You might also like
- B Vs C TestDocument7 pagesB Vs C TestSiva Subramaniam M BNo ratings yet
- Imindmap 11Document3 pagesImindmap 11ahmustNo ratings yet
- ADS-B For BeginnersDocument12 pagesADS-B For Beginnersson_gotenNo ratings yet
- Futurelogic GEN2 PSA 66 ST2X Firmware DownloadDocument10 pagesFuturelogic GEN2 PSA 66 ST2X Firmware Downloadenzoln100% (1)
- Advanced Linear ProgrammingDocument209 pagesAdvanced Linear Programmingpraneeth nagasai100% (1)
- Derivation Rule SapDocument3 pagesDerivation Rule SapCA Kiran KoshtiNo ratings yet
- Adu451604 PDFDocument2 pagesAdu451604 PDFAnnBlissNo ratings yet
- Idiots Guide To Big ODocument50 pagesIdiots Guide To Big Omike110*No ratings yet
- Swayam EngDocument34 pagesSwayam EngsriramchaudhuryNo ratings yet
- Artificial IntelligenceDocument39 pagesArtificial IntelligenceSidharth Gaur100% (1)
- Lec 20Document30 pagesLec 20Manoj LadNo ratings yet
- State Space SearchDocument25 pagesState Space SearchHitesh PatelNo ratings yet
- Uniformed SearchDocument37 pagesUniformed SearchAdeoti OladapoNo ratings yet
- Data Structures and Algorithms - One NPTEL LectureDocument6 pagesData Structures and Algorithms - One NPTEL LectureRakeshgangavatiNo ratings yet
- Lec 23Document13 pagesLec 23sixfacerajNo ratings yet
- SearchDocument11 pagesSearchtoysy2020No ratings yet
- Lec 21Document13 pagesLec 21Manoj LadNo ratings yet
- Lesson1Notes PDFDocument32 pagesLesson1Notes PDFMohamed SaidNo ratings yet
- XCONDocument5 pagesXCONGarima Singh100% (1)
- Lec 59Document21 pagesLec 59Elisée NdjabuNo ratings yet
- 2 - 7 - SQL For Data Science - Interpreting Complicated SQL (12-12)Document7 pages2 - 7 - SQL For Data Science - Interpreting Complicated SQL (12-12)RahulsinghooooNo ratings yet
- Lec 6Document19 pagesLec 6kkalani09No ratings yet
- 2nd Largest Element in A Binary Search TreeDocument7 pages2nd Largest Element in A Binary Search TreeAnkit ShahNo ratings yet
- Instructor (Brad Osgood) :on The Air. Oh, What These People Miss Before The CameraDocument12 pagesInstructor (Brad Osgood) :on The Air. Oh, What These People Miss Before The CameraNi PeterNo ratings yet
- Lec1 PDFDocument9 pagesLec1 PDFPradyumna ParsaiNo ratings yet
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 pagesComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNo ratings yet
- Linear ProgrammingDocument209 pagesLinear ProgrammingDuma DumaiNo ratings yet
- Algorithms, Fall 2005. (Massachusetts Institute of Technology: MITDocument14 pagesAlgorithms, Fall 2005. (Massachusetts Institute of Technology: MITankitdocsNo ratings yet
- MM-Visualization Tools For Real-Time Search AlgorithmsDocument45 pagesMM-Visualization Tools For Real-Time Search AlgorithmsLados LudomirNo ratings yet
- Module 1: Real Numbers, Functions and Sequences Lecture 2: Convergent & Bounded Sequences (Section 2.1: Need To Consider Sequences)Document9 pagesModule 1: Real Numbers, Functions and Sequences Lecture 2: Convergent & Bounded Sequences (Section 2.1: Need To Consider Sequences)Avinash GamitNo ratings yet
- Deep LDocument21 pagesDeep LRamsheerNo ratings yet
- Lec 7Document22 pagesLec 7Shubham KatnaNo ratings yet
- Module 1: Real Numbers, Functions and Sequences Lecture 2: Convergent & Bounded Sequences (Section 2.1: Need To Consider Sequences)Document9 pagesModule 1: Real Numbers, Functions and Sequences Lecture 2: Convergent & Bounded Sequences (Section 2.1: Need To Consider Sequences)Narendran KumaravelNo ratings yet
- Lesson 9Document5 pagesLesson 9eduardobNo ratings yet
- Operations On MatricesDocument35 pagesOperations On MatricesK SrinivasNo ratings yet
- UntitledfffDocument40 pagesUntitledfffALVARO MARTIN COLLNo ratings yet
- Finite Element Method Prof. C. S. Upadhyay Indian Institute of Technology, KanpurDocument22 pagesFinite Element Method Prof. C. S. Upadhyay Indian Institute of Technology, KanpurabimanaNo ratings yet
- How R Searches and Finds StuffDocument25 pagesHow R Searches and Finds StuffibinmajedatyahooNo ratings yet
- PHAR265 Analysis 7Document4 pagesPHAR265 Analysis 7Ali RahmaNo ratings yet
- Mitocw - Watch?V Se4P7Ivcune: Ana BellDocument16 pagesMitocw - Watch?V Se4P7Ivcune: Ana BellJosue BeckerNo ratings yet
- Module 2: Limits and Continuity of Functions Lecture 4: Limit at A Point ObjectivesDocument10 pagesModule 2: Limits and Continuity of Functions Lecture 4: Limit at A Point ObjectivesAvinash GamitNo ratings yet
- ANT128 Worksheet 6Document5 pagesANT128 Worksheet 6Alejandro QuezadaNo ratings yet
- Finite Element Method Prof C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument22 pagesFinite Element Method Prof C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaNo ratings yet
- Lec 28Document26 pagesLec 28sangeeyh.84No ratings yet
- Instructor (Andrew NG) :okay. Good Morning. I Just Have One Quick Announcement ofDocument12 pagesInstructor (Andrew NG) :okay. Good Morning. I Just Have One Quick Announcement ofJahangir Alam MithuNo ratings yet
- Lec 12Document14 pagesLec 12heheNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17Document26 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17mahendranNo ratings yet
- Lec 3Document28 pagesLec 3Vinod KSNo ratings yet
- Lec6 PDFDocument23 pagesLec6 PDFKoteswaraRaoBNo ratings yet
- Math Doc 3Document5 pagesMath Doc 3RamosNo ratings yet
- Lec 27Document25 pagesLec 27Elisée NdjabuNo ratings yet
- Finite Element Method Mod-3 Lec-2Document20 pagesFinite Element Method Mod-3 Lec-2PSINGH02No ratings yet
- Ga06 Travelling SalesmanDocument12 pagesGa06 Travelling SalesmanIoachim DipseNo ratings yet
- Lec 1Document9 pagesLec 1teyqqgfnyphcyhwnexNo ratings yet
- Programming in C++ Prof. Partha Pratim Das Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 07 Stack and Its ApplicationsDocument12 pagesProgramming in C++ Prof. Partha Pratim Das Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 07 Stack and Its Applicationsayush guptaNo ratings yet
- 1 Overview: Lecture 2 - February 3, 2005Document6 pages1 Overview: Lecture 2 - February 3, 2005ozturk_nihalNo ratings yet
- Ai Notes - 15-21Document7 pagesAi Notes - 15-21Assoc.Prof, CSE , Vel Tech, ChennaiNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasGirish ReddyNo ratings yet
- Lec 2Document34 pagesLec 2Kamesh Singh JadounNo ratings yet
- hw3 14Document7 pageshw3 14Jiyang XieNo ratings yet
- Lecture 4 PDFDocument10 pagesLecture 4 PDFNarendran KumaravelNo ratings yet
- Automl: Network of Networks - A Neural-Symbolic Approach To Inverse-GraphicsDocument8 pagesAutoml: Network of Networks - A Neural-Symbolic Approach To Inverse-GraphicsJar TesNo ratings yet
- 10.6 Graph Drawing Options (Part 1)Document6 pages10.6 Graph Drawing Options (Part 1)ashishamitav123No ratings yet
- Case Study:: If The Solution To A Problem Is Easy To Check For Correctness, Is The Problem Easy To Solve?Document5 pagesCase Study:: If The Solution To A Problem Is Easy To Check For Correctness, Is The Problem Easy To Solve?arunNo ratings yet
- Classical Physics Prof. V. Balakrishnan Indian Institute of Technology, Madras Lecture No. # 15Document39 pagesClassical Physics Prof. V. Balakrishnan Indian Institute of Technology, Madras Lecture No. # 15Anonymous 8f2veZfNo ratings yet
- Decision-MakingUsingtheAnalyticHierarchyProcessAHPandPJM Melvin AlexanderDocument15 pagesDecision-MakingUsingtheAnalyticHierarchyProcessAHPandPJM Melvin AlexanderRavi TejNo ratings yet
- TCP Acceleration Technology For Cloud Computing: Algorithm, Performance Evaluation in Real NetworkDocument6 pagesTCP Acceleration Technology For Cloud Computing: Algorithm, Performance Evaluation in Real NetworkRavi TejNo ratings yet
- Mutual ExclusionDocument29 pagesMutual ExclusionRavi TejNo ratings yet
- cs188 sp04 mt1 SolDocument3 pagescs188 sp04 mt1 SolRavi TejNo ratings yet
- Bolly MoviesDocument1 pageBolly MoviesRavi TejNo ratings yet
- Demorgan'S Laws and The Biconditional: Philosophy and Logic Sections 2.3, 2.4 ("Some Difficult Combinations")Document51 pagesDemorgan'S Laws and The Biconditional: Philosophy and Logic Sections 2.3, 2.4 ("Some Difficult Combinations")Ravi TejNo ratings yet
- In First Out (LIFO), Service in Random Order (SIRO), Shortest Processing Time (SPT), EtcDocument13 pagesIn First Out (LIFO), Service in Random Order (SIRO), Shortest Processing Time (SPT), EtcRavi TejNo ratings yet
- (I U El1 Pfa) HWCHP PDFDocument6 pages(I U El1 Pfa) HWCHP PDFRavi TejNo ratings yet
- WL WL: Irctcs E Ticketing Service Electronic Reservation Slip (Personal User)Document2 pagesWL WL: Irctcs E Ticketing Service Electronic Reservation Slip (Personal User)Ravi TejNo ratings yet
- PropLogicA271 f09Document27 pagesPropLogicA271 f09Ravi TejNo ratings yet
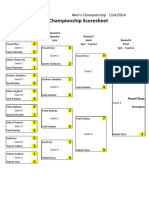
- ChampScores2014Singles PDFDocument1 pageChampScores2014Singles PDFRavi TejNo ratings yet
- Logic Practice AnswersDocument3 pagesLogic Practice AnswersRavi TejNo ratings yet
- Mathcentre Ode PDFDocument2 pagesMathcentre Ode PDFRavi TejNo ratings yet
- Supporting Mobile Cloud Computing in Smart Cities Via Randomized AlgorithmsDocument12 pagesSupporting Mobile Cloud Computing in Smart Cities Via Randomized AlgorithmsRavi TejNo ratings yet
- Mca Jntu-Anantapur SyllabusDocument124 pagesMca Jntu-Anantapur Syllabusyugandhar004No ratings yet
- Clarity PLDT OSS Case Study V2.0Document17 pagesClarity PLDT OSS Case Study V2.0Jessica Angeles67% (3)
- Final Ada Lab ManualDocument62 pagesFinal Ada Lab ManualShivdevNo ratings yet
- Click To Get Netflix Cookies #10Document23 pagesClick To Get Netflix Cookies #10kmkmkmNo ratings yet
- Regulador de Freq RTM876-660 - REALTEKDocument20 pagesRegulador de Freq RTM876-660 - REALTEKAllan Souza SantanaNo ratings yet
- Math 200 3Document2 pagesMath 200 3SamanthaNo ratings yet
- Adobe Photoshop Multiple-Choice Questions (MCQS)Document31 pagesAdobe Photoshop Multiple-Choice Questions (MCQS)Harshal ThakurNo ratings yet
- Modo de Servicio TV LCD ToshibaDocument6 pagesModo de Servicio TV LCD ToshibaSam PabloNo ratings yet
- LBM PDF For Seminar ReportDocument9 pagesLBM PDF For Seminar ReportNaveen GundelliNo ratings yet
- CBNST, 5Document3 pagesCBNST, 5Amit JuyalNo ratings yet
- Full System FlashDocument81 pagesFull System FlashNicolasNärgrath100% (1)
- SM Arfx10 A2eDocument106 pagesSM Arfx10 A2eصلاح هزاعNo ratings yet
- It Audit Report For It CompaniesDocument6 pagesIt Audit Report For It CompaniesDaniel BarbourNo ratings yet
- Hybrid Database System For Big Data Storage and ManagementDocument13 pagesHybrid Database System For Big Data Storage and ManagementBilly BryanNo ratings yet
- Steps Involved in Starting A ComputerDocument2 pagesSteps Involved in Starting A Computersyma masood100% (1)
- Kajian Keandalan Utilitas Bangunan Gedung Rusunawa Di Kota Banda AcehDocument10 pagesKajian Keandalan Utilitas Bangunan Gedung Rusunawa Di Kota Banda AcehUly Ulfa DyahNo ratings yet
- Lab 01Document5 pagesLab 01antfebNo ratings yet
- SMART Freeze Dryer Technology Delivers Robust ROI To R D Labs PDFDocument2 pagesSMART Freeze Dryer Technology Delivers Robust ROI To R D Labs PDFAgdaOliveiraNo ratings yet
- Anna University MBA - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsDocument69 pagesAnna University MBA - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsM.V. TVNo ratings yet
- Troubleshooting VMMDocument119 pagesTroubleshooting VMMCash Sly0% (1)
- HireVue GuideDocument2 pagesHireVue GuideDEEPAK KOCHHARNo ratings yet
- Discrete Mathematics: Alexander Bukharovich New York UniversityDocument16 pagesDiscrete Mathematics: Alexander Bukharovich New York UniversityFlor PoncioNo ratings yet
- asm1-1618- Mai Trần Nguyên KhôiDocument26 pagesasm1-1618- Mai Trần Nguyên KhôiLe Thanh Huy (FGW HCM)No ratings yet