You might also like
- Calibracion de Cronometros DigitalesDocument28 pagesCalibracion de Cronometros DigitalesMeyler Villalobos BravoNo ratings yet
- Dibujo Elementos Roscados (NTC1993)Document0 pagesDibujo Elementos Roscados (NTC1993)danielgothicNo ratings yet
- Cobiscorp Catalogo 1Document16 pagesCobiscorp Catalogo 1Nestor DepablosNo ratings yet
- Curso Certificación ADOS 2 INDEB, Dra Amaia HeDocument4 pagesCurso Certificación ADOS 2 INDEB, Dra Amaia HeIsabel Valentina Palma LetelierNo ratings yet
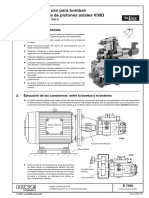
- Instrucciones de Uso para Bombas de Caudal Variable de Pistones Axiales v30dDocument20 pagesInstrucciones de Uso para Bombas de Caudal Variable de Pistones Axiales v30dRogger Benites GrausNo ratings yet
- Virus Hack - Redes Neuronales, Conceptos Básicos y AplicacionesDocument55 pagesVirus Hack - Redes Neuronales, Conceptos Básicos y AplicacionesjudasnakeNo ratings yet
- RaresrfDocument22 pagesRaresrfRogger Benites GrausNo ratings yet
- RaresrfDocument22 pagesRaresrfRogger Benites GrausNo ratings yet
- InfoDocument3 pagesInfoRogger Benites GrausNo ratings yet
- Ministerio de La ProduccionDocument10 pagesMinisterio de La ProduccionRogger Benites GrausNo ratings yet
- Matrix Rogger 1Document2 pagesMatrix Rogger 1Rogger Benites GrausNo ratings yet
- Lab 1 RoboticaDocument5 pagesLab 1 RoboticaRogger Benites GrausNo ratings yet
- Paginas Referentes A CalderasDocument1 pagePaginas Referentes A CalderasRogger Benites GrausNo ratings yet
- Filo SofiaDocument2 pagesFilo SofiaRogger Benites GrausNo ratings yet
- Amplificador Con Mosfet para Motor DCDocument2 pagesAmplificador Con Mosfet para Motor DCRogger Benites GrausNo ratings yet
- Utp-Lab-Curva-B H C 27765Document4 pagesUtp-Lab-Curva-B H C 27765johanNo ratings yet
- Trabajo Autonomo Reflexivo 02Document4 pagesTrabajo Autonomo Reflexivo 02Rogger Benites GrausNo ratings yet
- Trabajo de Practica Redes inDocument13 pagesTrabajo de Practica Redes inRogger Benites GrausNo ratings yet
- ProcesamientodeImagenesyVisionArtificial SilabussDocument5 pagesProcesamientodeImagenesyVisionArtificial SilabussRogger Benites GrausNo ratings yet
- Back Us SsssssDocument11 pagesBack Us SsssssRogger Benites GrausNo ratings yet
- Senosor de OxigenoDocument4 pagesSenosor de OxigenoRogger Benites GrausNo ratings yet
- Laboratorio 1 Electronica AnalogicaDocument6 pagesLaboratorio 1 Electronica AnalogicaRogger Benites GrausNo ratings yet
- Regionalizacion Administracion PublicaDocument4 pagesRegionalizacion Administracion PublicaRogger Benites GrausNo ratings yet
- SistemasHidraulicosyNeumaticos SilabussDocument3 pagesSistemasHidraulicosyNeumaticos SilabussRogger Benites GrausNo ratings yet
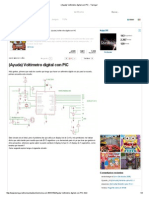
- (Ayuda) Voltimetro Digital Con PIC - Taringa!Document3 pages(Ayuda) Voltimetro Digital Con PIC - Taringa!Andres CamachoiNo ratings yet
- Proxy Filtro ContenidoDocument16 pagesProxy Filtro ContenidoAlvaro Osvaldo XitumulNo ratings yet
- Propuesta Comercial Eipol ST paraDocument5 pagesPropuesta Comercial Eipol ST paraPeliculas de EstrenoNo ratings yet
- Adiccion A Las Redes Sociales - Taller de Inv IIDocument53 pagesAdiccion A Las Redes Sociales - Taller de Inv IILilyPT100% (2)
- Planificacion de Clase XXXDocument2 pagesPlanificacion de Clase XXXesterNo ratings yet
- Actividad 3.3 - Practica de Mecanizado en Torno CNC - CuevasMagañaJuanJoseDocument8 pagesActividad 3.3 - Practica de Mecanizado en Torno CNC - CuevasMagañaJuanJosePABLO ALFONSO CAMPOS MATANo ratings yet
- Guía - de - Laboratorio 1 (PRACTICA 1 Y 2)Document13 pagesGuía - de - Laboratorio 1 (PRACTICA 1 Y 2)MäryPälítäNo ratings yet
- Responsabilidad Del Ingeniero en ElectrónicaDocument3 pagesResponsabilidad Del Ingeniero en ElectrónicaAarón Regalado RosasNo ratings yet
- Cooper Heat 1 PDFDocument2 pagesCooper Heat 1 PDFfelipeNo ratings yet
- Notas de La Versión de Forefront TMG 2010 RTMDocument256 pagesNotas de La Versión de Forefront TMG 2010 RTMlibroscela100% (1)
- Componentes Del SimDocument18 pagesComponentes Del SimJulio RodríguezNo ratings yet
- Tarea 1 FonoaudiologiaDocument3 pagesTarea 1 FonoaudiologiaCarlos AlvaradoNo ratings yet
- Laboratorio 2 Mci MunaresDocument26 pagesLaboratorio 2 Mci MunaresLuis CondoNo ratings yet
- Curso Práctico Sobre Microcontroladores, Tomo II - ProgramaciónDocument169 pagesCurso Práctico Sobre Microcontroladores, Tomo II - ProgramaciónJoseElias100% (2)
- CV IvanDocument3 pagesCV IvanLuis Lopez ReynaNo ratings yet
- SeñalizacionDocument71 pagesSeñalizacionBorjaGuzmanBlancoNo ratings yet
- Dewalt Herramientas ElectricasDocument25 pagesDewalt Herramientas ElectricasPaula BermudezNo ratings yet
- Programa ELABORACIÓN DE ALIMENTOS BALANCEADOS PARA ANIMALESDocument3 pagesPrograma ELABORACIÓN DE ALIMENTOS BALANCEADOS PARA ANIMALESarnold Andrés herrera merlanoNo ratings yet
- Piad-312 FormatoalumnotrabajofinalDocument9 pagesPiad-312 FormatoalumnotrabajofinalCristian Aldo Amaro arizapanaNo ratings yet
- Que Es Una Presentación InteractivaDocument3 pagesQue Es Una Presentación InteractivaJoyasCentroamerica71% (7)
- Benchmarking en InformaticaDocument10 pagesBenchmarking en InformaticaJohan ArangoNo ratings yet
- Taller 3 - Tablero de Control de Un Compresor Estacionario (Parte II) .Document3 pagesTaller 3 - Tablero de Control de Un Compresor Estacionario (Parte II) .Gerardo Alexander Tapia MayhuireNo ratings yet
- Indice y Tabla de IlustracionesDocument18 pagesIndice y Tabla de IlustracionesemelendrNo ratings yet
- Instalaciones Eléctricas y Sistemas: Francisco Escamilla LlanoDocument15 pagesInstalaciones Eléctricas y Sistemas: Francisco Escamilla LlanoHumberto CárdenasNo ratings yet
- Aplicar La Ley de KirchhoffDocument3 pagesAplicar La Ley de KirchhoffReina Andrea Hualpa NachoNo ratings yet
- Metodología en El Diseño de La Matriz FODADocument19 pagesMetodología en El Diseño de La Matriz FODADaniel M.FNo ratings yet