You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Schofield1998 - The Mohr-Coulomb Error CorrectionDocument3 pagesSchofield1998 - The Mohr-Coulomb Error CorrectionandresmelodNo ratings yet
- Social Customer Relationship Management (SCRM) - Application and TechnologyDocument9 pagesSocial Customer Relationship Management (SCRM) - Application and TechnologyThu TrangNo ratings yet
- Chapt 22Document9 pagesChapt 22Rebecca EsNo ratings yet
- ABB Surge Protection - PV ApplicationDocument2 pagesABB Surge Protection - PV ApplicationPeter Vas VasNo ratings yet
- E38 Closed Circuit Current TestDocument4 pagesE38 Closed Circuit Current TestCezaryCezasNo ratings yet
- OpenScapeBusiness V1 R2.1.0 Release Note V1.2.10 ExternDocument14 pagesOpenScapeBusiness V1 R2.1.0 Release Note V1.2.10 Externjan2No ratings yet
- C2-Forecasting Demand & SupplyDocument31 pagesC2-Forecasting Demand & SupplyPRITHIVI KUMAR A R 1522554No ratings yet
- Cambridge International Examinations Cambridge International Advanced LevelDocument8 pagesCambridge International Examinations Cambridge International Advanced LevelIlesh DinyaNo ratings yet
- Ebook PDF Consumer Behaviour Asia Pacific Edition by Wayne D Hoyer PDFDocument41 pagesEbook PDF Consumer Behaviour Asia Pacific Edition by Wayne D Hoyer PDFmarvin.tappen826100% (35)
- Installation and Adjustment of 3161 Governor On 3500 Family of Engines (1264)Document23 pagesInstallation and Adjustment of 3161 Governor On 3500 Family of Engines (1264)aliNo ratings yet
- Module 5 Advanced MechanicsDocument60 pagesModule 5 Advanced Mechanicsiknowvictoriassecret49No ratings yet
- DFX8 WebDocument2 pagesDFX8 Websamer8saifNo ratings yet
- Energy and Buildings: F. AsdrubaliDocument9 pagesEnergy and Buildings: F. AsdrubaliBogdan BrieNo ratings yet
- Finite Element Analysis of Suction Penetration Seepage Field of Bucket Foundation Platform With Application To Offshore Oilfield DevelopmentDocument9 pagesFinite Element Analysis of Suction Penetration Seepage Field of Bucket Foundation Platform With Application To Offshore Oilfield DevelopmentRayodcNo ratings yet
- Information TechnologyDocument7 pagesInformation TechnologyDEVANAND ANo ratings yet
- Mr. Para's Case Study-For Mam ZenDocument191 pagesMr. Para's Case Study-For Mam ZenWestly JucoNo ratings yet
- WGS RXS - FTXS15 24lvjuDocument6 pagesWGS RXS - FTXS15 24lvjuRicky ViadorNo ratings yet
- Vmware Esx Server 3.5 Installation Guide: Devoloped By: KalamDocument24 pagesVmware Esx Server 3.5 Installation Guide: Devoloped By: KalamKarimulla KolimiNo ratings yet
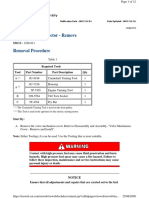
- Electronic Unit Injector - Remove: C6.6 Industrial EngineDocument12 pagesElectronic Unit Injector - Remove: C6.6 Industrial EngineBassieNo ratings yet
- DWDM Equipment-Alcatel 1620Document28 pagesDWDM Equipment-Alcatel 1620Cvenoth Kumar100% (2)
- 2017 - 2022 NEC Strategic PlanDocument44 pages2017 - 2022 NEC Strategic PlanTharindu SamarakoonNo ratings yet
- Financial Statement Analysis at Sangam Dairy: by TurnitinDocument116 pagesFinancial Statement Analysis at Sangam Dairy: by TurnitinHarry SaiNo ratings yet
- 7 How To Build The Super-Parasol Part IDocument6 pages7 How To Build The Super-Parasol Part IkroitorNo ratings yet
- Kotak Mahindra Bank: Presented by Navya.CDocument29 pagesKotak Mahindra Bank: Presented by Navya.CmaheshfbNo ratings yet
- NWPC Annual Report 2014Document56 pagesNWPC Annual Report 2014lupethe3No ratings yet
- Cat-Eht Brake New PDFDocument4 pagesCat-Eht Brake New PDFLingaraj Suresh LingaianNo ratings yet
- Luxury Salon and SpaDocument10 pagesLuxury Salon and Spalucullan studioNo ratings yet
- Using Snap Test Kits Poster enDocument1 pageUsing Snap Test Kits Poster enMoisés RodríguezNo ratings yet
- Constructing The Spatial Weights Matrix Using A Local StatisticDocument15 pagesConstructing The Spatial Weights Matrix Using A Local StatisticbwcastilloNo ratings yet
- Mid Term Asssignment - The Five Senses - PrimaryDocument5 pagesMid Term Asssignment - The Five Senses - PrimaryPrajna MoodabidriNo ratings yet