You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MaintenanceDocument576 pagesMaintenanceALEXANDRU ZANOAGA100% (3)
- Pid LimnotDocument5 pagesPid LimnotMarco MayoraNo ratings yet
- Internet of Things Using Single Board Computers 2022Document301 pagesInternet of Things Using Single Board Computers 2022Pix XxelsNo ratings yet
- Parker - MPP MPJ CatalogDocument24 pagesParker - MPP MPJ CatalogDan QuackenbushNo ratings yet
- Tritex Ii Acordc: Powered ActuatorsDocument52 pagesTritex Ii Acordc: Powered Actuatorsfeliep gonzalezNo ratings yet
- Fundamentals of Numerical Control: Modul 11 MK. CAD/CAM/CAE Dosen: Dr. Ir. Sally Cahyati MTDocument40 pagesFundamentals of Numerical Control: Modul 11 MK. CAD/CAM/CAE Dosen: Dr. Ir. Sally Cahyati MTFajar BahariNo ratings yet
- Arduino Radar ProjectDocument10 pagesArduino Radar ProjectJesus Mamani100% (2)
- Robotics Set of CodesDocument11 pagesRobotics Set of CodesGinsell Mae Tanteo SarteNo ratings yet
- APM Catalogo - ASDA-A2 - 13793531 - 13794392Document72 pagesAPM Catalogo - ASDA-A2 - 13793531 - 13794392Mac AlonsoNo ratings yet
- Oemax CSDJ Um001a en PDocument221 pagesOemax CSDJ Um001a en PPhạm Duy ViễnNo ratings yet
- Mitsubishi Robot Catalog.L (NA) 09051ENG ADocument16 pagesMitsubishi Robot Catalog.L (NA) 09051ENG Ack_peyNo ratings yet
- K1 Servo Drive User Manual V1.5Document199 pagesK1 Servo Drive User Manual V1.5Pinter GroupNo ratings yet
- CNC Milling Machine - FYP Final Report - V1Document57 pagesCNC Milling Machine - FYP Final Report - V1Anas Asif64% (11)
- Yaskawa Sigma-II Servo User ManualDocument498 pagesYaskawa Sigma-II Servo User ManualCarlos_Duque1958No ratings yet
- Servo Motor Control With An ArduinoDocument8 pagesServo Motor Control With An Arduinokedar nannikarNo ratings yet
- Design of An Electronic Governor For A Diesel Generator With Synchronous, Isochronous and Islanded ModesDocument9 pagesDesign of An Electronic Governor For A Diesel Generator With Synchronous, Isochronous and Islanded ModesSaadTahirNo ratings yet
- Servo Distance 2Document2 pagesServo Distance 2Demon (R.G)No ratings yet
- Chap17 SDocument90 pagesChap17 STest GgNo ratings yet
- dmc18 2 SeriesDocument218 pagesdmc18 2 Series加藤恵No ratings yet
- Power PMAC Users ManualDocument862 pagesPower PMAC Users Manualvictorzacherhotmail.comNo ratings yet
- MECAPRO Ang - ADocument99 pagesMECAPRO Ang - ASergei MosolovNo ratings yet
- Technical Data ManualDocument213 pagesTechnical Data ManualKanth KanthanNo ratings yet
- SINUMERIK 840D SL User: System Document Class Title Edition Order Number Deu Eng LanguagesDocument4 pagesSINUMERIK 840D SL User: System Document Class Title Edition Order Number Deu Eng LanguagesVladimirAgeevNo ratings yet
- MultiCam 7000-Series CNC RouterDocument10 pagesMultiCam 7000-Series CNC RouterDaniel AustinNo ratings yet
- DS3 DS3E DS3L ManualDocument148 pagesDS3 DS3E DS3L Manualbui tien boNo ratings yet
- Unimotor Tech DataDocument108 pagesUnimotor Tech DataTheodore GonzalezNo ratings yet
- KS0192 Keyestudio 4WD Bluetooth Multi-Functional Car-1Document151 pagesKS0192 Keyestudio 4WD Bluetooth Multi-Functional Car-1Andres MoranNo ratings yet
- Performance Characteristics of Servo and Stepper MotorsDocument3 pagesPerformance Characteristics of Servo and Stepper MotorsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
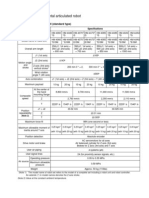
- HM-G Series Horizontal Articulated RobotDocument8 pagesHM-G Series Horizontal Articulated RobotAchinNo ratings yet