Code and Title:: EEE 402: Control SystemsMd. Abu ShayemNo ratings yet
- Mid IDocument5 pagesMid Ivikas donthulaNo ratings yet
- Wavelets and Signal ProcessingDocument193 pagesWavelets and Signal ProcessingAlbeno Saleh AhmadNo ratings yet
- MEVD-104 DIGITAL SIGNAL PROCESSING RGPV Dec-2011Document2 pagesMEVD-104 DIGITAL SIGNAL PROCESSING RGPV Dec-2011Prakash SinhaNo ratings yet
- Complex Variational Mode Decomposition For Signal ProcessingDocument11 pagesComplex Variational Mode Decomposition For Signal Processing0902au11mt14No ratings yet
- The Disjoint Set Class SDocument21 pagesThe Disjoint Set Class SPrabha KrishnanNo ratings yet
- European Journal of Operational Research: Zhipeng Lü, Jin-Kao HaoDocument10 pagesEuropean Journal of Operational Research: Zhipeng Lü, Jin-Kao HaoMr. NobodyNo ratings yet
- Emona SIGEx For NI ELVISDocument4 pagesEmona SIGEx For NI ELVISHa LuuNo ratings yet
- Comparative Analysis of Polynomial Root Finding TechniquesDocument99 pagesComparative Analysis of Polynomial Root Finding TechniquesChanttle CondeNo ratings yet
- Hypo DDDocument4 pagesHypo DDLia SpadaNo ratings yet
- Practical On Artificial Neural Networks: Amrender KumarDocument11 pagesPractical On Artificial Neural Networks: Amrender Kumarnawel dounaneNo ratings yet
- 6 LP - Post Optimal AnalysisDocument28 pages6 LP - Post Optimal AnalysisChakra nayotama amirudinNo ratings yet
- Acquiring Mood Information From Songs in Large Music Database PDFDocument7 pagesAcquiring Mood Information From Songs in Large Music Database PDFPaul HeatchoteNo ratings yet