You might also like
- Force Displacement Velocity AccelerationDocument4 pagesForce Displacement Velocity AccelerationjohnnyNo ratings yet
- Calcule L3 L 4 2003Document2 pagesCalcule L3 L 4 2003tomyclauNo ratings yet
- Calcule L3 L 4 2003Document2 pagesCalcule L3 L 4 2003tomyclauNo ratings yet
- Perhitungan Manual FixDocument8 pagesPerhitungan Manual Fixmuke gileNo ratings yet
- Latihan UtsDocument1 pageLatihan UtsIstiqomah Dini PratiwiNo ratings yet
- LatihanDocument12 pagesLatihanFariz Fh HidayatullahNo ratings yet
- C) Newton Raphson Desacoplado: Linea Inpedancia (Z) Admitancia SH/2 Admitancia R XDocument10 pagesC) Newton Raphson Desacoplado: Linea Inpedancia (Z) Admitancia SH/2 Admitancia R Xjhymmy espadaNo ratings yet
- 45nm Tech FileDocument5 pages45nm Tech FileControl Systems100% (1)
- Appendix-A: 45nm Fabrication Data .Model Nmos Nmos Level 54Document8 pagesAppendix-A: 45nm Fabrication Data .Model Nmos Nmos Level 54Vijaya ShekhawatNo ratings yet
- Margules Uniquac2Document12 pagesMargules Uniquac2Tias Faizatul MunirohNo ratings yet
- Member Length (m) Force (N) μ F.μ.L (N.m)Document2 pagesMember Length (m) Force (N) μ F.μ.L (N.m)Julaihie SabriNo ratings yet
- Nama: Aisyah Nurul Fatma NIM: 03031381722093 Kelas: ADocument2 pagesNama: Aisyah Nurul Fatma NIM: 03031381722093 Kelas: AAriqNo ratings yet
- NjhgyufdrysettDocument5 pagesNjhgyufdrysettPiyush Kumar100% (1)
- Kurva LN KD Vs 1/T: Waktu Jumlah Hidup % Hidup Jumlah Mati % Mati Total Nt/No LN Nt/NoDocument2 pagesKurva LN KD Vs 1/T: Waktu Jumlah Hidup % Hidup Jumlah Mati % Mati Total Nt/No LN Nt/NoRahmat DaniNo ratings yet
- Tugas 2 - Soal SikomDocument5 pagesTugas 2 - Soal Sikomnadia frizaNo ratings yet
- 15 Points) : Test 1: Time 100 Minutes NameDocument7 pages15 Points) : Test 1: Time 100 Minutes Nameimran_chaudhryNo ratings yet
- Copia de FisicaDocument12 pagesCopia de FisicaValentina Arias RengifoNo ratings yet
- Newmark From NetDocument4 pagesNewmark From NetGandhi HammoudNo ratings yet
- Force Displacement Velocity AccelerationDocument4 pagesForce Displacement Velocity AccelerationdavidNo ratings yet
- Force Displacement Velocity AccelerationDocument4 pagesForce Displacement Velocity Accelerationkaranbir123No ratings yet
- Wahyu Ardi SriDocument6 pagesWahyu Ardi Srifadli rijaldiNo ratings yet
- Formula StatistikDocument8 pagesFormula Statistikdosenteknologi farmasiNo ratings yet
- Syauqizaidan Khairan K - Kelas A - Latihan BackpropagationDocument4 pagesSyauqizaidan Khairan K - Kelas A - Latihan BackpropagationSYAUQIZAIDAN KHAIRAN KHALAFNo ratings yet
- CÁLCULOSP4Document19 pagesCÁLCULOSP4Paulina Yomar Muñoz AparicioNo ratings yet
- MTK ZiaDocument15 pagesMTK ZiaSamir RidhoNo ratings yet
- CalcuDocument4 pagesCalcumarkNo ratings yet
- Cristina 22200016 Tugas Latihan 6Document5 pagesCristina 22200016 Tugas Latihan 6CHARLES CHARITY SCORPIONONo ratings yet
- X EXP Serie Signo Serie Real Suma Error RelativoDocument8 pagesX EXP Serie Signo Serie Real Suma Error RelativoMargiori Supo PerezNo ratings yet
- Ge/Rtx1X2 Versus X1 Graph: 0.6 0.7 F (X) - 0.1566247204X + 0.6668560901 R 0.7438724523Document11 pagesGe/Rtx1X2 Versus X1 Graph: 0.6 0.7 F (X) - 0.1566247204X + 0.6668560901 R 0.7438724523Radhi AbdullahNo ratings yet
- Analisis CMD: y LN LN (1/R) Linear (Y LN LN (1/R) ) Column IDocument2 pagesAnalisis CMD: y LN LN (1/R) Linear (Y LN LN (1/R) ) Column IYen FisherNo ratings yet
- ZiyaArman 2020210090 Tugas5 Anstruk2Document3 pagesZiyaArman 2020210090 Tugas5 Anstruk2ziya armanNo ratings yet
- Taller No LinealDocument5 pagesTaller No LinealWENDY MARCELA WILCHES CANONNo ratings yet
- Problem 1 A. SW Power Law Model: PCVSSW Log PC Vs Log SWDocument2 pagesProblem 1 A. SW Power Law Model: PCVSSW Log PC Vs Log SWMostafa ElghifaryNo ratings yet
- Nilai A Sample 2023 (O3)Document10 pagesNilai A Sample 2023 (O3)Langganan AjaNo ratings yet
- Y=Ue X1 X2 X3 X4 Nr. exp.: h tab. 2.3 pt. n=5 si α = 0.025 h=1,72Document16 pagesY=Ue X1 X2 X3 X4 Nr. exp.: h tab. 2.3 pt. n=5 si α = 0.025 h=1,72Andrei DinicăNo ratings yet
- Module 5 ExcelDocument11 pagesModule 5 ExcelAkanksha NamanNo ratings yet
- X EXP Serie Signo Serie Real Suma Error RelativoDocument8 pagesX EXP Serie Signo Serie Real Suma Error RelativoMargiori Supo PerezNo ratings yet
- No P/Kpa X1 Y1 X2 Y2 Ɣ1 Ɣ2 LN (Ɣ1) LN (Ɣ2) Ge/Rt Ge/Rtx1X2Document1 pageNo P/Kpa X1 Y1 X2 Y2 Ɣ1 Ɣ2 LN (Ɣ1) LN (Ɣ2) Ge/Rt Ge/Rtx1X2Gladys ElvinaNo ratings yet
- Numeric Final ExamDocument29 pagesNumeric Final Examdesta mengeshaNo ratings yet
- Ejer 1Document5 pagesEjer 1Javier JoseNo ratings yet
- Q4 3ChEDocument6 pagesQ4 3ChEeiNo ratings yet
- F1G113078 UasDocument11 pagesF1G113078 UasSabanNo ratings yet
- Metodo UniquacDocument8 pagesMetodo Uniquacjhon paulNo ratings yet
- Trabajo Poritoc2 Nivels + 2 VigasDocument57 pagesTrabajo Poritoc2 Nivels + 2 VigasFERMIN CONDORI QUISPENo ratings yet
- Bisection Method ExmpleDocument6 pagesBisection Method ExmpletomuiNo ratings yet
- Deber U3Document24 pagesDeber U3Elge Nitales galindoNo ratings yet
- Bab Iv Data Dan Pembahasan 1. Sudut 11 DerajatDocument7 pagesBab Iv Data Dan Pembahasan 1. Sudut 11 DerajatAini FadilahNo ratings yet
- Kinetics Lab DataDocument3 pagesKinetics Lab DataDianna NomanimNo ratings yet
- 3D Rotacia IhlanDocument2 pages3D Rotacia IhlanRyan Goh Chuang HongNo ratings yet
- 3D Rotacia IhlanDocument2 pages3D Rotacia IhlanRyan Goh Chuang HongNo ratings yet
- Curva de RemanzoDocument15 pagesCurva de Remanzokebler kevNo ratings yet
- Pcal Xe Psat X e PsatDocument3 pagesPcal Xe Psat X e PsatRAMOS OLLACHICA MARYORI JENNIFERNo ratings yet
- Name3150f17 23 PropseriesandselectionDocument91 pagesName3150f17 23 PropseriesandselectionJose FranciscoNo ratings yet
- Total Result 1 1 1 1 1 1 1 1 Total Result 4 4 8Document4 pagesTotal Result 1 1 1 1 1 1 1 1 Total Result 4 4 8Namratha Ganesh NambiarNo ratings yet
- Forward (Maju) : No VD ID e VT ISDocument2 pagesForward (Maju) : No VD ID e VT ISReinaldi AkbarNo ratings yet
- Nilai A Sample 2023 (NO)Document10 pagesNilai A Sample 2023 (NO)Langganan AjaNo ratings yet
- Mf2 104216021 Salman DirectmethodDocument4 pagesMf2 104216021 Salman DirectmethodSalman LahmadiNo ratings yet
- AyeuDocument12 pagesAyeunguyenleduchoang1213No ratings yet
- Termo Bu YuniDocument5 pagesTermo Bu YuniCelvin DickyNo ratings yet
- KKNI II Nautika Kapal NiagaDocument16 pagesKKNI II Nautika Kapal NiagaSonalitaWigunaNo ratings yet
- Lab Safety: Insert Your Name HereDocument8 pagesLab Safety: Insert Your Name HereSonalitaWigunaNo ratings yet
- QWERTYUFDocument4 pagesQWERTYUFSonalitaWigunaNo ratings yet
- Pilihlah Jawaban Yang Paling Benar Dengan Memberikan Tanda Silang (X) Pada Salah Satu Huruf A, B, C, D, Atau E Pada Lembar Jawaban !Document5 pagesPilihlah Jawaban Yang Paling Benar Dengan Memberikan Tanda Silang (X) Pada Salah Satu Huruf A, B, C, D, Atau E Pada Lembar Jawaban !SonalitaWigunaNo ratings yet
- Surat Permohonan Data Phou Nan ChouDocument1 pageSurat Permohonan Data Phou Nan ChouSonalitaWigunaNo ratings yet
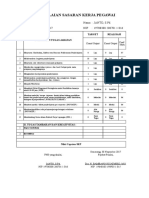
- Penilaian Sasaran Kerja PegawaiDocument2 pagesPenilaian Sasaran Kerja PegawaiSonalitaWigunaNo ratings yet
- Epoch x1 x2 Bias Target Output Delta - w1 Delta - w2 Delta - BDocument2 pagesEpoch x1 x2 Bias Target Output Delta - w1 Delta - w2 Delta - BSonalitaWigunaNo ratings yet
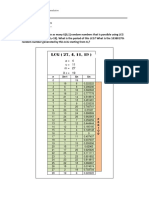
- X: Yang Ditolak O: Yang Dipilih Jumlah Data: 30Document6 pagesX: Yang Ditolak O: Yang Dipilih Jumlah Data: 30SonalitaWigunaNo ratings yet
- Puisi Bahasa InggrisDocument1 pagePuisi Bahasa InggrisSonalitaWiguna100% (2)
- Start: Input Nilaikg, G, OnsDocument5 pagesStart: Input Nilaikg, G, OnsSonalitaWigunaNo ratings yet