You might also like
- Multiple Choice Questions Numerical MethodsDocument3 pagesMultiple Choice Questions Numerical Methodskim69% (55)
- EMLabScript PartADocument10 pagesEMLabScript PartAAnonymous NiOFQtyINo ratings yet
- Minkowski Sum Boundary Surfaces of 3d-Objects: Graphical Models May 2007Document23 pagesMinkowski Sum Boundary Surfaces of 3d-Objects: Graphical Models May 2007chaoslawfulNo ratings yet
- CheungRault - SampleDocument10 pagesCheungRault - SampleeuclidanNo ratings yet
- Solving System of Volterra-Fredholm Integral Equations With Bernstein Polynomials and Hybrid Bernstein Block-Pulse Functions-2017Document13 pagesSolving System of Volterra-Fredholm Integral Equations With Bernstein Polynomials and Hybrid Bernstein Block-Pulse Functions-2017Julee ShahniNo ratings yet
- Numerical FredholmDocument9 pagesNumerical FredholmPalash KumarNo ratings yet
- Curve and Surface Construction Using Variable Degree Polynomial SplinesDocument28 pagesCurve and Surface Construction Using Variable Degree Polynomial SplinesLayla VuNo ratings yet
- SMP 16-19 Mathematics - Revision Notes Unit 5 - Calculus MethodsDocument2 pagesSMP 16-19 Mathematics - Revision Notes Unit 5 - Calculus MethodsPrincess KimNo ratings yet
- Tugas MTKDocument24 pagesTugas MTKGhalih Hakiki KavisaNo ratings yet
- Question Set 3Document6 pagesQuestion Set 3HectorNo ratings yet
- 002 DcproblemsDocument8 pages002 DcproblemsTayyab UsmanNo ratings yet
- AssingDocument4 pagesAssingPritib Kumar0% (1)
- 2012 CVEN2002 Assign 120730Document5 pages2012 CVEN2002 Assign 120730arpitmatlabNo ratings yet
- Bisection MethodDocument4 pagesBisection MethodKASHFI UDDINNo ratings yet
- Romero Et Al-2019-SN Applied SciencesDocument8 pagesRomero Et Al-2019-SN Applied SciencesIng Victor MendezNo ratings yet
- A Numerical Statistical Solution To The Laplace and Poisson Partial Differential EquationsDocument7 pagesA Numerical Statistical Solution To The Laplace and Poisson Partial Differential EquationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cdmtcs Research SeriesDocument5 pagesCdmtcs Research Seriesasdqwe348No ratings yet
- Problem Set 2Document3 pagesProblem Set 2Kareem Tarek Abou El ReeshNo ratings yet
- Sample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsDocument10 pagesSample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsLuis IvanNo ratings yet
- CH 5Document29 pagesCH 5Web devNo ratings yet
- Software Implementation of Binary BCH Decoder Using MicrocontrollerDocument20 pagesSoftware Implementation of Binary BCH Decoder Using MicrocontrollerAsseel FleihanNo ratings yet
- Ha-Ninh Nguyen 20210709Document11 pagesHa-Ninh Nguyen 20210709Ninh NguyenNo ratings yet
- Fast Floating Point Square Root: Thomas F. Hain, David B. MercerDocument7 pagesFast Floating Point Square Root: Thomas F. Hain, David B. MercerValentina NigaNo ratings yet
- Numarical Metoud Lecture 02Document90 pagesNumarical Metoud Lecture 02alulaNo ratings yet
- Problem by David MountDocument28 pagesProblem by David Mountdineshdash1979No ratings yet
- MCC Esa99 FinalDocument14 pagesMCC Esa99 FinalAdemar CardosoNo ratings yet
- Essential Mathematics For Computational Design 4th Edition - Page 17 To 26Document10 pagesEssential Mathematics For Computational Design 4th Edition - Page 17 To 26dramachinesNo ratings yet
- "The Map Method For Synthesis of Combinational Logic Circuits" Karnaugh, Maurice (November 1953)Document7 pages"The Map Method For Synthesis of Combinational Logic Circuits" Karnaugh, Maurice (November 1953)inExcelsisDeo100% (1)
- Concurrent Application of Genetic Algorithm in Pattern RecognitionDocument10 pagesConcurrent Application of Genetic Algorithm in Pattern RecognitionRoshan BabuNo ratings yet
- π on a computer!), but a piece of paper orDocument79 pagesπ on a computer!), but a piece of paper orNg Chun HiuNo ratings yet
- Assignment 1 EAT216 Sept 2019Document4 pagesAssignment 1 EAT216 Sept 2019ibrahim ibrahimNo ratings yet
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Document7 pagesProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNo ratings yet
- The Unique Symmetric Positive Solutions For Nonlinear Fourth Order Arbitrary Two-Point Boundary Value Problems: A Fixed Point Theory ApproachDocument19 pagesThe Unique Symmetric Positive Solutions For Nonlinear Fourth Order Arbitrary Two-Point Boundary Value Problems: A Fixed Point Theory ApproachMd. AsaduzzamanNo ratings yet
- Introduction To Programming University of SiegenDocument3 pagesIntroduction To Programming University of SiegenHisham SyedNo ratings yet
- Arithmetical Properties of Hypergeometric Bernoulli NumbersDocument8 pagesArithmetical Properties of Hypergeometric Bernoulli NumberskalebNo ratings yet
- Final Exam BFC24203 PDFDocument7 pagesFinal Exam BFC24203 PDFzsNo ratings yet
- 02 ThSci2019.236 - FinalDocument11 pages02 ThSci2019.236 - Finalyasir.nawaz.mathsNo ratings yet
- Seminar ReportDocument12 pagesSeminar ReportFlorinNo ratings yet
- 2 Parametric CurvesDocument10 pages2 Parametric CurvesPhenias ManyashaNo ratings yet
- GaloisDocument8 pagesGaloismcaglar35No ratings yet
- New Technique For Solving Univariate Global OptimizationDocument15 pagesNew Technique For Solving Univariate Global OptimizationsuneethaNo ratings yet
- Three Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlDocument29 pagesThree Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlPankaj SahlotNo ratings yet
- Lecture 12 - QuantizationDocument6 pagesLecture 12 - QuantizationVasco RodriguesNo ratings yet
- Appendix: Discontinuous Galerkin Methods in The Solution of The Convection-Diff Usion EquationDocument5 pagesAppendix: Discontinuous Galerkin Methods in The Solution of The Convection-Diff Usion EquationwearplayNo ratings yet
- American Statistical AssociationDocument8 pagesAmerican Statistical AssociationAnonymous sc79IBC5No ratings yet
- Solutions of Differential Equations in A Bernstein Polynomial BasisDocument9 pagesSolutions of Differential Equations in A Bernstein Polynomial BasisHabib RahmanNo ratings yet
- Penalty Method For Fuzzy Linear Programming With Trapezoidal NumbersDocument8 pagesPenalty Method For Fuzzy Linear Programming With Trapezoidal Numbersad_mih7867No ratings yet
- A Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsDocument11 pagesA Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsAurangZaib LaghariNo ratings yet
- CH 04Document38 pagesCH 04Musarat NazirNo ratings yet
- Assignment 5Document1 pageAssignment 5Sunil kumar KumawatNo ratings yet
- Batch Planning and Resource Allocation - Laboratory 2Document9 pagesBatch Planning and Resource Allocation - Laboratory 2LordTicNo ratings yet
- Parallel Iteration of The Extended Backward Differentiation FormulasDocument19 pagesParallel Iteration of The Extended Backward Differentiation FormulasTimothy DicksonNo ratings yet
- Shish Mba Sams Ibm Varanasi PomDocument3 pagesShish Mba Sams Ibm Varanasi PomShish Choudhary100% (1)
- ISOGAT A 2D Tutorial MATLAB Code For Isogeometric AnalysisDocument12 pagesISOGAT A 2D Tutorial MATLAB Code For Isogeometric AnalysisnetkasiaNo ratings yet
- Homework Assignment # 11: MATH 235 - Mathematical Models in Science and EngineeringDocument5 pagesHomework Assignment # 11: MATH 235 - Mathematical Models in Science and Engineering123chessNo ratings yet
- A Note On The Relationship of Primal and Dual Simplex: SFU-CMPT TR 1998-21Document14 pagesA Note On The Relationship of Primal and Dual Simplex: SFU-CMPT TR 1998-21amitangrauNo ratings yet
- Assignment On Bisection Method GIVEN ON 06/10/2020: ProgramDocument13 pagesAssignment On Bisection Method GIVEN ON 06/10/2020: ProgramRahulNo ratings yet
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Finite Element Solution of Boundary Value Problems: Theory and ComputationFrom EverandFinite Element Solution of Boundary Value Problems: Theory and ComputationNo ratings yet
- LIRF Sid Rnav N-W 2015-09-17Document3 pagesLIRF Sid Rnav N-W 2015-09-17lanzeNo ratings yet
- LIRF Star 16-7-25 2015-09-17Document7 pagesLIRF Star 16-7-25 2015-09-17lanzeNo ratings yet
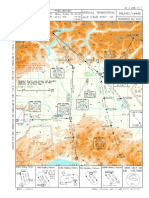
- LIML Star 36 2016-01-07 PDFDocument9 pagesLIML Star 36 2016-01-07 PDFlanzeNo ratings yet
- LIRF Sid E 2015-09-17 PDFDocument7 pagesLIRF Sid E 2015-09-17 PDFlanzeNo ratings yet
- LIRF Star 34 2015-09-17 PDFDocument5 pagesLIRF Star 34 2015-09-17 PDFlanzeNo ratings yet
- LIML Star 18 2016-01-07Document5 pagesLIML Star 18 2016-01-07lanzeNo ratings yet
- LIRF Sid S 2015-09-17Document5 pagesLIRF Sid S 2015-09-17lanzeNo ratings yet
- LIRF Sid N-W 2015-09-17Document3 pagesLIRF Sid N-W 2015-09-17lanzeNo ratings yet
- LIRF Sid E 2015-09-17Document7 pagesLIRF Sid E 2015-09-17lanzeNo ratings yet
- TacRef Falcon 4.0 PDFDocument231 pagesTacRef Falcon 4.0 PDFlanzeNo ratings yet
- LIRF Star 34 2015-09-17Document5 pagesLIRF Star 34 2015-09-17lanzeNo ratings yet
- BMS ManualDocument153 pagesBMS Manualvyper37100% (1)
- LIRF Sid E 2015-09-17Document7 pagesLIRF Sid E 2015-09-17lanzeNo ratings yet
- LIRF Parking 2016-01-07Document3 pagesLIRF Parking 2016-01-07lanzeNo ratings yet
- LIRF Aerodrome 2016-01-07Document1 pageLIRF Aerodrome 2016-01-07lanzeNo ratings yet
- E4262 - P6T Deluxe v3 PDFDocument196 pagesE4262 - P6T Deluxe v3 PDFCalin LuchianNo ratings yet
- LIML Parking Docking Chart-North Apron 2015-09-03Document1 pageLIML Parking Docking Chart-North Apron 2015-09-03lanzeNo ratings yet
- Manuale-Iks Alpha PHDocument18 pagesManuale-Iks Alpha PHlanzeNo ratings yet
- LIML Parking Docking Chart-West Apron 2013-05-02Document1 pageLIML Parking Docking Chart-West Apron 2013-05-02lanzeNo ratings yet
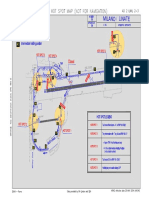
- Liml Hot Spot 2014-05-29Document1 pageLiml Hot Spot 2014-05-29lanzeNo ratings yet
- RAIDiator 5.3 SW Manual - 5sep12Document100 pagesRAIDiator 5.3 SW Manual - 5sep12Ywagar YwagarNo ratings yet
- Tabella IntegraliDocument2 pagesTabella IntegraliLoris FranchiNo ratings yet
- Tavola TrigonometricaDocument1 pageTavola TrigonometricastudentiaristofaneNo ratings yet
- DERIVATEDocument1 pageDERIVATEsabry90No ratings yet