You might also like
- Difusión-Transferencia de MasasDocument42 pagesDifusión-Transferencia de MasasGabriela G. ChNo ratings yet
- Trabajo Q.a.cualitativa-EjerciciosDocument19 pagesTrabajo Q.a.cualitativa-EjerciciosGabriela G. Ch0% (1)
- Cotizacion de PararrayosDocument1 pageCotizacion de PararrayosEmilio Cardenas ChuNo ratings yet
- Molino SDocument5 pagesMolino SGabriela G. ChNo ratings yet
- Máquinas Eléctricas-Trabajo FinalDocument43 pagesMáquinas Eléctricas-Trabajo FinalGabriela G. ChNo ratings yet
- 1er Trabajo CineticaDocument3 pages1er Trabajo CineticaGabriela G. ChNo ratings yet
- Procesos Electroquimicos DiapositivasDocument12 pagesProcesos Electroquimicos DiapositivasGabriela G. ChNo ratings yet
- Informe de Mecanismo de ReaccionesDocument11 pagesInforme de Mecanismo de ReaccionesGabriela G. ChNo ratings yet
- Procesos Electroquimicos DiapositivasDocument11 pagesProcesos Electroquimicos DiapositivasGabriela G. ChNo ratings yet
- PPMADocument21 pagesPPMAGabriela G. Ch100% (2)
- Descripción Del ProcesoDocument20 pagesDescripción Del ProcesoGabriela G. ChNo ratings yet
- Glicol Presentacion PPDocument26 pagesGlicol Presentacion PPGabriela G. ChNo ratings yet
- Diagrama de BloquesDocument2 pagesDiagrama de BloquesGabriela G. ChNo ratings yet
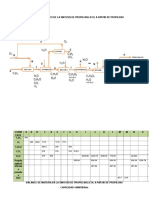
- Balance de Materia Por EquiposDocument8 pagesBalance de Materia Por EquiposGabriela G. ChNo ratings yet
- La Industria Papelera-ExposicionDocument21 pagesLa Industria Papelera-ExposicionGabriela G. ChNo ratings yet
- Televisores Tec de PuntaDocument16 pagesTelevisores Tec de PuntaGabriela G. ChNo ratings yet
- Capitulo IIIDocument8 pagesCapitulo IIIGabriela G. ChNo ratings yet
- Materiales Ceramicos Modernos para Exponer Terry1Document66 pagesMateriales Ceramicos Modernos para Exponer Terry1Gabriela G. Ch100% (1)
- Motor de Corriente AlternaDocument5 pagesMotor de Corriente AlternaGabriela G. ChNo ratings yet
- Difusion Masas.... PPDocument43 pagesDifusion Masas.... PPGabriela G. ChNo ratings yet
- Control de Procesos 1Document6 pagesControl de Procesos 1Gabriela G. ChNo ratings yet
- Difusion Masas.... PPDocument43 pagesDifusion Masas.... PPGabriela G. ChNo ratings yet
- Obtención de TNTDocument2 pagesObtención de TNTGabriela G. ChNo ratings yet
- Aminas Denys MontenegroDocument5 pagesAminas Denys MontenegroGabriela G. ChNo ratings yet
- Control de Procesos 1Document6 pagesControl de Procesos 1Gabriela G. ChNo ratings yet
- Proceso LummusDocument2 pagesProceso LummusGabriela G. ChNo ratings yet
- La Industria Papelera-ExposicionDocument21 pagesLa Industria Papelera-ExposicionGabriela G. ChNo ratings yet
- Fosfatos de Bayovar - Procesos Unitarios 1Document11 pagesFosfatos de Bayovar - Procesos Unitarios 1Gabriela G. ChNo ratings yet
- Exp. PolimerosDocument15 pagesExp. PolimerosGabriela G. ChNo ratings yet
- Exp PolimerosDocument59 pagesExp PolimerosGabriela G. ChNo ratings yet
- Qué Aplicación Tienen Los Circuitos ResonantesDocument5 pagesQué Aplicación Tienen Los Circuitos Resonantesyonis0% (1)
- ElectricidadDocument14 pagesElectricidadHeflin Candia ChuraNo ratings yet
- Split Medidas PresiónDocument13 pagesSplit Medidas PresiónfmjovenelectronicNo ratings yet
- ForoDocument37 pagesForoheidyNo ratings yet
- Ejercicios de Tratamientos Termicos ResueltosDocument10 pagesEjercicios de Tratamientos Termicos ResueltosErik Yantas25% (4)
- Metodologías Agiles Scrum y DevopsDocument13 pagesMetodologías Agiles Scrum y DevopsBani Garcia NavarroNo ratings yet
- Naturaleza de La ContabilidadDocument2 pagesNaturaleza de La ContabilidadLy Carrasco Martinez100% (1)
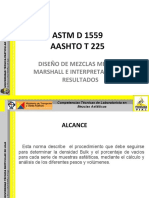
- Astmd15592bn 090602062145 Phpapp02Document25 pagesAstmd15592bn 090602062145 Phpapp02lool llloplloNo ratings yet
- CBC MecanicoautoDocument429 pagesCBC MecanicoautojoseritoNo ratings yet
- Moquetas METODOLOGIADocument239 pagesMoquetas METODOLOGIALG CésarNo ratings yet
- VHDL Implementación de Un ContadorDocument9 pagesVHDL Implementación de Un Contadormam0l1naNo ratings yet
- Bombas LOU IDocument45 pagesBombas LOU ILuis Cesar Gutierrez MedranoNo ratings yet
- Planea y Administra Pequenos NegociosDocument100 pagesPlanea y Administra Pequenos NegociosEunice LezamaNo ratings yet
- Iperc AmbientalDocument30 pagesIperc AmbientalpipeamadorNo ratings yet
- Bandura SituadoDocument5 pagesBandura SituadoAntonio PazosNo ratings yet
- Informe - Final Aceros Al CarbonoDocument55 pagesInforme - Final Aceros Al CarbonoFreddy Rinaldi Mantilla TelloNo ratings yet
- Alvarado Chavez Joel Eliseo: RUC 10762293868 Factura ElectrónicaDocument1 pageAlvarado Chavez Joel Eliseo: RUC 10762293868 Factura ElectrónicaEliseo Alvarado chavezNo ratings yet
- 23.7 MANUAL LIPOLASER ACTUALIZADO (Correjir)Document31 pages23.7 MANUAL LIPOLASER ACTUALIZADO (Correjir)oscar martinezNo ratings yet
- HOJA - VIDA - 1312412198 ActualDocument4 pagesHOJA - VIDA - 1312412198 ActualElvis OchoaNo ratings yet
- Manual de Procedimientos Del Area Psicologica Poligrafica Medico Toxicologica PDFDocument100 pagesManual de Procedimientos Del Area Psicologica Poligrafica Medico Toxicologica PDFIngeniero HernandezNo ratings yet
- Taller Introduccion A Los ComputadoresDocument7 pagesTaller Introduccion A Los ComputadoresCristian RodriguezNo ratings yet
- Catia V6Document4 pagesCatia V6Elvis AsteteNo ratings yet
- Medición de Parámetros y Variables EléctricasDocument39 pagesMedición de Parámetros y Variables EléctricasDavoAlejandro57% (7)
- Caso Practico Unidad 1 Investigación CuantitativaDocument6 pagesCaso Practico Unidad 1 Investigación CuantitativaSandra Milena Velasquez GarciaNo ratings yet
- Trabajo - Practico4 Ejercicios de Esfuerzo EfectivoDocument4 pagesTrabajo - Practico4 Ejercicios de Esfuerzo Efectivorafael romanNo ratings yet
- Seleccion de VentiladorDocument23 pagesSeleccion de Ventiladoryamir_gacoNo ratings yet
- Ejercicios ModeladoDocument16 pagesEjercicios ModeladoKelin VizuNo ratings yet
- Tarifario Ripley Gold MCDocument1 pageTarifario Ripley Gold MCCésar Palomino PeñaNo ratings yet
- Trabajo Marketing Gastronomico ACTDocument16 pagesTrabajo Marketing Gastronomico ACTJosé luis ReyesNo ratings yet