You might also like
- Control Básico Del Twin Rotor Trm1Document3 pagesControl Básico Del Twin Rotor Trm1jimmy naranjoNo ratings yet
- Práctica IDocument4 pagesPráctica IJuan PerezNo ratings yet
- Labview DSC y AlarmasDocument2 pagesLabview DSC y AlarmasjonathansataNo ratings yet
- Infografía 2 (Tipos de Sistemas de Control)Document1 pageInfografía 2 (Tipos de Sistemas de Control)LEONARDO VILLARREAL PEREZNo ratings yet
- Estabilidad en El SepDocument8 pagesEstabilidad en El SepDaniel Fernando Reyes PerezNo ratings yet
- Estabilidad de Sistema Aplicado en Polos y CerosDocument8 pagesEstabilidad de Sistema Aplicado en Polos y CerosDianaFloresNo ratings yet
- 1 La Rueda Tria Üdica y La Rueda MunsellDocument6 pages1 La Rueda Tria Üdica y La Rueda MunsellnanacNo ratings yet
- Criterio de BodeDocument28 pagesCriterio de BodeAbraham SerranoNo ratings yet
- Examen Unidad 2 de Control IIDocument2 pagesExamen Unidad 2 de Control IIEMMIT ALDAIR SILVA TOMENo ratings yet
- Reporte 2Document14 pagesReporte 2Cristian AlejandroNo ratings yet
- Informe N 05 Máquina SíncronaDocument20 pagesInforme N 05 Máquina SíncronaNeyserBurgaMarin100% (1)
- Resolución de La Ecuación de Laplace Por Medio de Iteración Numérica en MatlabDocument10 pagesResolución de La Ecuación de Laplace Por Medio de Iteración Numérica en MatlabGerardoDuranNo ratings yet
- Efecto FerrantiDocument9 pagesEfecto FerrantiErnesto Torres QuirogaNo ratings yet
- Conversores de EnergíaDocument53 pagesConversores de EnergíaPatrick Fs DeadLove100% (1)
- Sistemas Electricos LabDocument39 pagesSistemas Electricos LabIveth AlvarezNo ratings yet
- Caracteristicas SepDocument9 pagesCaracteristicas SepMoises Gomes de LimaNo ratings yet
- Práctica 1 Dimmer DigitalDocument9 pagesPráctica 1 Dimmer DigitalSergio RCNo ratings yet
- Resumen Certamen 1 - Análisis Numérico USMDocument3 pagesResumen Certamen 1 - Análisis Numérico USMGwsazoNo ratings yet
- Práctica Nodos y Mallas PDFDocument6 pagesPráctica Nodos y Mallas PDFDaniel AndresNo ratings yet
- Acondicionamiento de SeñalesDocument9 pagesAcondicionamiento de SeñalesAllison ElianaNo ratings yet
- Funcion Logica XORDocument11 pagesFuncion Logica XORYoiner ColoradoNo ratings yet
- Modelado de CargasDocument7 pagesModelado de CargasraulNo ratings yet
- Circuito 7447 TTLDocument3 pagesCircuito 7447 TTLHéctor Fidel Chire RamírezNo ratings yet
- 06 Tema 6 Proteciones de Generadores, Transformadores y Lineas PDFDocument75 pages06 Tema 6 Proteciones de Generadores, Transformadores y Lineas PDFAlan Jesus Brun100% (1)
- 1 Laboratorio de Control FINAL PDFDocument6 pages1 Laboratorio de Control FINAL PDFIVAN ALONSO CCAHUACHIA LETONANo ratings yet
- Programacion Estructurada en LabviewDocument5 pagesProgramacion Estructurada en LabviewAlejandraNo ratings yet
- Laboratorio de Máquinas Eléctricas IDocument7 pagesLaboratorio de Máquinas Eléctricas IcarlosmorgadohdzNo ratings yet
- Cargabilidad - Mejor Ejercicio PDFDocument15 pagesCargabilidad - Mejor Ejercicio PDFTaloNatalacioNo ratings yet
- Practica 1 Compensador de Tipo Pasivo de Adelanto de FaseDocument14 pagesPractica 1 Compensador de Tipo Pasivo de Adelanto de FaseDaniel Reyes Vasquez100% (1)
- Seccionadores de ProtecciónDocument17 pagesSeccionadores de ProtecciónOliverAlexanderMartinez100% (1)
- Estimacion de EstadosDocument8 pagesEstimacion de EstadosrogeliochcNo ratings yet
- Tarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPDocument9 pagesTarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPdmdgvoNo ratings yet
- 3 Informe de Laboratorio MatlabDocument2 pages3 Informe de Laboratorio MatlabNatalia Orjuela AraqueNo ratings yet
- Matlab CodeDocument2 pagesMatlab CodeDeiverNo ratings yet
- ConclusionDocument1 pageConclusionJose Luis RamirezNo ratings yet
- Instrumentacion de Maquinas Electricas VERANO 2018 Grupo BDocument20 pagesInstrumentacion de Maquinas Electricas VERANO 2018 Grupo BPedro Rosales Gutierrez0% (1)
- Conversor Ac DCDocument5 pagesConversor Ac DCFrancisco ZuñigaNo ratings yet
- Laboratorio 3 Electronica de Potencia 1Document13 pagesLaboratorio 3 Electronica de Potencia 1Manuel GonzalezNo ratings yet
- Control Clasico PDFDocument18 pagesControl Clasico PDFrodrigo sepulvedaNo ratings yet
- Metodo de EulerDocument4 pagesMetodo de EulerRolando ChangoNo ratings yet
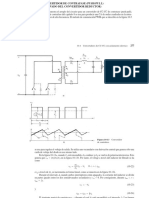
- Convertidor Contrafase (Push-Pull)Document3 pagesConvertidor Contrafase (Push-Pull)Rafael RivasNo ratings yet
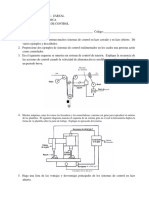
- Parcial I Control AnálogoDocument3 pagesParcial I Control AnálogoAnderson TrulloNo ratings yet
- Clase Practica Con Circuito NortonDocument4 pagesClase Practica Con Circuito NortonfranklinNo ratings yet
- Conexiones EspecialesDocument7 pagesConexiones EspecialesalejandroNo ratings yet
- Taller - Conceptos Basicos de ControlDocument2 pagesTaller - Conceptos Basicos de ControlJoan Manuel Moreno RojasNo ratings yet
- Teoria de Marco de ReferenciaDocument9 pagesTeoria de Marco de ReferenciaAlfredo Gil VelascoNo ratings yet
- Procesos ErgódicosDocument3 pagesProcesos ErgódicosEmily Tobar100% (2)
- Pasos para Sincronizar Un Alternador TrifásicoDocument4 pagesPasos para Sincronizar Un Alternador TrifásicoMaria TipantuñaNo ratings yet
- Proteccion de Lineas de TransmisiónDocument4 pagesProteccion de Lineas de TransmisiónjulienszNo ratings yet
- Estabilidad de FrecuenciaDocument3 pagesEstabilidad de FrecuenciaLizbeth VelascoNo ratings yet
- Metodo de La Burbuja en JavaDocument3 pagesMetodo de La Burbuja en Javapaula zambranoNo ratings yet
- Pu 01Document45 pagesPu 01Joseph MorenoNo ratings yet
- Laboratorio #3-SeñalesDocument5 pagesLaboratorio #3-SeñalesValentina PortillaNo ratings yet
- TAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Document15 pagesTAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Reiner Campos RequelmeNo ratings yet
- Sef Ee615m-N 2019-1Document7 pagesSef Ee615m-N 2019-1Jorge Luis Espinoza BardalesNo ratings yet
- Chat de WhatsApp Con IsabellaDocument10 pagesChat de WhatsApp Con Isabellafaber orlando100% (1)
- Tarea #2Document9 pagesTarea #2Helenis Macias GonzalezNo ratings yet
- Asignacion 2Document14 pagesAsignacion 2Sam EliasNo ratings yet
- Señales Elementales DiscretasDocument3 pagesSeñales Elementales DiscretasJesus Angel Aragon MoralesNo ratings yet
- Diseño de Controladores - Jesús Ángel Aragón MoralesDocument12 pagesDiseño de Controladores - Jesús Ángel Aragón MoralesJesus Angel Aragon MoralesNo ratings yet
- Practica ControlDocument4 pagesPractica ControlJesus Angel Aragon MoralesNo ratings yet
- HC SR04Document3 pagesHC SR04Jesus Angel Aragon Morales100% (1)
- Desplazamiento de Registros - MicrocontroladoresDocument8 pagesDesplazamiento de Registros - MicrocontroladoresJesus Angel Aragon MoralesNo ratings yet
- Compresores DinamicosDocument18 pagesCompresores DinamicosJesus Angel Aragon MoralesNo ratings yet
- Señaletica IndustrialDocument51 pagesSeñaletica IndustrialJesus Angel Aragon MoralesNo ratings yet
- TAREA1 Estatica 02 2018Document8 pagesTAREA1 Estatica 02 2018Miguel RodriguezNo ratings yet
- EHS-P-PN-S160-19 Instalacion de Piezómetro de Cuerda Vibrante. Rev.07Document13 pagesEHS-P-PN-S160-19 Instalacion de Piezómetro de Cuerda Vibrante. Rev.07Natalia Valentina Araya RamirezNo ratings yet
- Instituto Universitario Politecnico Santiago MariñoDocument3 pagesInstituto Universitario Politecnico Santiago MariñoFelipe Santiago Rincon100% (1)
- Circuitos-Basicos-De-Neumatica Ej1 Al 11Document11 pagesCircuitos-Basicos-De-Neumatica Ej1 Al 11Brandon DamianNo ratings yet
- Manual de Operacion y MantenimientoDocument2 pagesManual de Operacion y MantenimientoYIMY YANQUENo ratings yet
- Estudio Hidrologico San JuanCHINCHA 4Document282 pagesEstudio Hidrologico San JuanCHINCHA 4Arce MarcovichNo ratings yet
- Buenas Practicas de LaboratorioDocument11 pagesBuenas Practicas de LaboratorioClaudia Naomi Ventura OrtizNo ratings yet
- 2wire para ShareazaDocument5 pages2wire para Shareazasobera44No ratings yet
- Cálculo de AprovechamientoDocument1 pageCálculo de AprovechamientoMartuSalazar50% (2)
- Diseno Sismico de Estructuras Contenedoras de Liquidos Aci 350 3 01 y Comentarios 350 3r 01 Publicado Por Comite Aci 350 ContenidosDocument55 pagesDiseno Sismico de Estructuras Contenedoras de Liquidos Aci 350 3 01 y Comentarios 350 3r 01 Publicado Por Comite Aci 350 ContenidosshashopazmalNo ratings yet
- Mando Directo e Indirecto Regulación de Velocidad V2 PDFDocument17 pagesMando Directo e Indirecto Regulación de Velocidad V2 PDFRonald Cuenta MamaniNo ratings yet
- Construcción Con AdobeDocument35 pagesConstrucción Con AdobeEduar Delgado Santa Cruz100% (1)
- Fichas 2Document4 pagesFichas 2MegumiTrancyNo ratings yet
- TESIS CIV456 - Chi PDFDocument212 pagesTESIS CIV456 - Chi PDFflavioNo ratings yet
- Investigacion de OperDocument3 pagesInvestigacion de OperBrayan Enrique Prieto YagualNo ratings yet
- Informe Técnico (Rueda Dentada Seridme)Document7 pagesInforme Técnico (Rueda Dentada Seridme)Aura Milena Casseres RodriguezNo ratings yet
- Flecha AmarrilalaDocument4 pagesFlecha AmarrilalaRoberto Sanchez HerreraNo ratings yet
- DDFDocument4 pagesDDFMike KingNo ratings yet
- Aplicaciones de Los PLC en La IndustriaDocument9 pagesAplicaciones de Los PLC en La IndustriaOn Sale100% (1)
- Ejercicios Normal Log Normal 2Document1 pageEjercicios Normal Log Normal 2Pedro Suarez0% (1)
- Generador Electrico de Una Turbina EolicaDocument12 pagesGenerador Electrico de Una Turbina EolicaRuben Antonio Cisneros Prado100% (2)
- Examen de Explosivos y Perforacion y VoladuraDocument2 pagesExamen de Explosivos y Perforacion y VoladuraMiguel Correa BardalesNo ratings yet
- Etiquetado y Embalaje para La ExportacionDocument17 pagesEtiquetado y Embalaje para La Exportacionjon101276923No ratings yet
- Máquinas Hidráulicas 6Document7 pagesMáquinas Hidráulicas 6BRYANNo ratings yet
- Iperc Linea Base de IzajeDocument8 pagesIperc Linea Base de IzajeRaulNo ratings yet
- 1 - Naturaleza y Propiedades de Los FluidosDocument90 pages1 - Naturaleza y Propiedades de Los FluidosAlexis MerinoNo ratings yet
- OtroDocument27 pagesOtrosusana montero javierNo ratings yet
- Manual Excel Basico - 2016Document93 pagesManual Excel Basico - 2016Yolly Cosplay67% (3)
- 2021 590-125 Sistemas Electrotécnicos y Automáticos-1Document10 pages2021 590-125 Sistemas Electrotécnicos y Automáticos-1Alfonso Martos TorresNo ratings yet