You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Chase Bank StatementDocument4 pagesChase Bank StatementJoe SFNo ratings yet
- English Paper 1 Mark Scheme: Stage 9Document10 pagesEnglish Paper 1 Mark Scheme: Stage 9Hiede Rodil64% (14)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Group Process in The Philippine SettingDocument3 pagesGroup Process in The Philippine Settingthelark50% (2)
- Modification: Cut Boundary Absent in The Full ModelDocument4 pagesModification: Cut Boundary Absent in The Full Modeldeepak_dce_meNo ratings yet
- Automatically Change Load Step Settings in WB: © 2012 CAE AssociatesDocument6 pagesAutomatically Change Load Step Settings in WB: © 2012 CAE Associatesdeepak_dce_meNo ratings yet
- Transverse Plate-To-squarerectangular Hss ConnectionsDocument7 pagesTransverse Plate-To-squarerectangular Hss Connectionsdeepak_dce_meNo ratings yet
- SpaceClaim v19.0 ReleaseNotesDocument34 pagesSpaceClaim v19.0 ReleaseNotesdeepak_dce_meNo ratings yet
- 14 Chapter5Document51 pages14 Chapter5Anonymous P8Bt46mk5INo ratings yet
- Measuring Force On A Point Mass in ANSYS® Mechanical (Workbench)Document8 pagesMeasuring Force On A Point Mass in ANSYS® Mechanical (Workbench)deepak_dce_meNo ratings yet
- Stainless Steel FastenersDocument1 pageStainless Steel Fastenersdeepak_dce_meNo ratings yet
- Nasjonal Prove Engelsk 5 Trinn 2015Document23 pagesNasjonal Prove Engelsk 5 Trinn 2015deepak_dce_meNo ratings yet
- Bolt Toolkit Documentation V 1706Document19 pagesBolt Toolkit Documentation V 1706deepak_dce_meNo ratings yet
- Abaqus Tutorial Axi-Symmetric UpsettingDocument4 pagesAbaqus Tutorial Axi-Symmetric Upsettingdeepak_dce_meNo ratings yet
- Readme PDFDocument203 pagesReadme PDFdeepak_dce_meNo ratings yet
- Fujitsu Celsius h910Document101 pagesFujitsu Celsius h910roland_lasingerNo ratings yet
- Equine Infectious Diseases, 2nd Edition (VetBooks - Ir)Document930 pagesEquine Infectious Diseases, 2nd Edition (VetBooks - Ir)Dana UrueñaNo ratings yet
- Toshiba KCD-10 X-Ray - Installation ManualDocument18 pagesToshiba KCD-10 X-Ray - Installation Manualkizen_5100% (2)
- MA Tata Institute of Social Sciences Mumbai: Sardar SarovarDocument5 pagesMA Tata Institute of Social Sciences Mumbai: Sardar SarovarGauravNo ratings yet
- Slotine Li - Applied Nonlinear Control 31 53Document23 pagesSlotine Li - Applied Nonlinear Control 31 53Magdalena GrauNo ratings yet
- CarbohydratesDocument6 pagesCarbohydratesapi-308598460No ratings yet
- 11 - Past Simple Tense vs. Present PerfectDocument9 pages11 - Past Simple Tense vs. Present PerfectJosé SantosNo ratings yet
- Helmke - Slipring MotorsDocument16 pagesHelmke - Slipring MotorssanmaworkNo ratings yet
- A Kalman Filter Based Model For Asset Prices and Its Application To Portfolio OptimizationDocument8 pagesA Kalman Filter Based Model For Asset Prices and Its Application To Portfolio Optimizationزهير استيتوNo ratings yet
- CassendraDocument21 pagesCassendraNikhil Erande100% (1)
- Chapter 7 Tacoma Narrows BridgeDocument18 pagesChapter 7 Tacoma Narrows BridgeFernando SmithNo ratings yet
- Good For Construction: Approval by NCRTC QR CodeDocument1 pageGood For Construction: Approval by NCRTC QR CodeZaid HussainNo ratings yet
- 74 HCT 148Document11 pages74 HCT 148Merényi OszkárNo ratings yet
- TX 2017 PDFDocument265 pagesTX 2017 PDFSigit CahyoNo ratings yet
- A Level Entrepreneurship Revision Questions Based On Syllabus Phase 2Document18 pagesA Level Entrepreneurship Revision Questions Based On Syllabus Phase 2humpho45No ratings yet
- Physical Therapist As Critical InquirerDocument39 pagesPhysical Therapist As Critical InquirerMichels Garments S.H Nawaz Hosiery100% (1)
- Kec 553a Lab Manual DSP 20-21Document62 pagesKec 553a Lab Manual DSP 20-21sachinyadavv13No ratings yet
- UMCONF User ManualDocument35 pagesUMCONF User ManualMANUEL ALEJANDRO MANZANO PORTILLANo ratings yet
- Multiplexing With Arduino and The 74HC595Document17 pagesMultiplexing With Arduino and The 74HC595luberiesNo ratings yet
- Ice ScrambbleDocument15 pagesIce ScrambbleJay ArNo ratings yet
- DVS Technical Codes On Plastics Joining TechnologiesDocument11 pagesDVS Technical Codes On Plastics Joining Technologiesmarlon gutierrezNo ratings yet
- Interfacing RTC DS3231 With 8051 Microcontroller - Codrey ElectronicsDocument19 pagesInterfacing RTC DS3231 With 8051 Microcontroller - Codrey ElectronicsmcamhkNo ratings yet
- 8086 SubtractionDocument2 pages8086 SubtractionMahakaalNo ratings yet
- Cjmo 2023Document2 pagesCjmo 2023ferrousweiNo ratings yet
- CA3046Document6 pagesCA3046erdem10139No ratings yet
- Determination of Peak Hour RidershipDocument22 pagesDetermination of Peak Hour RidershipApoorva PrakashNo ratings yet
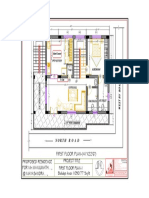
- Proposed Residence For MR - Manjunath..., at Mayasandra... ,: FIRST FLOOR PLAN - (41'X22'6'')Document1 pageProposed Residence For MR - Manjunath..., at Mayasandra... ,: FIRST FLOOR PLAN - (41'X22'6'')arya adeshNo ratings yet