You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Laptop Motherboard Power On DetailDocument73 pagesLaptop Motherboard Power On Detailvinu100% (4)
- FSSA Guide To Estimating Pressure Relief Vent Area 2 EditionDocument1 pageFSSA Guide To Estimating Pressure Relief Vent Area 2 EditionLaura Galarza100% (1)
- Testing and Commissioning For Cooling TowerDocument6 pagesTesting and Commissioning For Cooling TowerDong VanraNo ratings yet
- Water Is A Chemical Compound With The Chemical Formula HDocument5 pagesWater Is A Chemical Compound With The Chemical Formula HHarsh WaliaNo ratings yet
- Personal: StrengthDocument6 pagesPersonal: StrengthHarsh WaliaNo ratings yet
- Thermal EquilibriumDocument9 pagesThermal EquilibriumHarsh WaliaNo ratings yet
- Ammonia ProductionDocument5 pagesAmmonia ProductionHarsh WaliaNo ratings yet
- Iit-Jee Result: Available Here.Document1 pageIit-Jee Result: Available Here.Harsh WaliaNo ratings yet
- Cover & Jalandhar Ms HSD Price BidDocument6 pagesCover & Jalandhar Ms HSD Price BidHarsh WaliaNo ratings yet
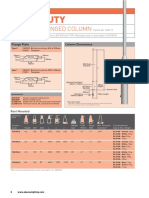
- Light Duty: 4-8M Base Hinged ColumnDocument3 pagesLight Duty: 4-8M Base Hinged ColumnAbrar AhmadNo ratings yet
- Exchange 2013 DAG With Dynamic QuorumDocument6 pagesExchange 2013 DAG With Dynamic QuorumSageNo ratings yet
- CSAT, SSC, IBPS Test PaperDocument3 pagesCSAT, SSC, IBPS Test PapersmargeduNo ratings yet
- Sample Short Circuit CalculationDocument5 pagesSample Short Circuit CalculationAli Aykut100% (1)
- CV RNDocument206 pagesCV RNyiyitusoNo ratings yet
- Chapter 4 Professor YDocument15 pagesChapter 4 Professor YLê Đình VươngNo ratings yet
- IET Wiring Regulations (BS 7671:2008+A3:2015) - SECTION 702 SWIMMING Pools and Other BasinsDocument7 pagesIET Wiring Regulations (BS 7671:2008+A3:2015) - SECTION 702 SWIMMING Pools and Other BasinsBrandon LevineNo ratings yet
- Project Documentation: File: Examen - Project Date: 16/06/2021 Profile: Codesys V3.5 Sp17Document9 pagesProject Documentation: File: Examen - Project Date: 16/06/2021 Profile: Codesys V3.5 Sp17Luis SalasNo ratings yet
- 06 Introduction To Investment ABM BF12 IVm N 25Document32 pages06 Introduction To Investment ABM BF12 IVm N 25jcxes Del rosario100% (2)
- DualDrive Ins E 12 02 PDFDocument22 pagesDualDrive Ins E 12 02 PDFMihai CorbuNo ratings yet
- Statexer#5Document6 pagesStatexer#5Ghost31No ratings yet
- Surveying by Jaspal SirDocument57 pagesSurveying by Jaspal SirLimpidNo ratings yet
- Body Voided SlabDocument56 pagesBody Voided SlabShivendra KumarNo ratings yet
- Brochure 20181002045400Document10 pagesBrochure 20181002045400M SukmanegaraNo ratings yet
- Bagas Ari Nugroho Skema Jaringan Warnet Dan ModemDocument18 pagesBagas Ari Nugroho Skema Jaringan Warnet Dan ModemAgung Agil SaputraNo ratings yet
- The Development of A Teachers Self Efficacy Instrument For High School Physical Education TeacherDocument6 pagesThe Development of A Teachers Self Efficacy Instrument For High School Physical Education Teachercoroline0% (1)
- 608 Us Toolox Toolox Dimensional RangeDocument2 pages608 Us Toolox Toolox Dimensional RangeFernanda AndradeNo ratings yet
- Number Theory at 2018Document17 pagesNumber Theory at 2018Michele NardelliNo ratings yet
- Physico Chem Properties and PreformulationDocument44 pagesPhysico Chem Properties and PreformulationIna WidiaNo ratings yet
- Motion Summary NotesDocument4 pagesMotion Summary NotesBethanyLeiseNo ratings yet
- Axisymmetric ProblemsDocument41 pagesAxisymmetric ProblemsAVINASH CHAVANNo ratings yet
- Potentials of Enzyme Enhanced Oil Recovery: A ReviewDocument13 pagesPotentials of Enzyme Enhanced Oil Recovery: A ReviewIbrahim SalahudinNo ratings yet
- KX-MB271, KX-MB781 - SMDocument293 pagesKX-MB271, KX-MB781 - SMAna Lorena SalvatierraNo ratings yet
- UniDac Update MultiDocument10 pagesUniDac Update Multianon_660430481No ratings yet
- MIT8 03SCF16 PracticeFinalExam1Document15 pagesMIT8 03SCF16 PracticeFinalExam1Gavin BirlaNo ratings yet
- Fisher R 3582 and 3582i Positioners, 582i Electro Pneumatic Converter, and 3583 Valve Stem Position TransmitterDocument56 pagesFisher R 3582 and 3582i Positioners, 582i Electro Pneumatic Converter, and 3583 Valve Stem Position TransmitterĐàoXuânLiêmNo ratings yet
- Rej 603 - B524 PDFDocument9 pagesRej 603 - B524 PDFkra_amNo ratings yet