You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Martin Luther King - Simple Past and Present PerfectDocument1 pageMartin Luther King - Simple Past and Present PerfectYeniree GallardoNo ratings yet
- Nilai Rapor IpsDocument16 pagesNilai Rapor IpsRezki FirnandiNo ratings yet
- 8.1 Youth Bulge and Their Role in DemocracyDocument5 pages8.1 Youth Bulge and Their Role in DemocracyArbaz KhanNo ratings yet
- Annual 100% Imported From New York Deli Fundraiser For Gary AckermanDocument1 pageAnnual 100% Imported From New York Deli Fundraiser For Gary AckermanSunlight FoundationNo ratings yet
- Revolution of 1848Document1 pageRevolution of 1848Muhammad FarazNo ratings yet
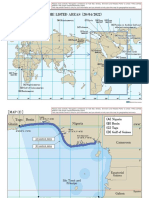
- War Risk Listed Area MapDocument7 pagesWar Risk Listed Area MapshardulshindeNo ratings yet
- Federalism PowerPoint ProjectDocument23 pagesFederalism PowerPoint ProjectViviana TryfonopoulosNo ratings yet
- RETHINKING DEMOCRACY. by Rajni Kothari. London and New YorkDocument2 pagesRETHINKING DEMOCRACY. by Rajni Kothari. London and New YorkAmirNo ratings yet
- Current CV 1Document5 pagesCurrent CV 1api-664136671No ratings yet
- Seat Reserved For Non Muslims in The Provincial Assembly of SindhDocument1 pageSeat Reserved For Non Muslims in The Provincial Assembly of SindhIqbal AnjumNo ratings yet
- Mexico's Cold WarDocument138 pagesMexico's Cold WareisraNo ratings yet
- Change in Political Scenario in IndiaDocument13 pagesChange in Political Scenario in IndiaVanshika MahansariaNo ratings yet
- Jett Rashyhiro C. Derige: Item Price Quantity TotalDocument1 pageJett Rashyhiro C. Derige: Item Price Quantity TotalJett Rashyhiro Cabrera DerigeNo ratings yet
- Water Pollution Control Federation Yearbook: 1973Document204 pagesWater Pollution Control Federation Yearbook: 1973Auren7No ratings yet
- List of Countries by System of GovernmentDocument26 pagesList of Countries by System of GovernmentIsaiah AndreiNo ratings yet
- World War I PowerPointDocument72 pagesWorld War I PowerPointNayeem PatwaryNo ratings yet
- Eighteenth Century Western Travelers OnDocument482 pagesEighteenth Century Western Travelers OnAirinei AdrianaNo ratings yet
- Politics of The Body in Moraga's "Heroes & Saints"Document3 pagesPolitics of The Body in Moraga's "Heroes & Saints"Chango Galván100% (1)
- Lakson Tobacco Company PakistanDocument1 pageLakson Tobacco Company PakistanDanish ZahidNo ratings yet
- New Communication To Parents Using Various Modalities - RPMSModule12Document2 pagesNew Communication To Parents Using Various Modalities - RPMSModule12Gary Fontejon AlteaNo ratings yet
- The Constitution and By-Laws of Jose Rizal University LAW: School Student CouncilDocument11 pagesThe Constitution and By-Laws of Jose Rizal University LAW: School Student CouncilLouie SalazarNo ratings yet
- First Flight MCQSDocument47 pagesFirst Flight MCQSABCNo ratings yet
- Interpol and Drug AbuseDocument4 pagesInterpol and Drug Abuseriyo zakiNo ratings yet
- Pambayang Kolehiyo NG Mauban: College of Education The Contemporary WorldDocument101 pagesPambayang Kolehiyo NG Mauban: College of Education The Contemporary WorldZyrene SardeaNo ratings yet
- Pertemuan Ke 12 Contoh Perhitungan Stabilitas BendungDocument5 pagesPertemuan Ke 12 Contoh Perhitungan Stabilitas Bendungferdian rafa firdausNo ratings yet
- Extra Activity 2A E3 Unit 7ADocument3 pagesExtra Activity 2A E3 Unit 7APyerry MarinhoNo ratings yet
- Soyam Bapu RaoDocument1 pageSoyam Bapu RaoWikibaseNo ratings yet
- Namma Kalvi 10th Tamil Exam Tips 217308Document27 pagesNamma Kalvi 10th Tamil Exam Tips 217308Elijah ChandruNo ratings yet
- Davao City BrgysDocument6 pagesDavao City Brgyssmol adlawan-margateNo ratings yet
- Bronson: Usep MulyadiDocument4 pagesBronson: Usep Mulyadiintan wahyuliNo ratings yet