You might also like
- Radio Stations: Installation, Design and PracticeFrom EverandRadio Stations: Installation, Design and PracticeRating: 5 out of 5 stars5/5 (2)
- Geometric Design of Highways LectureDocument171 pagesGeometric Design of Highways LectureSudipThapa100% (1)
- Radar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar UsersFrom EverandRadar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar UsersRating: 4.5 out of 5 stars4.5/5 (6)
- In The Name of Allah, The Most Gracious, The Most MercifulDocument54 pagesIn The Name of Allah, The Most Gracious, The Most MercifulIthihas Seventyone100% (1)
- Railroad Track Mechanics and Technology: Proceedings of a Symposium Held at Princeton University, April 21 - 23, 1975From EverandRailroad Track Mechanics and Technology: Proceedings of a Symposium Held at Princeton University, April 21 - 23, 1975Arnold D. KerrRating: 5 out of 5 stars5/5 (1)
- Measuring Diaphragm Wall Deflection with Shape Accel ArraysDocument22 pagesMeasuring Diaphragm Wall Deflection with Shape Accel Arraysdirafly3566No ratings yet
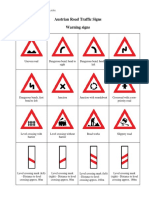
- Austria Road Traffic SignsDocument12 pagesAustria Road Traffic Signsmj sa100% (1)
- Government For Everybody TextDocument528 pagesGovernment For Everybody TextAlMostafaNo ratings yet
- Mooring Line Management SNAME 1994Document8 pagesMooring Line Management SNAME 1994Peyman MznNo ratings yet
- Finding the Most Feasible Railroad RouteDocument113 pagesFinding the Most Feasible Railroad RouteChristineNo ratings yet
- Highway Design Manual Qatar PDFDocument254 pagesHighway Design Manual Qatar PDFJazper YdioNo ratings yet
- Ultimate Driving School Leeds Lessons HandoutDocument50 pagesUltimate Driving School Leeds Lessons HandoutStephen Dieseruvwe67% (3)
- G.R. No. 172778 Reckless ImprudenceDocument8 pagesG.R. No. 172778 Reckless ImprudenceLsj ClimNo ratings yet
- Joana ThesisDocument85 pagesJoana ThesisJamie HaravataNo ratings yet
- SNAME 2008 Speed-Power PerformanceDocument7 pagesSNAME 2008 Speed-Power PerformancePriyo Susanto100% (1)
- Risk Assessment Waterproofing p214 SMDocument4 pagesRisk Assessment Waterproofing p214 SMMajaga MabhenaNo ratings yet
- Australean Guidelines For Road Network Condition Monitoring Part 3 - Pavement StrengthDocument86 pagesAustralean Guidelines For Road Network Condition Monitoring Part 3 - Pavement Strengthaskarah100% (2)
- Hasil Test Pit: Jenis Tebal (CM) Jenis Tebal (CM)Document21 pagesHasil Test Pit: Jenis Tebal (CM) Jenis Tebal (CM)Yosep Agung PurnomoNo ratings yet
- ORN 40 Measurement of Axle LoadsDocument26 pagesORN 40 Measurement of Axle LoadsMichaelNo ratings yet
- Axle Load SurveyDocument3 pagesAxle Load SurveyExecutive EngineerNo ratings yet
- Behaviour of articulated vehicles on curves and roll stability analysisDocument7 pagesBehaviour of articulated vehicles on curves and roll stability analysisSPIN2018No ratings yet
- Csy On Grass and Gravel Bartlett 2009Document9 pagesCsy On Grass and Gravel Bartlett 2009andrewb2005No ratings yet
- On Dynamic Weighing of Highway Vehicles in Motion: September 2003Document9 pagesOn Dynamic Weighing of Highway Vehicles in Motion: September 2003JonasHirataNo ratings yet
- Slop Variancepdf PDFDocument12 pagesSlop Variancepdf PDFHuda MahdiNo ratings yet
- Jmse 05 00025 v2Document16 pagesJmse 05 00025 v2Sam ShresthaNo ratings yet
- Real-time haul road monitoring using Bayesian regressionDocument15 pagesReal-time haul road monitoring using Bayesian regressionDavid Esteban Meneses RendicNo ratings yet
- Proposed technique for estimating capacity and level of service of major freeway weaving sectionsDocument11 pagesProposed technique for estimating capacity and level of service of major freeway weaving sectionsIsaac saenzNo ratings yet
- Airport Pavement Roughness With NighttimDocument10 pagesAirport Pavement Roughness With NighttimdhruNo ratings yet
- Evaluation of Computation Methods For Accelerometer-Established Inertial Profiling Reference SystemsDocument10 pagesEvaluation of Computation Methods For Accelerometer-Established Inertial Profiling Reference Systemssyed sardar hussain shahNo ratings yet
- Noureldin Et Al 2003 Network Pavement Evaluation With Falling Weight Deflectometer and Ground Penetrating RadarDocument10 pagesNoureldin Et Al 2003 Network Pavement Evaluation With Falling Weight Deflectometer and Ground Penetrating Radarsaksham dixitNo ratings yet
- AXLELOADSURVEYcasestudyfor BenghazilibyaDocument20 pagesAXLELOADSURVEYcasestudyfor BenghazilibyaABDIRAHMANNo ratings yet
- Speed Survey Methods for Traffic EngineersDocument10 pagesSpeed Survey Methods for Traffic EngineersMesfin DerbewNo ratings yet
- Merlin PDFDocument7 pagesMerlin PDFMehna MathewNo ratings yet
- 1 - 270 - RR301 - MERLIN Low-Cost Road Roughness Measuring DeviceDocument25 pages1 - 270 - RR301 - MERLIN Low-Cost Road Roughness Measuring DeviceJuan Daniel Rojas Palma100% (1)
- Cover SheetDocument18 pagesCover Sheetzaheer0406No ratings yet
- Research Article: Evaluation of Rutting Performance of Asphalt Mixture With Driving Wheel Pavement AnalyzerDocument11 pagesResearch Article: Evaluation of Rutting Performance of Asphalt Mixture With Driving Wheel Pavement AnalyzerNasimNo ratings yet
- 1195 011 PDFDocument12 pages1195 011 PDFBetzy SuquilloNo ratings yet
- SPE 26774 Pipeline Freespan Evaluation: A New MethodologyDocument10 pagesSPE 26774 Pipeline Freespan Evaluation: A New MethodologycmkohNo ratings yet
- ARRB Roughometer III BrochureDocument2 pagesARRB Roughometer III Brochurejl_zaga19No ratings yet
- Weigh in Motion Technology - Economics and Performance Presented at NATMEC '98 Charlotte, North Carolina Presented by Andrew J. PrattDocument7 pagesWeigh in Motion Technology - Economics and Performance Presented at NATMEC '98 Charlotte, North Carolina Presented by Andrew J. PrattView Computer EngineeringNo ratings yet
- Applied SciencesDocument17 pagesApplied SciencesNicolas Rojas BarriosNo ratings yet
- Comparing Rutting PerformanceDocument20 pagesComparing Rutting Performanceskhan247No ratings yet
- Travel Quality Assessment of Urban Roads Based On International Roughness IndexDocument10 pagesTravel Quality Assessment of Urban Roads Based On International Roughness Indexsazwan2No ratings yet
- Developing A New Bridge Live Load Model For South AfricaDocument6 pagesDeveloping A New Bridge Live Load Model For South AfricatevredeNo ratings yet
- 1 s2.0 S2352146516300291 MainDocument9 pages1 s2.0 S2352146516300291 MainyusranNo ratings yet
- OMAE2015-41691: Comparison of Aqwa, GL Rankine, Moses, Octopus, Pdstrip and Motions in Shallow WaterDocument10 pagesOMAE2015-41691: Comparison of Aqwa, GL Rankine, Moses, Octopus, Pdstrip and Motions in Shallow WaterSATHYANARAYANAN V KNo ratings yet
- Fleet Monitoring Using Sensors in Passing VehiclesDocument10 pagesFleet Monitoring Using Sensors in Passing VehiclesNqtmquin NtqmquinNo ratings yet
- Merlin Road Roughness Machine User GuideDocument18 pagesMerlin Road Roughness Machine User GuidePablo José Farfan GuerreroNo ratings yet
- Computer Simulation Studies To Assist in Mine Equipment SelectionDocument5 pagesComputer Simulation Studies To Assist in Mine Equipment SelectionAnonymous wdaEo9kNo ratings yet
- The International Road Roughness Experiment: A Basis For Establishing A Standard Scale For Road Roughness MeasurementsDocument10 pagesThe International Road Roughness Experiment: A Basis For Establishing A Standard Scale For Road Roughness Measurementskenyi jamesNo ratings yet
- Nic Olsen 2017Document26 pagesNic Olsen 2017chandanNo ratings yet
- WIMpaper Anonymous Revised v2Document23 pagesWIMpaper Anonymous Revised v2Syria MostakNo ratings yet
- Distress Identification Cost Analysis and PavementDocument10 pagesDistress Identification Cost Analysis and PavementOMAR MSHALANo ratings yet
- Report Design StandardDocument55 pagesReport Design StandardWisit BestNo ratings yet
- Trimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVDocument56 pagesTrimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVMuhammad Yasar JavaidNo ratings yet
- Dot 2417 DS1Document171 pagesDot 2417 DS1CHRISTIAN LEANDRO DIAZ MARTINEZNo ratings yet
- E Ciency Measurement of Selected Australian and Other International Ports Using Data Envelopment AnalysisDocument16 pagesE Ciency Measurement of Selected Australian and Other International Ports Using Data Envelopment AnalysisHarish SrinivasanNo ratings yet
- Bycicle RoundaboutsDocument180 pagesBycicle RoundaboutsJuarez Paulo Calvi FilhoNo ratings yet
- Optimal Design of Container Terminal Layout: 1 Background and MotivationDocument11 pagesOptimal Design of Container Terminal Layout: 1 Background and MotivationIrving Ruiz EspinozaNo ratings yet
- Driven Newsletter91Document8 pagesDriven Newsletter91Franco FerreroNo ratings yet
- Is.14785.2000 - Coast Down Test PDFDocument12 pagesIs.14785.2000 - Coast Down Test PDFVenkata NarayanaNo ratings yet
- Appendix Ear RB TR Quad Axle ReportDocument40 pagesAppendix Ear RB TR Quad Axle Reportpkpnitian_152297088No ratings yet
- S55 - Intelligent Compaction in Louisiana - LTC2013Document52 pagesS55 - Intelligent Compaction in Louisiana - LTC2013walaywan100% (1)
- Reutov 2017 IOP Conf. Ser. Earth Environ. Sci. 87 082041Document7 pagesReutov 2017 IOP Conf. Ser. Earth Environ. Sci. 87 082041Dea Asrini Mas'udNo ratings yet
- Examining the Impact of Large Freight Vehicles on Signalised IntersectionsDocument10 pagesExamining the Impact of Large Freight Vehicles on Signalised IntersectionskannasrkNo ratings yet
- 1 Airport 1Document12 pages1 Airport 1Mercury LTNo ratings yet
- Experimental Monitoring of The Humber Bridge UsingDocument7 pagesExperimental Monitoring of The Humber Bridge Using정주호No ratings yet
- Nonlinear Input-Shaping Controller For Q20160320-8536-10xvh06Document22 pagesNonlinear Input-Shaping Controller For Q20160320-8536-10xvh06Mohammed MohammedNo ratings yet
- Motor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12From EverandMotor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12No ratings yet
- Aics in Cs 22sept2017Document4 pagesAics in Cs 22sept2017Yosep Agung PurnomoNo ratings yet
- REVISI Penamaan BorholeDocument11 pagesREVISI Penamaan BorholeYosep Agung PurnomoNo ratings yet
- 1 PBDocument13 pages1 PBMickaelNo ratings yet
- Smart Cities: Traffic Data Monitoring Over Iot For Easy Transportation/Alternative Route SelectionDocument3 pagesSmart Cities: Traffic Data Monitoring Over Iot For Easy Transportation/Alternative Route Selectionhamed razaNo ratings yet
- Z-E2015 Main Navi FeaturesDocument4 pagesZ-E2015 Main Navi FeaturesMatrixTMNo ratings yet
- Alan Winfield - Interview TranscriptDocument13 pagesAlan Winfield - Interview TranscriptJoon JangNo ratings yet
- Environmental Noise Management ManualDocument219 pagesEnvironmental Noise Management ManualFarucco100% (1)
- Compiled Po Na SinusurethigDocument64 pagesCompiled Po Na Sinusurethigselmareynaldo29No ratings yet
- Benelli TNT 1130 Sport - User Maintenance ManualDocument52 pagesBenelli TNT 1130 Sport - User Maintenance ManualdanielsscribdNo ratings yet
- PEARSONDocument5 pagesPEARSONangela0% (1)
- Road Designs That Contributes To Road AccidentsDocument18 pagesRoad Designs That Contributes To Road AccidentsNoises Of LoveNo ratings yet
- A Proposed Bridge Widening Project in Matina CrossingDocument9 pagesA Proposed Bridge Widening Project in Matina CrossingRGDayananNo ratings yet
- Chap 2 Road ClassificationsDocument5 pagesChap 2 Road ClassificationsIris Kayte Huesca EvicnerNo ratings yet
- Draft 1Document8 pagesDraft 1Bblou CastañosNo ratings yet
- Forest Service Manual National Headquarters (Wo) Washington, DCDocument48 pagesForest Service Manual National Headquarters (Wo) Washington, DCElisha WankogereNo ratings yet
- PK 24 - Bustos Transport Code Excerpts)Document56 pagesPK 24 - Bustos Transport Code Excerpts)fernan tadeoNo ratings yet
- Traffic Engineering Studies: (C) 2009 Cengage Learning ALL RIGHTS RESERVED. 41Document12 pagesTraffic Engineering Studies: (C) 2009 Cengage Learning ALL RIGHTS RESERVED. 41Hadhi Hassan KhanNo ratings yet
- Design of FPGA-based Traffic Light Controller System: June 2011Document6 pagesDesign of FPGA-based Traffic Light Controller System: June 2011korsairNo ratings yet
- Part 1080 Rail SignallingDocument10 pagesPart 1080 Rail SignallingThieyrra Alham0% (1)
- RSTA ADEPT Guide to Best Practice for High Friction Road SurfacesDocument25 pagesRSTA ADEPT Guide to Best Practice for High Friction Road Surfacesyash_monu05No ratings yet
- Intelligent Traffic Management SystemDocument2 pagesIntelligent Traffic Management SystemSidharthNo ratings yet
- Automated Traffic ControllerDocument42 pagesAutomated Traffic ControllerVaishali PandeyNo ratings yet
- Contekan Maintain NavigationDocument9 pagesContekan Maintain NavigationobhetzNo ratings yet
- Gta Vice City CodesDocument5 pagesGta Vice City CodesScribNo ratings yet
- English NotesDocument39 pagesEnglish NotesManoj BhoviNo ratings yet