Professional Documents
Culture Documents
Taller Electrico 3 PDF
Uploaded by
Julio Begazo Peña0 ratings0% found this document useful (0 votes)
24 views37 pagesOriginal Title
TALLER ELECTRICO 3.pdf
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
24 views37 pagesTaller Electrico 3 PDF
Uploaded by
Julio Begazo PeñaCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 37
YNIDAD 9
OBJETIVO:
CONTENIDO:
RECURSOS:
HODULO V/Unidad 9
IDENTIFICACION: DE CONEXIONES Y EL NUMERO DE POLOS
DE UN MOTOR TRIFASICO
El objetivo de esta unidad instruir al estu~
Atante pura que identifique las conexiones y el
ndmero de polos en los motores trifésicos.
9.1 Hanera de identifioar la conexién de un motor
triffsico
9.2 Método préctico para determinar el ndmero de
polos en un motor
9.3 Motores trifésicos doble tensién de servicio
9.4 Principio de funcionamiento de nuivies ds
tensiones
9.5 Hotores conectados en estrella / triéngulo
9.6 Repaso de la unided
9.7 Cuestionario
- _ Léminas explicativas
- — Haquetas de motores con diferentes conexio-
nes.
Pégina No.
Como se mencioné anteriormente (ver repobinaje de un motor
come ee ony antes de proceder a la extrecién del devanado de
crieetor trifasico es preciso identificar el tipo de cone”
ign del mismo. Esta cuestién es de suma importancia ¥ re”
Xifere un conociniento previo de los diferentes cases sue
pueden presentarse. Solo si el bobinador u operario encar~
eee de’ ia reparacién tiene en 1a mente los diversos disgre”
gado deuendticos podré llegar con relativa facilidad a1 ob-
jetivo propuesto.
LAs Ses ess ee
A nentro da ne a
en doble dle fos eunteo grupos de ta
bres ivin conectatlos al punto neutro.
46 newteo b>
Hers
. cones aera
te fore 4.0 E vats Wine fe
: E ma
[ at 2
a ©)
Uncle A neuro G neutro Bneutro A neuiro © rewire
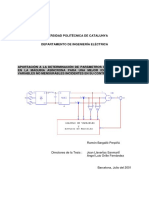
Esquema lineal completo del motor euyo dingrarea 6%
se re Mepreventada en ia figura_—_Los seis terminales
seectades conjuntamente ¥ forman el punto
quem:
Wheres estan ab
fig. 9.1
Para la identificacién de 1a conexién es conveniente obser-
pare arias normas preventivas, que pueden resultar de noto-
ria utilidad.
En primer lugar, no deben‘cortarse terninales ni extraerse
tepkkas del arfollaniento hasta estar seguros, del tipo de
bobinas acti mismo, para ello nos ayudardén los datos de
comet teristicas dei motor en ella esta indicando si el motor
ereide previsto para girar a una o dos velocidades de régi-
ha sido ere vtrabajar a una o dos tensiones de servicio ¢ in-
nom eo shel motor esta conectado en triéngulo o estrella.
Pégina No. 2
MODULO V/Unided 9
heteniendo en la memoria estas caracteristioas particulares
los diagramas esqueméticos descr ited anteriormente, poco
7 fuerzo costaré identificar la conexién en cuestién, bas-
taré para ello proceder como sigue:
1. Se empieza por contar el] # de grupos ® enda hilo de
line 2a, ejemplo en una conexidn estrella, serie 8
line*;i1o, de linea va conectado un grupo. Ko existe
cade na otra clase de conexién de motor que suceda asi,
vea la- figura 9.1
©
{oS
Diagraroa esquemitico de un motor tif
vexion ea evtrella/serie porque a cada
pain 2olo grupo.
Conexién estrella serie
2 bia cada hilo de linea van conectados . sriped: la
oi onion podré ser en triéngulo serie o bien st entre-
cone te’ paraielo cono podemos ver en la figure a.2A
y & respectivamente
Tanto la conexién en tridngulo/serie (izquieria) come
nen estrella/doble paralelo (derecha) tienen I
Maud de presentar dos grupos de bobinas unides a cada lin
mentacién, pero la segunda s¢ igue de la primera porque los
seis grupos tienen un extrema comin.
TRIANGULO SERIE ESTRELLA DOBLE PARALELO
fig. 9.2
para determinar si ge trata de 1a conexién estrelie doris
retiielo se buseard el punto neutro al que vaya conectados
perslelo se pusi no existe el punto neutro entonces 1a com
nezi6n seré en trigéngulo o Delta.
MODUL V/Unidad 8 Pagina No. 3
A veces hay dos puntos neutros
uno; o también puede ser que
estrella doble paralelo como en
hi
tor de Ie fi
42 Y1 con
paralel
re fa
fig. 8.3 Conexién est:
cada hilo
nexién es en estre:
motor que
Conexién en ot
wrella/triple pat 3 Yi. Se
reconoce porque a
slimentacién van unidlos tres grt
pot de bobine
fig. 9.4 Conexién ¢:
Cuatido a enda hilo de 11
motor podré ser: én tr
estrella cued.
in
punto neutro.
ces gerd una con
figura 9.5.
HODULO V/Unidad 8
de linea van conect:
lla triple paralelo, ni
tenga tal conexién, segin se v
iéngulo doble paralelo
ruple paralelo,
ima conexién cuando los 12 grupos van con
De no existir dicho punto
xién doble paralelo, segén se ve en la
separados de 3 grupos cada
el motor este conectado en
la figura 8.3.
a 4.7 pero eomnetaslo en
wale punto neutra. Le ten
y neutre ex de 230 V,
ie Ver > 23008
rella doble paralelo
ados 3 grupos la co-
0 hay otro tipo
een la fi-
trella triple paralelo
van conectados 4 grupos, el
© bien en
identificéndose esta G1-
ectados en e)
neutro enton-
Pégina No. 4
uo
9.2
Aton «bods
eee
TRIANGULO DOBLE PARALELO ESTRELLA CUADKUPLE PARALELO
fig. 9.5
Basta estos ejemplos para demostrar que un conooiniento pre-
vio de los diarganas esquenéticos anteriornente expuestos
facilita oxtraordinariamente la identificacién del tipo de
conexién de un motor dado.
HETODO PRACTICO PARA DETERMINAS EL_# DE_POLOS_DE_UN.NOTOR
Cuando se conoce la velocidad de un motor ¢] problema solo
so reduce a la aplicacién de la formula de 1a velocidad sin-
eréaica y se obtiene el respective uimerc de polos.
120 x F
S=
# polos
F = Frecuencia
§ = Velocidad sinerénice
Pero suponganos que vanos a rebobinar un motor que no tiene
placa y no tenemos datos de velocidad; podenos proceder de
la siguiente manera:
Se cuenta el # de grupos y se divide para el # de fases; se
reconocen facilnente los grupos ya que estén aislados unos
de ctros. con papel prespan y ademés cada grupo de bobines
tiene un principio y un final.
También puede determinarse el # de polos contando las co
nexiones entre grupos, Por ejemplo si se sabe que 01 notor
va conectado en doble estrella y que el # de conexiones
entre grupos es de 6 el motor sera tetrapolar, como se ve en
fa figura 9.8. Los ndmeros indican las conexiones entre
grupos.
HODULO V/Unidad & Pégina No. 5
AoOoOAD
re a
x
Faw A Un motor teitiai-
Heaney gamete en exe:
ja/doble paratelo (2 Y) tiene
Bele puemter de uniGn entre gras
Pare
Te
fig. 9.6
NOTA: Debe ponerse especial cuidado en revisar 1a co-
nexién entre grupos ya que puede ser de CONEXION
ALTERNADA o de CONEXION CONSECUENTE .
CONEXION ALTERNADA
Cuando 1a conexién que tienen los grupos de la misma fase es
alternada coincidiré el ndmero de grupos de una misma fase
con el nimero de polos que hemos determinado segin se ve en
ln figure 9.7, para mejor comprensién solo se ha conectado
los grupos pertenecientes a la fase A de un motor de 4
polos.
og oa
FY Oo FY c
Le
fig. 6.7 Conexién alternada de los grupos
de un motor de cuatro polos
CONEXION CONSECUENTE 5
En cambio si la conexién’es de polo consecuente el numero de
grupos solamente es la mitad que el de polos, y les flechas
que sefialan la circulacién de la corriente indica-
rdén una sola direccién; en 1a figura 9.6 se puede ver la
conexién para un motor de 4 polos pero con conexién conse-
cuente, igualmente se ha conectado solamente la fase A.
MODULO V/Unidad 9 Pégina No. 6
HODULO V/Unidad 9 Pégina No.
a —
AS OMe
fig. 8.8 Conexién consecuente de los grupos
de un motor'de cuatro polos
Hétese la diferencis en el nimero de grupos y 1a conexién
entre ellos en un motor que va a girar a las misnas revolu-
ciones
Esta determinacién es muy importante, caso contrario altera:
riamos la velocidad de funcionamiento del motor, que a su
vez traeria grandes conplicaciones cuando tenga que arras-
trar la carga.
MOTORES TRIFASICOS PARA DOBLE TENSION DE SERVICIO
La mayoria de los motores trifasicos de tamafio pequefio y
mediano se construyen de manera que puedan conectarse a dos
tensiones de alinentacién distintas. £1 objeto principel de
equello es que el mismo motor pueda ser utilizado en locali-
dades con redes de fuerza de distintas tensiones.
Por lo general los terminales externos del motor estén dis
puestos para que puedan conectarse convenientenente los
arrollamientos: “en serie” para la tensién mayor y en
“doble paralelo” para la tensién menor.
Supongamos que tenemos 4 bobinas cada una de elles disefiades
para soportar una tensién de 115 V. Entonces segiin 1a co-
nexi6n que realicemos podenos hacerlos trabajar sea a 115
230 0 460 voltios, segin como podemos apreciar en la figurt
9.9 a, by o.
Por consiguiente, a posar de ser distinta la tensién de le
red en los tres casos precedentes, 1a diferente conexidn d
los grupos deja invariable la tension aplicada individual
mente a cada uno, Todas las néquinze previstas para d
tensiones de servicio se basan en este principio.
a)
b)
°)
fig. 9.9 Conexiones para diferentes voltajes
Con los motores trifasicos se opera de modo anélogo, pudien~
do tenerse motores para conexién en estrella o conexién en
(fisngulo. Estos motores generalmente tienen designados sus
toxninales con ndmeros, normalizedos desde Ti hasta Tiz, ©
tertionente de 1 al 12 en motores que tienen los 12 termina
ginplesetuando tienen 9 terminales tendrén so designacién de
i°8i go tT: al To, segin se ve en la figure 9.10
——_ 7
}
TENSION HENOR TENSION MAYOR
CONEXION ESTRELLA PARALBLO CONEXION ESTRELLA SERIE
fig. 9.10
MODULO V/Unidad 8 Pagina No. 8
Fn la figura 9.11 puede verse la conexién esquemética para
tn motor conectado en tridngulo (tensién mayor y tensién
menor).
TENSION MAYOR TENSION MENOR
fig. 9.11
9.5 MOTORES CONECTADOS EN ESTRELLA / TRIANGULO
Ciertos motores para dos tensiones de servicio tienen los
terninales previstos de modo que el arrollamiento entero
pieda conectarse en estrella (Tensién mayor) o bien en
{riéngulo (Tensién menor). En tal caso las tensionos mayor
y menor deben hallerse en 1a relacién de V3": 1 (en vez de
2: 1 como en los denés tipos).
En estos motores generalmente tenemos 6 terminales que salen
fuera del motor, con las letra U-V-W; X, Y, Z, segin se ve
en la figura 9.12
"eM ' as,
NN
v
v
x
Y
z TRIANGULO ESTRELLA
220¥ 380¥
fig. 8.12 Hotor trifésico con 6 terminales
identificados con letras normalize:
HOD.ILO V/Unidad 9 Pégina No. 9
Para la conexién triéngulo se aplicarén 220 voltios y pare
{a conexién estrella se aplicarén 380 voltios
8 BERASO_DE_LA UNLDAD
a. La identificacién de las conexiones de un motor tri-
fasico es de suna importancia y requiere previo cono-
Giniento de los posibles casos que puedan presentarse.
b. En primer lugar ne deben cortarse terninales ni
Evtrberse bobinas: del arrollamiento hasta cuando se
Gste seguro del tipo de conexién del misno
c. Segin el ndmero de grupos que se conecte a cada hilo de
Tinea la conexién podré me
- Estrella serie
= Eatrelia doble paralelo - con punto contin
= Triéngule serie
- Estrella triple paralelo - con punto conin
= Triéngulo doble paralelo
- Estrella cuddruple paralelo.
d. Bl némero de polos de un motor trif4sico puede deter=
Rinarse mediante el dato de velocidad y aplicando le
formula:
120 x F
8
# polos
e. Se puede determinar 1 ninero de polos contando la:
conexiones entre grupos o también contando e] nimero de
grupos y dividiendo para el ndmero de fases
f. Debe ponerse especial cuidado cuando trate de co-
+ nexién elternada o de conexién consecuente.
$1 es conexién alternada coincide el ndmero de grupos
Ge una migna fase con el niimero de polos.
En cambio si es conexién consecuente, el némero de gru~
pos de Ja misna fase seré la nitad que el nimero de
polos.
HODULO V/Unidad 9 Pagina No. 10
Los motores que pueden trabajar con dos tensiones dis-
Sintas funcionan bajo el mismo principio: para tensién
menor la conexién es en PARALELO. Para la tension
mayor la conexién es en SERIE.
h. Cuando un motor trae 6 terminales oon las letras U-V-W;
X-Y y Z puede funcionar oon dos tensiones, normalmente
conexién en triéngulé 220 voltios y conexién estrella
380 voltios.
-7 QUESTZONARLO
Sia cada hilo de linea van conectados dos grupos la
conexién puede ser ... S--§ ae ey
2. Sia cada hile de linea van conectados tres grupos le
conexién puede ser ...
Cudéntos grupos de bobinas debe haber en la fase A en un
motor que gira 2 1800 r.p.m. y tiene conexién de polo
consecuente?
Cémo deben conectarse los grupos en un motor de dos
tensiones para que trabaje con la tensién nenor?.
|
AODULO ¥/Unided 9 Pégina No. 11 i
WAIDAR29
OBJETIVO:
CONTENIDO:
RECURSOS:
CALCULO Y DISTRIBUCION DE BOBINADOS FRACCLONSRIOS:
Instruir al estudiante para que realice calculos
en bobinados fraccionarios como una introduccién
al disefio.
10.1 Arrollamientos trifésicos con grupos desigua-
les de bobinas
10,2 Bjemplo de bobinado entero
10.3 Bjenplo de bobinado fraccionario
10.4 Repaso de la unidad
10.5 Cuestionario
Conocimiento de las cuatro operaciones.
MODULO V/Unidad 10 Pagina No. 1
10.2
En la unidad No.
8 estudianos las cuatro reglas fundamen-
tales de los devanados de un motor trifésico el ejemplo
aplicado se vio asi mismo que cuando realizamos las opera—
eiones los
dai
se llama ENTERO;
resultados
cuando realizamos 1qs operaciones
tales y los resultados son numeros enteros, 61 bobinado
y, se llama asi porque todos los grupos de
nineros
de las
fueron enteros; entonces
cuatro reglas fun-
bobinas tienen el mismo nimero de bobinas.
Pero en
algunos devanados
de motores trifasicos no tienen
igual nadmero de bobinas los grupos, unos tendrén m&s bobinas
que otros, llanéndose
Para mejor
teriormente.
per ello bobinado FRACCIONARIO.
comprensién ilustremos con ejemplos lo dicho an-
10.2 S2EMPLO_QE BOBINADO ENTERO
Se trata de un motor de 4 polos con 24 ranuras trifésico y
Se desea encontrar:
a. # de bobinas por fase
b. # de bobinas por Polo
©. # de grupos
4. # de bobinas por grupo
DESARROLLO
# bobinas 24
a. # de bobinas por fase = = 8 bob./fase
wtesos 8
# bobinas 24
# de bobines por polo = —— bob. /pole
# polos 4
co. # de grupos = # fases x # polos = 3 x 4 = 12 grupos
# bobinas 24
d. # bobinas por grupoo = = 4. = 2 pob./erepo
® grupos 12
MODULO V/Unidad 10
Pégina No. 2
cone se podré dar cuenta el estudiante todos toe resultados
Gono sc, Paneros enteros, on consecuencia todos tos, snipes
han eee gh mieme ndmero de bobinas, en este cago dos bobinas
fontgrupe; “la distribucién serfa la siguiente:
PoLo 1 POLO 2 POLO 3 POLO 4
ABC apc ABC apc
222 222 222 222
COMPROBACTON
gunamos e1 némero de grupos de 1a fase A = 8 bobinas
unanos el nimero de grupos de 1a fase B = 8 bobinas
sumenos el numero de grupos de 1a fase C = © bobinas
TOTAL , 24 bobines.
EJEMELO_DE_BOBINADO ERACGLONARLO.
Se trata de un moter de 4 polos con 54 ranures, triffsico, ¥+
se desea encontrar:
a. # de bobinas por fase
b. i de bobinas por pole
ce. # de grupos
d. # de bobinas por srupo
DESARROLLO
# bobinas 54
# de bobinas por fase = —————— = —3— = 18 bob./fase
# fases 3
, # bebinas 54
b. # de bobinas por polo = ————— = 2 *bRae bob/polo
# polos 4 (FRACCIONARIO)
7
ce. # de grupos # feses x # polos = 3x 4 = 12 grupos
DULO V/Unidad 10 Pégina No. 3
d. # bobinas por grupo =
it
Cono se
mero de bobinas por polo no
namero de bobinas por
un poquito mas de bobina,
grupos de cuatro bobinas y
ahora la pregunta seria
truyo de 4 y cnéntos grupos
mos hacer lo siguiente:
a. El resultado del nimero de bobinas por grupo se debe
dejar expresado en numero mixto sin reducir la frac-
cién, 0 se
s¢ [12 84 6
os es lo mismo —— = 4 —
12 12
Seguidamente se
nuestro ejemplo que es:
tt bobinas
dargcuenta el estudiante el resultado del ni-
grupo tampoco es entero;
podr& dar cuenta no se puede construir grupos de
y cugntos grupos de bobinas cons-
trabaja con
54 6
4 — bob./grupo
12
grupos 12
y adends el
¥, como se
4 bobinas y
que tendré que construirse
de cinco bobinas, pero
es un ndmero entero,
sino
grupos
de 5 bobinas?. Para esto debe-
el nimero mixto, cojamos el de
6
‘=
12
Recuerde que no e debe reducir la fraccién.
Entonces el nuemrador de la
grupos con mayor nimero de
una unidad. para el ejemplo
6 grupos de 4+ 1
y 6 grupos de 4
TOTAL 12 grupos
A continuacién debemos distribuir uniformemente en
del estator las bobinas de modo que cada fase cuente
feria
con el mismd nimero de bobinas,
Se acostumbra simbolizar los grupos con
cada una
en nuestro ejemplo seria el
se pone debajo de
contrado,
numero conveniente en forma
eién:
MODULO V/Unidad 10
fraccién nos indica e1 nimero de
bobinas, el numero entero sumado
que estamos siguiendo serfa:
bobinas = 30 bobinas
bobinas = 24 bobinas
54 bobinas
la peri-
© sea 18 bobinas.
las letras A-B-C y
el mayor numero de bobinas en~
5, luego se resta el
simétrica como se ve # continua-
Pégina No. 4
POLO 1
ABC
555
-1o-t
454
Sumenos ahora el numero de bobinas que
FASE A: 4454445
FASEB: 5+4+5+4
POLO 2 POLO 3 POLO 4
apc ABC ABC
B55 555 555
“1 “1-1 “1
545, 454 + B45
tienen las fases:
18 bobinas
18 bobini
FASE C: 4 +5 +4 4 +4 5 = 18 bobinas
Para comprobar que hemos hecho una
TOTAL 54 bobinas
buena distribucién simé—
triea se comprueba con el diagrama circular.
FASE_A
FASE A+B
DULO V/Unidad 10
Como se podrd observar estén diametralmente
opuestos los grupos que tienen mayor numero
de bobinas. con esto se logra que el flujo
magnético se distribuya uniformemente.
Pagina No. 5
Como se podraé fijar el estudiante hemos equi-
librado con la fase B y tenemos hasta ahora @
bobinas en cada polo.
FASE AFB+C 2
Ahora ya tenemos completa la distribucién y como podré darse
cuenta el estudiante hemos equilibrado el numero de bobinas
que existe en cada polo, en otras palabras lo que hicinos
linealmente lo hemos trasladado al diagrama circular para
darnos cuenta muy rapidamente si se esta distribuyendo bien
o mal.
NOTA: No se debe sacar las bobinas de grupos seguidos,
ya que la distribucién va a ser pésima y ademas el
rendimiento del motor bajara ostensiblemente, a
continuacién voy a ilustrar lo que no se debe
hacer, por eso lo voy a tachar.
Sumemos ahora el némero de bobinas que tienen las fases:
FASE A: 44445 + 5 = 18 bobinas
FASE B: 4+ 4+ 5 +5 = 18 bobinas
FASE C: 4 + 4 45 + 5 = 18 bobinal
TOTAL 54 bobinas
HODULO V/Unidad 10 Pagina No.
NUNCA HAGA ESTO/
©,
ce
como se ve cloramente cuando este motor funcione en un lade
Sel’nctor habr& més flujo que en el otro con lo que el motor
bajaria notablemente su rendimiento.
Fijese que e1 motor solamente tiene 54 bobinas que es igual
Fis eee atode ranuras expuesto en el ejemplo, adenés cada
Fist tiene el mismo numero de bobinas 18 para nuestro ejen-
EIS° Gero Ja mala distribucién haré que fracasemos en case
e2eiencr que disefiar un motor o recuperar una carcaza que se
de entra sin bobinas y queremos que el motor vuelva & fun-
eionar
10.4 REPASO DE LA UNIDAD
Por 1a caracter{tica misma de esta unidad no existe repaso,
ree bien recomiendo al estudiante memorizar todo lo. refe™
Mente a la distribucién de bobinados fraccionarios ya que
Sto nes va a servir en las siguientes unidades, cuando tra-
femos de odloulo de motores trifdsicos.
10.5 CUBSTLONARIO
1, Siguiendo los Lineamientos vistos on esta unided reals~
see Calculo y distribucién para los siguientes pro-
jblemas:
a. sb trata de un motor trifasico con 48 ranuras, 6
polos.
se trata de un motor trifaésico con 27 renuras, 4
polos.
se trata de un motor trifésico con 30 ranuras, 4
polos.
DULO V/Unided 10 Pégina No. 7
YuEDAD LL
OBJETIVO:
CONTENIDO:
i
} RECURSOS:
i.
DETECCION, LOCALIZACION Y REPARACION DE AVERIAS EN
Los Ht
Tener
fecto
wad
11.2
11.3
1.4
11.5
11.6
11.7
11.8
11.9
11.10
¢ MODULO V/Unidad 11
(OTORES TRIFASICOS
una gufa bésioa para detectar posibles de-
so fallas que tengan los notores trifésicos.
Contactos a nase
Interrupeion
Cortocirevitos
Inversiones de polaridad
Inversiones ae bobinas
Inversiones de grupos
Inversiones de fases
Averias és freouentes en notores
triffsicos
Repaso de 1a unidad
Cuestionario
brajula
fuente variable de corriente continua
variac trifasico.
Pégina No. 1
aa.
41.2
11.3
GONTACTOS AHASA
Ya estudiamos en la unidad No. 4 al referirnos a los moto-
res monofasicos, pero haremos incapié en que debemos probar
fase por fase estando estas separadas.
De detectarse una fase con este defecto se procurar4 local
zarel mismo y tratar de solucionar, a veces es necesario
Separar todos los grupos para probar uno a uno
INTERRURCLONES
Pueden producirse por rotura de alain hilo o tembién por un
mal empalme o conexién floja, la prueba se realiza con un
ohmetro o también con una lémpara de prueba, para detectar
esta falla es necesario que se pruebe fase por fase como en
el caso anterior.
SORTOCIRCUITOS
Se estudis en 1a unidad No. 4 por lo que recomiendo repasar™
y revisar dicha unidad
12.8
Son debidos a conexiones erréneas de bobinas, grupos o
fases, causadas por descuido eventual o falta de experiencia
del bobinador.
INVERSIONES DE pOpINAS
En todos los motores polifasicos, las bobinas pertenecientes
a un mismo grupo deben estar conectadas de manera que la
corriente circule por todas ellas en el mismo sentido. Si
se ha ejecutado una o varias conexiones erroneamente, 1a
corriente circularé por las bobinas afectadas en sentido
contrario al debido, con las consiguientes inversiones de
polayidad.
Efectuando el devanado por grupos no puede cometerse evi-
dentemente este error, a menos que las bobinas se alojen en
las ranuras al revés por error o descuido al introducirlas.
El mejor método para localizar bobinas con la polaridad in-
vertida es examinarlas visualmente todas una por una sin
embargo, ello no es siempre posible. Un sistema de compro-
MODULO V/Unidad 11 Pagine No. 2
bacién muy seguro consiste en alimentar separadamente cada
fase con wna fuente de corriente continua de baja tensién,
por ejemplo una bater{fa y recorrer con una bréjula todo el
estator, junto al bobinado.
A medida que la brijuln pasa frente a cada polo de una misma
fase, la agnja iré scusando alternativamente el cambio de
polarided, (procedimiento visto en la unidad No. 4).
NOTA: Si al hallarse ante un polo, la aguja se mantiene
en una posicién mas bien indefinida, habré proba-
blemente una bobina con las conexiones invertidas
en dicho polo. Esta bobina crea un campo megné-
tico de sentido opuesto al creado por las denés,
lo cual debilita el campo resuitante, y el efecto
de éste sobre 1a aguja de la brujula.
11.6 INVERSIONES DE_GRUPOS
Se produce por la mala conexién entre grupos de la misma
fase, la forma de comprobar es idéntica al procedimiento
anterior, se lo hard asi mismo con ayuda de una fuente de
C.C..y una brojula.
11.7 UNVERSIONES DE_FASES.
Sucede a menudo en la conexién final; por ejemplo supon-
gamos que se va a realizar una conexién estrella y por error
en vez de puentear los tres finales punteamos dos finales ¥
un principio de fase o si se trata de una conexién en trién-
gulo es posible que nos hayamos equivocado asi mismo en las
conexiones de principio y finales. Cuando esto sucede el
motor funcionaré con un zumbido magnético, ademés la
corriente en las tres fases serd4n desiguales, por lo tanto
el motor corre el peligro de quemarse, si no se remedié a
tiempo.
La mejor manera de comprobar es conectando en estrella y
alimentando con C.C. de baja tensién al punto neutro y el
otro lado de la fuente a cada una de las fases, en estas
condiciones se pasa la brijula frente a cada grupo y la bri-
Sula debe cambiar alternativamente de no hacerlo as{ enton-
ces’ en la fase que se repita la polaridad anterior debe cam-
biarse el-principio por el final.
Otro método que da 6ptimos resultados es el siguiente:
Realizadas las conexiones se alimenta el estator con
corriente trifasica de baja tensién y se hace rodar una bola
metélica o rodamiento dentro del estator como se ve en la
figura 11.1.
MODULO V/Unidad 11 Pagina No. 3
fig. 11.1 Comprobacién de las conexiones de las fases
Cuando las conexiones estan bien realizadas la bola giraré,
de lo contrario, permanecer4 estdtica en el lugar que se
tiene una inversién de polaridad, ayudéndonos con esto a
detectar 1a posicién del grupo o de la bobina que tiene
falla.
11.8 QVEREAS HAS ERECURNTES EN HOTORES TRIFASICOS.
A continuacién enumeramos las causas m&s frecuente:
en este tipo de motores en la Unidad No. 4 ya estud
detenimiento la mayoria de pruebas, aqui nos limitaremos
solamente a enumerarlas.
1. EL MOTOR NO ARRANCA
a. fusible fundido
b. cojinetes desgastados
©. sobrecarga
d. fase interrumpida
©. + bobina o grupo de bobinas en cortocircuito
f. barras rotéricas flojas
@. conexiones internas erroneas
h. cojinentes agarrotados
i. arrollaniento con contacto a masa.
MODULO V/Unidad 11 Pégina No. 4
8
b.
e.
a
za
EL HOTOR NO FUNCIONA CORRECTAMENTE
fusible fundido
cojinetes desgastados
bobina con cortocircuito entre espira:
fase con polaridad invertida
fase interrumpida
conexién en paralelo interrumpida
arrollamiento con contacto a masa
barras rotéricas flojas
tensién o frecuencia incorrectas.
3. EL MOTOR GIRA DESPACIO
bobina o grupo de bobinas con cortocircuite
Bobina o grupo de bobinas con la polaridad inver-
tida
Cojinetes desgastados
sobrecarga
fase con la polaridad invertida
barras rotéricas flojas.
4. BL MOTOR SE CALIENTA EXCESIVAMENTE
sobrecarga
cojine tes desgastados o agarrotados
bobina © grupo de bobinas con cortocircuito entre
espiras
funcionamiento como nonofdsico
barras rotéricas flojas.
Ciando probemos un motor triffsico en vacio debe-
mos medir la corriente que consume el mismo y ésta
debe ser aproximadamente la tercera parte de la
nominal (de lo que indica la placa) en cada una de
las fases; si cualquiera de las fases consume
m&s que las demés es sefial evidente que el motor
tiene averia.
MODULO V/Unidad 11 Pégina No. 5
a.
Esta prueba es bésica y es necesario realizarla ya que nos
indica aproximadamente el estado en que se encuentra el
motor trifasico.
Si la corriente es menor que la tercera parte de la nominal
y ademaés es equilibrada, significa que el motor est traba-
Jando con tension, menor a la nominal, en cuyo caso se deber&
cambiar la conexih, por ejemplo el motor debe funcionar con
220 voltios y conexién tridngulo, pero si le hemos puesto
conexion estrella deber{amos aplicar 360 voltios y si por el
contrario le aplicamos 220 voltios, la corriente que con-
sume en vacio ser4 menor que la tercera parte; si no can-
biamos la conexién, al cargar el motor, este se quemara.
REPASO_D)
a. La mayoria de fallas fueron estudiadas en la Unidad
No. 4
b. Es posible que por un error involuntario o por falta de
pericia se invierta una bobina, un grupo o toda una
fase, en cuyo caso es conveniente realizar las pruebas
que estudiamos en la Unidad No. 4 pero como es tri-
f4sico debemos realizar las pruebas en cada una de las
-fases
c. Las fallas que se producen en los motores trifésicos
son similares a las estudiadas en 1a Unidad correspon-
diente a motores monofdésicos, por lo mismo la repar:
cién deberé ser aproximadamente la misma, es por eso
que reconmiendo estudiar detenidamente la unidad No. 4
correspondiente a motores de fase partida.
4d. Reeuerde que cuando se prueba un motor triffasico on
vaefo el consumo de corriente debe ser la tercera parte
de 1s nominal.
11,10 CUESTIONARIO
1. C6mo se comprueba que una fase esté invertida en un
motor trifsico?
2. @ué se comprueba con ayuda de una brdjula y una fuente
variable de corriente continua
3. | Si el motor consume menos de la tercera parte de la
* corriente nominal en vacio que se debe hacer?
4. Si el motor se calienta excesivamente cudles pueden ser
las posibles fallas?
S. Siel motor gira despacio cudles son las posibles
fallas?.
MODULO V/Unidad 11 Pagina No. 6
WNIDAD_12
OBJETIVO:
CONTENIDO:
RECURSOS:.
CALCULO DE MOTORES TRIFASICOS
Dar al estudiante los pasos necesarios para la re-
cuperacién de carcazas de motores trifdsicos en
forma sencilla y fécil.
12.1 Generalidades
12.2 Procedimiento de c&lculo
12.3 Repaso de la unidad
12.4 Cuestionario
= conocimiento de las cuatro operaciones
= conocimiento de las unidades
= caleuladora. p
MODULO V/Unidad 12 Pégina No. 1
12.1 GENERALIDADES
12.
2
El célculo que vamos a proponer se ha desarrollado en base @
la necesidad de modificar, o recuperar un motor trifésico, o
también en el caso de tener que cambiar el devanado de un
motor monofasico a devanado trifésico. Sea cual fuere la
necesidad que se nos presente el procedimiento es el mismo
que por civrto es bastante sencillo y ha sido comprobado a
base de In recuperacién y modificacién de mucho motores que
en la actualidad se encuentran trabajando en la industria
Para la fabrica de motores eléctricos e1 céloulo representa
una tarea de proyecto y otra de verificacién en el laborato-
rio pero pera el bobinador el asunto es diferente, pues debe
resolver distintos problemas para cada motor y no diseflar un
prototipo en el cual se invierte tiempo y dinero para luego
econstruir muchas unidades en serie. Por esta razén dese
rrollaré el procedimiento de célculo de un bobinado en forma
general, no aplicable a las fAbricas sino al taller de rebo-
binoje. Claro gue el principio es unico; y, puede ser adap-
tado al proyecto de una serie de motores, con las debidas
comprobeciones y mediciones en el laboratorio
EROCEDINIENTO DE CALCUL
Vamos a partir desde el punto de vista que se tiene un motor
que no tiene bobinas y todos los datos referentes al bobi-
nado se han extraviado.
PRIMER PASO: TOMA DE DATOS DE PLACA
Los datos de placa son los siguientes:
TIPO MH 11252 No, 1296322 Hz 60
HP 5.5 220/380 Vv. 16.5/8.5 Amp.
RP 1750
Con los datos de placa nos damos cuenta que se trata de un
motor de 5.5 IP que puede trabajar con 220 voltios conectado
en triangulo y con 380 voltios se le conecta en estrella,
ademas se puede ver claramente que se trata de un motor de 4
polos.
SEGUNDO PASO
Para compietar los datos se toma el didmetro interior del
yugo (nacleo de chapas del estator) en centimetros; adenés
se toma la longitud del yugo y no de la carcaza.
Tomamos adem4s el dato del nimero de ranuras que tiene el
estator, para el ejemplo que vamos siguiendo los datos son
los siguientes:
MODULO V/Unided 12 Pagina No. 2
= 9.0 cms.
11.2 om!
jo. ranuras = 36
zero
TERCER PASO:
Se aplica la resolucién de las 4 regles fundamentales vistas
en la unidad No. 8 suponiendo que se va a realizar un deva-
nado imbricado de doble capa
36 bobinas
# de bobinas por fase
"
12 bobinas/fase
3 fases
36 bobinas
= 9 bobinas/polo
# de bobinas por polo
4 polos
c. de grupos = 3 fases x 4 polos = 12 grupos
36 bobina:
d. # bobinas por grupoo = = 3 bobinas/grupo
12 grupos
GUARTO PASO: .
Calculamos el paso de ranura.
® de ranuras 38
Yk = ————__ =» —— = 8
# de polos 4
QUINTO PASO:
Calculamos el No. de grados electricos entre ranura y ranu-
ra.
180 x # de polos 160 x 4
= = = 20 °
# de ranuras 36
MODULO V/Unidad 12 Pagina No. 3
NOTA: Una bobina, es ciento por ciento “EFECTIVA" cuando
abarca 18 eléctricos.
En motores antiguos se elegia siempre el paso de bobina de
180? eléctricos ya que ei hierro que constituia el yugo no
era de buena calidad.
En motores modernos cuyo hierro es de excelente calidad se
ha logrado acortar el paso de bobina sin que baje aprecia-
blemente la EFECTIVIDAD DE LA BOBINA, lo que constituye un
ahorro apreciable de alambre de cobre.
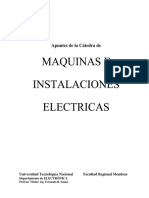
En la figura 12.1 se puede apreciar una bobina con el paso
de 160° E, que seria la normal para un motor antiguo.
[4-80 *E ———--|
fig. 12.1 Bobina que abarca 180° 5
Nétese que la bobina abarca mitad de la ranura 1 més la 2,
3, 4, 5, 6, 7, 8, 9; y, la mitad de la ranura 10, en con-
secuencia la bobina abarca 9 ranuras que multiplicada por
20° E segin lo anteriormente calculado nos da 180 E.
En los motores modernos TODO EL GRUPO DEBE ABARCAR LOS 160°E
co UN VALOR CERCANO.
aso de bobina acortado,
89
ap —________!80 °B
fig. 2.12 Grupo que abarca 180° £
10DULO V/Unidad 12 Pégina No. 4
Nétese que, el paso de bobina es 140° EB y que todo el grupo
abarca 180° E.
En realidad hemos bajado un poco 1a efectividad de 1a bobi-
na, pero igualmente hemos ahorrado cobre, la efectividad de
la'bobina no ha bajado mucho, dado que como estamos reali-
zando un bobinado imbricado doble capa, e1 flujo magnético
se distribuye uniformemente; y, recordemos que estamos rea-
lizando un devanado imbricado doble capa, con lo que se com-
pensa en algo la efectividad de las bobinas.
SEXTO PASO:
Como es un bobinado entero no es necesario realizar la com-
probacion en el diagrama circular. Cuando se trata de un
bobinado fraccionario es necesario distribuir uniformemente
el elude, Sinose vin an a unidad Na 19
SEPTINO PASO:
Debemos ahora comprobar si con el paso elegido es ejecutable
el bobinado, para lo cual se traza un diagrama con el nomero
de ranuras de las carcaza, en otras palabras hagamos cuenta
que cortamos la carcaza y la extendemos en el plano, segin
se ve en la figura 12.3
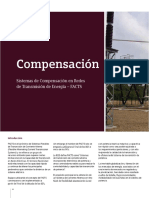
Woo lofo Pex PeL-[-L-fe fo
ears [i fe[s[a]s[e]7[o[ofioln
Bon lolol felx|-l-]-f0 lo
© BOBINAS DE LA FASE A
. X BOBINAS DE LA FASE 8
— BOBINAS DE LA FASE C
fig.’ 12.3 Bobinado imbricado de doble capa con paso de
bobina de {80°E; e1 grupo abarca 220° B (motor antiguo)
En la figura 12.4 se puede ver el detalle del bobinado com-
pleto que es exactamente al de la figura 12.3
MODULO V/Unidad 12 Pfgina No. 5
45.675 900 BBKK BT B19
"
|
be
wiv ww
ora rad "
fig. 12.4
En ocasiones se suvle alar
que el grupo abar.
de tener una efecti:
gar un poquito las bobinas, con lo
ré nds de 180° E, esto se hace con el fin
vidad de bobina més o menos nornal.
En la figura 12.5 se puede apreciar el diagrana extendida de
ia carcaza.
ofo -]-]-JoJofofx]x]x]-|-]-]o
{19 eofar eae fes|s0]31/32]3]54/s5]3e
[Ree Ti Taps]
[2a Lol elo fx efx
ALO,
supenion | 10] |x
afi
[ole [o]x|x]x
‘ofx
a
© BOBINAS DE. LA FASE A
X BOBINAS DE. LA FASE B
~ BOBINAS DE. LA FASE Cc
fig. 12.8 Bobinado imbricado doble capa con paso de bobina
de 160° E El grupo abarca 200° E (motor moderno)
MODULO V/Unidad 12 Pagina No. 6
“| du bv bw
En la figura 12.6 se puede apreciar el detalle del bobinado
completo que es exactamente el de la figura 12.5
678900 2B KS 6 7B 19 2021 22.23% 52 7BHWMY VDBU B
Z oX oY
fig. 12.6 Detalle de bobinas de la figura 12.5
NoTA: El diegrama del plano extendido de las figuras
12.3 y 12.5 sirve para comprobar que el devanado
con el paso de bobina es ejecutable o no, enton-
ces, se dice:
“Que un devanado es ejecutable cuando en cada ranura apare-
cen solamente dos lados de bobina”.
“Un devanado no es ejecutable cuando al hacer 1a comproba-
eion en el diagrama del plano extendido en una ranura epa-
rece mas de dos lados de bobina’
Nétese que en cada ranura de las figuras 12.3 y 12.5 sola-
mente aparecen dos Iados de bobina; si al hacer la compro-
baci6én aparecen tres lados de bobina en una ranura, el bobi-
nado no es ejecutable en cuyo caso se tendr& que buscar un
nuevo paso de bobina y probar otra vez.
MODULO V/Unidad 12 Pégina No. 7
En la figura 12.6 se puede apreciar el detalle del bobinado
completo que es exactamente el de la figura 12.5
fig. 12.6 Detalle de bobinas de 1a figura 12.5
Nora: El diagrama del plano extendido de las figuras
12.3 y 12.5 sirve para comprobar que el devanado
con el paso de bobina es ejecutable o no, enton-
ces, se dice:
“Que un devanado es ejecutable cuando en cada ranura apare-
cen solamente dos lados de bobina’
“Un devanado no es ejecutable cuando al hacer 1a comproba-
e1én en ei diagrama del plano extendido en una ranura ap!
rece mas de dos lados de bobina".
Nétese que en cada ranura de las figuras 12.3 y 12.5 sola-
mente aparecen dos lados de bobina; si al hacer 1a compro-
bacién aparecen tres lados de bobina en una ranura, el bobi-
nado no es ejecutable en cuyo caso se tendré que buscar un
nuevo paso de bobina y probar otra vez.
HODULO V/Unidad 12 Pégina No. 7
OcTAVO PASO
Comprobado que el bobinado es ejecutable con el paso esco-
gido lo que nos resta es saber cuantas espiras debe tener
cada bobina, para ello vamos a aplicar una férmula empirica
que ha dado buenos resultados:
NPP x V x 108
2.664 xdx1xB
en donde: Z = nimero de espiras por fase
NPP = ndmero de pares de polos
V = voltaje al que esté sometida la fase
2.664 - CONSTANTE para e1 c&lculo con 60 Hz
= digmetro interior del yugo en centinetros
= se debe tomar entre 5.000 y 6.000
d
1 = largo del yugo en centimetros
B
lineas/cn?
pero en la generalidad de casos se toma 6.500 lineas/om?
Volvamos con nuestro ejemplo y veamos:
La placa decia 220/380 V, lo que significa que el motor va a
trabajar en triéngulo con 220 VY y en estrella con 380 V,
pero en cualquier condicién que funcione la fase siempre va
a estar sometida a 220 voltios segin se vio en la Unidad
No. 9.
Reemplazamos entonces los valores en 1a férmula:
l
NPP x Vx 108
z
2,664 xdx1xB
é
2 x 220 x 108
. z
s 2,864 x 9.0 x 11.2 x 6.500
440 x 104
z=
17454.28
HODULO V/Unidad 12 Pégina No. @
252.08 espiras por fase
4400000 ~
17454.28
Recordemos que cada fase tenia 12 bobinas segiin lo calculado
en el tercer paso, entonces dividimos el nimero de espiras
por fase para el numero de bobinas y obtenemos el numero de
espiras por bobina segin se ve a continuacién:
No. espiras por fa: 252.08
No. espiras bobina = ————— = 21.00
No. de bobinas ° 12
Ahora ya sabemos el ntimero de vueltas que debemos poner al
fabricar las bobinas para la carcaza que estamos recuperan-
do. 7
NOVENO PASO:
Nos resta calcular la seccién del conductor.
gan la placa de caracterfsticas del motor nos dice que
cuando trabaja con 220 voltios la conexién es en tridéngulo
y a plena carga tomaré 16.5 amperios.
entonces la corriente de fase serd:
In
vat
segin se vio en el Nédulo IV, Unidad 11.
Tee
Volviendo a nuestro ejemplo tenemos:
16.5 18.5
= = 9.5 Amp,
Ys 3.73
Ahora apliquemos 1a férmula de la seccién del conductor que
es:
Ir
en la que: S = Seccion del conductor en mm?
Is = corriente nominal de la fase
"
= densidad de corriente en amperios/mn2
9
| W/Unidad 12 Pagina No. 9
La densidad de corriente se toma entre 5.0 y 7.5 Amp/mn?
para la generalidad de casos se toma 5.5 Amperios/mn?
Caloulemos entonces para nuestro motor:
Ie 9.5 Amp
8 = = 1.7272 mm?
D 5.5 Amp./mn2
El resultado es 1.7272 mm? con este valor vamos a la tabla
del apéndice de esta unidad (tabla 12.7) y buscamos en la
columna “SECCION mm?” un valor parecido,para nuestro caso el
valor mas préximo es 1.8504 que corresponde a un alambre No.
15 AWG, segin indica la columna de la izquierda.
DECIMO PASO:
Para no desperdiciar material y recordando que estamos recu-
perando una ecarcaza cuya caracteristioa del hierro no co~
necemos con exactitud se recomienda hacer lo siguiente:
Se cortan alambres de bobina segun lo calculado, para nues—
tro caso el No. 15 AWG y segin lo calculado sabemos que en
cada ranura van 2 lados de bobina, entonces en cada ranura
irén 42 espiras del alambre No. 15 AWG, deciamos se cortan
alambres del largo del yugo,en nuestro caso 42 y se intro~
ducen en la ranura, si caben perfectamente, considerando el
espacio para los aislantes entonces estamos seguros que no
fracasaremos; en ocasiones nos falta espacio; en cuyo caso
lo que se hace es bajar 1a seccion del conductor y se pon~
dria un 16 AWG; no disminuya el No. de vueltas, ya que el
nimero de vueltas viene relacionado con el voltaje aplicado.
En cambio si al poner los alambres correspondientes queda la
ranura con mucha holgura entonces se debe poner un alambre
mas grueso, por ejemplu el No. 14 AWG.
NOT.
En ocasiones no se dispone del alambre caloulado
sino otro m&s delgado, se puede reemplazar lo:
alambres gruesos por otros més delgados por ejem
plo si no disponemos del alambre No. 15 AWG se
puede reemplazar con dos alambres No. 18 AWG en
cuyo caso al realizar la prueba de “si entra o ne
- el numero de espiras”, tendrfamos que cortar 84
alambres No. 18 AWG 'y probar si entra o no en la
"ranura.
Si seguimos los pasos uno a uno y calculanos en debide
forma, est6 seguro que el motor funcionaré satisfactoria-
mente, pero reouerde que no puede darse e] lujo de equivo-
carse en una coma, en un punto o en una sola cifra al reali
zar los céleulos.
MODULO V/Unidad 12 Pagina No.
# ves ' coo
Rgcuerde sefior estuginnte, cuando se trata de célou
nftores colo se tiene dos alternalivas: "0 ESTA BIEN”,
ESTA HAL", no existen intermedios .
ABPASO_DEWLA UNIDAD
Por lo mismo que no existen’ intermedio para e1 cAlculo, en
esta unidad no existe repaso .
79 SABE —EAICULAN—STOUTERDO—LOS—DTEEPASOS-DEL CLEC
ORFINITIVAMENTE NO SABE"
| 12>4 GUESTLONARIO N
Como cuestionario recomiends al ontudiante redopilar dntos
Gepotores origitales 0 aotores que han estado teabalando. ¥
serhan quenado, ¥ realizar el célouio a manera de conpa:
cidén, especialmente en lo que se refiere al No. de espiras
por bobina ¥ gor Fa
soi--——si-ueted-resliza correctamente cada uno de los pasos t:
la seguridad que su motor funcionaré alas wil maravil
como muchos de los motores que hay dia los tengo funcionando
ae ia aidueer ia ‘
“0 winded 2 oe 5
OP ARLA PARA ALAMHDRES. DET CORRE
© aus! IAHR wm SECCION ew? FESO (CORRTENTE A
toy .25195 53. :
: 7.134057 42.4126
eae ‘i5aa0g 35.8347
eo
aT < $.02767_- 26.4738
a Bi1gveo™ 21.1530
Aalezinas 1617750
"BE, +
4.11560 1363032 110.37007
Pisezon “to.se7e 93.8861
Bs. BebgamL , 0L36e4 7a,A537
Bocca te ge
A.90kso 4.6849
RB cae31 | s.2817'
TE gypaenne = 48727,
4 EBsage 3309
Glas 3le2a2
eee logit
AER igh 56504
ei sabe sd ¢
Rgipene, 400378:
‘ are
bay7s So e231,
yighe |. olence +
otsi77
ase
8:eatzs.
Pterzoaran g
foe = (OERaa9S FS
“o.egnsze ; o:aszday
gvoaoz0g |,
Teqsoztdiig: 0”
omteaaias”
Suoisyea
10, FAv00% 6.082888
eine *voreay
1, Pabboreey :
es ee? . 79905, 3
‘00767 Totosesiy: - 1 d.ggsive } onokseds
cy GeBRRay “SI RGEet Sera Seat 4080:
peters sprseserat. 8: Doppeatize
FeGO708S5 gh. 02:
You might also like
- Extracto NTCSEDocument16 pagesExtracto NTCSEJulio Begazo PeñaNo ratings yet
- Motores EléctricosDocument127 pagesMotores EléctricosJulio Begazo PeñaNo ratings yet
- Fórmulas de Máquinas EléctricasDocument10 pagesFórmulas de Máquinas EléctricasJulio Begazo PeñaNo ratings yet
- Maquina CC y Maquinas EspecialesDocument51 pagesMaquina CC y Maquinas EspecialesJulio Begazo PeñaNo ratings yet
- Maquinas Electricas - Mantenimiento de (Ites-Paraninfo)Document70 pagesMaquinas Electricas - Mantenimiento de (Ites-Paraninfo)Jorge Uriol100% (3)
- Determinacion Parametros Maquina AsincronaDocument363 pagesDeterminacion Parametros Maquina AsincronaJulio Begazo PeñaNo ratings yet
- Apuntes de Maquinas EléctricasDocument114 pagesApuntes de Maquinas EléctricasJulio Begazo Peña100% (1)
- Catálogo Terminales Metálicos LCTDocument68 pagesCatálogo Terminales Metálicos LCTJulio Begazo PeñaNo ratings yet
- Cap02 Maquinas SincronicasDocument43 pagesCap02 Maquinas SincronicasJulio Begazo PeñaNo ratings yet
- CompensaciónDocument6 pagesCompensaciónJulio Begazo PeñaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)