Professional Documents
Culture Documents
Ecuaciones de Movimiento Sistemas Multigrádos
Uploaded by
Ricardo H RochaOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ecuaciones de Movimiento Sistemas Multigrádos
Uploaded by
Ricardo H RochaCopyright:
Available Formats
Dinmica de las Estructuras (S-08) - Sistemas de Varios Grados de Libertad:
Ecuaciones de Movimiento y Planteamiento del Problema
M.I. Carlos Villaseor M.
Ecuacin de Movimiento
Para comenzar nuestro anlisis consideraremos un sistema discretizado en dos grados de libertad. Dadas las excitaciones por
cada nivel podemos establecer las ecuaciones de equilibrio, numerando con "j" cada grado de libertad :
p ( t) fS fD = ms u'' ms u'' fS fD = p ( t)
j j j j j j j j j j
expresando en forma matricial
Para el sistema de 2 G.L. la respuesta estar
definida por un sistemas de ecuaciones ms u'' fS fD = p ( t) ms 0 u'' fD fS p ( t) 1
diferenciales ordinarias en donde cada grado 1 1 1 1 1 1 1
1
1 =
de libertad est en funcin del otro o bien es 0 ms u'' fD fS p ( t)
ms u'' fS fD = p ( t) 2 2 2 2 2
afectado por el otro, se dice entonces que el 2 2 2 2 2
sistema est acoplado y debe resolverse de
forma simultnea
Para las fuerzas de amortiguamiento Para las fuerzas elsticas
fD c1 u' 1 c2 u' 2 u' 1 c1 c2 c2 u' 1 fS k u 1 k2 u 2 u 1 k1 k2 k2 u 1
1 = =
1 =
1 =
fD c2 u 2 u 1 c2 c1 u' 2 fS k u u k2 k1 u 2
2 2 2 2 1
Sustituyendo todo tenemos la siguiente expresin matricial:
ms 0 u'' k1 k2 k2 u 1 c1 c2 c2 u' 1 p ( t) 1
1 1
= Ms U'' C U' K U = P( t)
0 ms u'' k2 k1 u 2 c2 c1 u' 2 p ( t)
2 2 2
Matriz de Rigidez
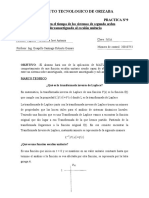
Ejemplo 1.
Formule la ecuacin de movimiento para el marco de dos niveles, considere que la rigidez de las vigas es infinita.
m1 = 2ms m2 = ms
Pg.- 1 07/06/2016 14:09
2.ms 0 c1 c2 c2
Ms U'' C U' K U = P( t) MS = C=
0 ms c2 c1
Para la rigidez al igual que la rigidez en los
sistemas de 1G.L., es la rigidez que relaciona las
fuerzas laterales con los desplazamiento en
dichas direccin
2 12 E ( 2I) 2 12 E I 72 E I
3
fS1 h3 h h3
= =
fS2 12 E I
2 24 E I
3 h3
h
72 E I 24 E I
h3 h
3
KLat =
24 E I 24 E I
h3 3
h
2 12 E I 24 E I
fS1 h3 h3
= =
fS2
2 12 E 2 I 24 E I
h3 h3
72 E I 24 E I
ms 0 u'' h3 3 u 1 c1 c2 c2 u' 1 p ( t) 1
1 1
h =
0
ms u'' 24 E I 24 E I u 2
c2 c1 u' 2 p ( t)
2 2 2
h3 3
h
Enfoque General para Sistemas Estructurales Elsticos Lineales
Una estructura esqueletal puede ser idealizada con un conjunto de elementos barra interconectados por nudos. Como se ha visto
en los cursos de anlisis estructural, los desplazamiento de los nudos son los grados de libertad de las estructura. En marco
planos los nudo tienen 3 grados de libertad (2 de traslacin y uno de rotacin), en marcos 3D los nudos tienen 6 grados de
libertad. En general para marcos de baja altura los efectos de deformacin axial se desprecian , con lo cual el nmero de grados
Pg.- 2 07/06/2016 14:09
de libertad de un marco se reducen
Para los grados de libertad
considerados se tienen las fuerzas
dinmicas correspondientes, sin
embargo, lo momentos que se
relacionan con los giros en la mayora
de los casos son cero
fS1 k11 k12 .. k1j ... k1N u
Para realizar el anlisis, se 1
debe relacionar las fuerzas fS2 k21 k22 .. k2j ... k2N u 2
con los desplazamientos
fS3 =
.. .. .. ... .. ... ...
mediante la rigidez: ... ... .. .. ... ... ... ...
.. ... .. .. ... ... ... ...
f k kN2 .. kNj ... kNN u N
SN N1
Fuerzas de Amortiguamiento
Como ya se ha mencionado antes, el
amortiguamiento es el mecanismo mediante el cual
la energa de vibracin es disipada por la estructura , fD c1 c2 c2 u' 1
1 =
sta puede ser idealizada mediante el coeficiente de fD c2 c1 u' 2
amortiguamiento viscoso. 2
fD1 En sistemas donde se manejan
c11 c12 .. c1j ... c1N u'
1 matrices de amortiguamiento
fD2 c21 c22 .. c2j ... c2N u' 2 grandes resulta imprctico evaluar
cada unos de los coeficientes de
fD3 =
.. .. .. ... .. ... ...
... ... dicha matriz, por lo que se recurre
.. .. ... ... ... ...
a la definicin de relaciones de
.. ... .. .. ... ... ... ... amortiguamiento basados en
f c cN2 .. cNj ... cNN u' N datos experimentales.
DN N1
Pg.- 3 07/06/2016 14:09
Fuerzas de Inercia
La masa de una estructura est distribuida a lo
largo de sus miembros, pero puede ser idealizada
como masas concentradas en los nudos de la
estructura, que generalmente dicha idealizacin
suele arrojar resultados satisfactorios en el
anlisis. La concentracin de las masas en los
nudos se efecta mediante la participacin
tributaria de cada elemento con su nudo.
fIi = mi1 u''1 mi2 u''2 ... mij u''j .... miN u''N
fI1 m11 m12 .. m1j ... m1N u''1
fI2 m21 m22 .. m2j ... m2N u''2
fI3 =
.. .. .. ... .. ... ...
... ... .. .. ... ... ... ...
.. ... .. .. ... ... ... ...
f m mN2 .. mNj ... mNN u''N
IN N1
fI1 m11 0 .. 0 ... 0 u''
La inercia rotacional tiene 1
una influencia despreciable Entonces la matriz de masas solo f 0 m22 .. 0 ... 0 u''2
I2
en el anlisis prctico de las comprende las componentes 0 = .. .. 0 ... .. ... ...
estructuras, por lo tanto los asociadas con los desplazamientos ... ... ...
trminos mi,j y mjj son cero. .. .. 0 ... ...
laterales:
.. ... .. .. ... 0 ... ...
0 0 0 u''N
0 .. 0 ...
Ejemplo 2
Obtenga la matriz de rigidez del marco y formule la matriz de masas correspondiente. Una vez que obtenga la matriz de rigidez
calcule la matriz de rigidez lateral eliminando los grados de libertas relacionado con la masa cero y formule la ecuacin de
movimiento para una vibracin forzada sin amortiguamiento. Considere que los efectos de deformacin axial son despreciables.
Pg.- 4 07/06/2016 14:09
2 12 E I 2 [ 12 E ( 2 ) ( I) ] 12 E I
2
6EI 6 E I 6EI 6 E I
3
h3 h
3
h h
2
h
2
h
2
h
2
2
12 E I 12 E I
2
6 E I
6 E ( 2 ) ( I) 6EI
6 E ( 2 ) ( I) 6 E I 6EI
3 3 2 2 2 2 2 2
h h h h h h h h
6 E ( 2 ) ( I) 6 E I 6EI 4 E ( 2 ) ( I) 4EI 4 E ( 2 ) ( I) 2 E ( 2 ) ( I) 2 E I
0
2 2 2 h h 2h 2h h
K
h h h
6 E ( 2 ) ( I) 6 E I 6EI 2 E ( 2 ) ( I) 4 E ( 2 ) ( I) 4 E I 4 E ( 2 ) ( I) 2EI
2
2 2 2h h
h
2h
0
h
h h h
6EI 6EI 2EI 4EI 4 E ( I) 2EI
0
2 2 h h 2h 2h
h h
6EI 6EI 2 E I 2 E I 4 E I 4 E ( I)
0
2 2 h 2h h 2h
h h
Simplificando tenemos:
y la matriz de masas es:
72 E I
24 E I 6EI 6EI
6EI
6 E I
h3 3 2 2 2 2 2 0 0 0 0 0
h h h h h
0 1 0 0 0 0
24 E I 24 E I 6EI 6EI 6 E I 6EI 0 0 0 0 0 0
h3 h
3
h
2
h
2
h
2
h
2 ms' ms
0 0 0 0 0 0
6 E I 6 E I 16 E I 2EI 2 E I 0 0 0 0 0 0
0
2 2 h h h
K
h h 0 0 0 0 0 0
6 E I 6 E I 2EI 16 E I 2EI
2 2 h h
0
h
h h
6EI 6 E I 2EI 6 E I E I
0
h2 h
2 h h h
6EI 6 E I
0
2EI EI 6EI
h2 2 h h h
h
El mtodo de condensacin esttica es usado para eliminar los grados de libertad que tienen asignados masa cero, en este
caso, como ya se haba mencionado anteriormente las masas relacionadas con la inercia rotacional tiene muy poca influencia,
por lo que se consideran despreciables, por esa razn en la matriz de masas solamente tiene valores diferentes de cero sobre al
diagonal principal y en los grados de libertad relacionados con los desplazamientos laterales
72 E I
24 E I 6 E I 6EI
6 E I
6EI
h3 h
3 h2 h
2
h
2
h
2
ktt submatrix ( K 1 2 1 2 ) kt0 submatrix ( K 1 2 3 6 )
24 E I 24 E I 6 E I 6EI 6EI 6 E I
h3 3 h2 2 2 2
h h h h
16 E I 2EI 2EI
h h h
0
2EI 16 E I 2 E I
0
h h h 1 T
k00 submatrix ( K 3 6 3 6 ) klat ktt kt0 k00 kt0 simplify
2EI 0
6EI EI
h h h
2EI E I 6 E I
0
h h h
Formulando la ecuacin de movimiento para una vibracin libre sin amortiguamiento
Pg.- 5 07/06/2016 14:09
3348 E I
1068 E I
2 0 u''1 61 h 3 61 h
3 u 1 p 1 ( t)
ms =
0 1 u''2 p 2 ( t )
1068 E I 708 E I u 2
61 h 3 3
61 h
Diafragma Rgido
La representacin de las masa pueden simplificarse an ms cuando
estamos tratando con edificios, esto es debido a los efectos restrictivos
de los sistemas piso, cuyas caractersticas de rigidez son tales que el
piso se comporta como un diafragma cuya rigidez puede considerarse
infinita sobre el plano que lo contiene,
Esta suposicin, la cual resulta ser razonable en muchos casos, implica
que los desplazamientos de todos lo nudos de los marcos en un nivel
dado son los mismos que el diafragma rgido, entonces los grados de
libertad por nivel se reducen solo a tres:
Dos grados de libertad traslacionales sobre el plano que contienen al
diafragma rgido y...
Un grado de libertas rotaciones sobre el eje perpendicular al plano
del diafragma (eje z).
Lo anterior implica que la masa solo debe ser calculada sobre cada uno de los grados de libertad del diafragma rgido, ya no es
necesario calcular las contribuciones tributarias de los elementos sobre cada nudo.
En el caso de que la idealizacin de diafragma rgido no pueda ser
posible debido a las caractersticas del sistema de piso, entonces
debe considerarse el clculo de las masas por reas tributarias de
modo de concentrarlas sobre los nudos adyacentes de los marcos,
esto en forma adicional a las contribucin de lo elementos
estructurales.
Edificios con Distribucin Simtrica de Marcos
Si consideramos un edificio con diafragmas rgido y con planta simtrica, es decir, que los
marcos que conforman la estructura tienen rigideces laterales idnticas a un lado y otro del
centro de masas tanto en la direccin "x" y la direccin "y", obtenemos la siguientes
relaciones:
fsi = kxi u xi
donde kxi = matriz de rigidez lateral del marco "i" en la direccin "x"
u xi = vector de desplazamientos
Pg.- 6 07/06/2016 14:09
En el caso de los desplazamientos laterales, para cada marco en la direccin "x" tenemos
el mismo vector de desplazamientos u xi, lo que nos indica que las rigideces laterales
estn en paralelo, por lo tanto la rigidez lateral del edificio en dicha direccin es:
Kx =
kxi
La misma situacin tenemos en
Edificios con Distribucin Asimtrica de Marcos (1 Nivel)
Ahora extenderemos el anlisis para sistemas que carecen de simetra, claro est que considerando siempre el diafragma rgido
en todo los pisos del edificio; comenzaremos el anlisis con una estructura de un piso de altura.
De acuerdo a los grados de libertad del diafragma rgido tenemos la
siguiente relacin:
fSx kxx kxy kx ux
fSy = kyx kyy ky u y P = K dfg
Mo kx ky k
u
1.- Planteando el equilibrio suponiendo cargas
Fx = 0 fSx FB FC = 0
+ Fy = 0 fSy FA = 0
Mo = 0
d d
+ Mo e FA FB FC = 0
2 2
Planteando en forma matricial la ecuaciones de equilibrio, obtenemos la matriz esttica:
fSx 0 1 1 FA 0 1 1
0
fSy
1 0 0 F = 0 P BF = 0 P = BF B
1 0 0
B
d d 0 d d
Mo e F
2 C
e
2 2 2
2.- Ecuaciones de compatibilidad
uA = uy
uA = 0
uB = 0
uB = ux
uC = 0
uC = ux
uA = eu
d
uB = u
2
d
uB = u
2
Pg.- 7 07/06/2016 14:09
uA = uy eu 0 1 e 0 1 e
u A u x
Aplicando la 1 d 1 d
d 0 T 0
superposicin de los uB = ux u u B = 2 u y u marcos = A A=B = 2
2
desplazamientos de los d u d
tres grados de libertad: d
uC = ux u
u C 1 0 z 1 0
2 2 2
3.- Relaciones fuerza - desplazamiento
FA = kA u A
FA kA 0 0 u A kA 0 0
FB = kB u B FB =0 kB 0 u B F = ku u marcos ku 0 kB 0 Matriz de rigidez no
ensamblada
FC = kC u C
FC 0 0 kC u C
0 0 kC
P = B ku B
Sustituyendo 3 en 1 luego T
P = BF P = B ku u marcos u marcos = A P = B ku ( A )
d kC d kB
kB kC 0
2 2
Entonces la matriz de rigidez del
sistema conformado por marcos y Kdfg = B ku B
T
Kdfg B ku B
T
Kdfg
0 kA kA e
diafragma rgido lo podemos
dk dk
2
d kB
2
d kC
obtener con la expresin:
C B kA e kA e
2
2 2 4 4
t
t donde u''i = componentes de la
fIx = ms u''x
Como ya se sabe los grado de libertad de un diafragma rgido estn aceleracin total del centro
t de masa.
localizado en el centro de masas, entonces la fuerzas de inercia fIy = ms u''y
involucradas con cada grado de libertad seran:
t 1 2 2
fI = Io u'' Io = ms b d
12
es el momento de inercia
t
fIx ms 0 0 u''x u'' t
x u''x u''gx
fIy =0 ms 0 u'' t t
y ... y .. u''y = u''y u''gy tal como ya se haba visto en los sistemas de un grado
fI 0 0 Io
u'' t de libertad
u'' t u'' u''g
entonces la ecuacin de movimiento para un sistema compuesto por marcos y diafragma rgido es:
d kxC d kxB
kxB kxC 0 u ( t)
ms 0 0 u''x( t) 2 2
x ms u''gx ( t)
0 ms 0 u''y ( t)
0 kyA kyA e u ( t) = ms u''gy ( t)
y
0 0 Io
u'' ( t) dk 2 2 u ( t) Io u''g ( t)
2
d kxB d kxB d kxC
xC kyA e kyA e
2 2 4 4
Ejemplo 3
Obtenga la ecuacin de movimiento para un sistema de diafragma rgido:
a) con los marcos B y C con idnticas rigideces laterales
b) con los marcos B y C con idnticas rigideces laterales y el marco A posicionado en el centro de masas.
a) Los marcos B y C con idnticas rigideces laterales
Pg.- 8 07/06/2016 14:09
Tenemos que kB kx kC kx
En la relacin fuerza - desplazamiento de los marcos tenemos
FA kA 0 0 u A kA 0 0
FB =0 kx 0 u B ku 0 kx 0
FC 0 0 kx
u C 0 0 kx
2 kx 0 0
T
0 kA kA e
Kdfg B ku B Kdfg
kx d
2
2
0 kA e kA e
2
2 kx 0 0 De acuerdo a la ecuacin resultante, se observa que
ms 0 0 u''x( t) u x( t) ms u''gx ( t) el grado de libertad en la direccin "x" ocurre de
0 kyA kyA e
0 ms 0 u''y ( t) u y ( t) = ms u''gy ( t) manera independiente de los dems
kx d
2 u ( t) desplazamientos, es decir que la ecuacin de
0 0 Io
u'' ( t) 0 kyA e kyA e
2 Io u''g ( t) movimiento que relaciona el desplazamiento en "x"
2 est desacoplada del sistema.
ms u''x( t) 2 kx u x( t) = ms u''gx ( t)
b) Los marcos B y C con idnticas rigideces laterales y el marco A posicionado en el centro de masas.
Esto implica que e 0
fSx 0 1 1 FA 0 1 1 0 1 1
Entonces en las 1 0 0 F 1 0 0 1 0 0 T
ecuaciones de equilibrio fSy = B B B Kdfg B ku B
d d d d d d
Mo e F
2 C
e 0
2 2 2 2 2
2 kx 0 0 2 kx 0 0
ms 0 0 u''x( t) u x( t ) ms u''gx ( t)
0 kA 0 0 kyA 0
Kdfg 0 ms 0 u''y ( t) u y ( t ) = ms u''gy ( t)
d kx
2 d kx u ( t )
2
0 0 0 0 Io
u'' ( t) 0 0 Io u''g ( t)
2 2
Ahora todas las ecuaciones estn desacopladas, es decir, que la respuesta de movimiento en cada grado de libertad del
diafragma rgido solo est en funcin de ese mismo grado de libertad, es decir, que acta en forma independiente de los
dems grados de libertad.
Pg.- 9 07/06/2016 14:09
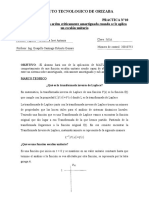
Edificios con Distribucin Asimtrica de Marcos (Varios Niveles)
Ejemplo 4.
Utilice la matriz de rigidez lateral obtenida para el marco de dos niveles del ejemplo 2 y obtenga la ecuacin de movimiento
considerando que el marco
E 1 I 1 h 3
Las cotas a los ejes de los marcos con respecto al centro de
Marco1 Marco i en la direccin "x"
masas son:
Marco i en la T T
x ( 0 0 10 6 12 ) y ( 8 9 0 0 0 )
direccin "y"
Construimos la matriz esttica planteando todas las
ecuaciones de equilibrio por cada nivel del edificio:
Marco4 Marco3
Marco5
Marco2
Fx = 0 Px F
1 1 1
F
2 1
=0
Px F F =0
2 1 2 2 2
+ Fy = 0 Py
1
F
3 1
F
4 1
F
5 1
=0
Py F F F =0
2 3 2 4 2 5 2
+ Mo = 0 Mo y1 F
1 1 1
y2 F
2 1
x3 F
3 1
x4 F
4 1
x5 F
5 1
=0
donde i = se refiere al marco "i"
j = se refiere al nivel
Mo y1 F y2 F x3 F x4 F x5 F =0
2 1 2 2 2 3 2 4 2 5 2
Entonces la ecuacin matricial de equilibrio esttico es:
F1 1
F1 2 0 Matriz esttica
Px
1 F2 1 0 1 0 1 0 0 0 0 0 0 0
P 0
1 F 0
0 1 0 0 0 0 0 0
x2 2 2 0 1 0 1 0 0 0 0 0 0
0 1 0 1 0 0 0 0 0 0
0
P 0 0
0 0 F3 1
0 0 0 1 0 1 0 1
y1
0 0 0 1 0 1 0 1
0 B 0
1 F = 0 0 0 0 1 0 1 0 1
0 0 0 0 0 1 0 1 0
y
Py 2 3 2 0 0 y 0 x 0 x 0 x 0
y y2 x3 1 2 3 4 5
1
0 0 0 x4 0 x5 0
F 0
Mo 1 4 1 0 y 0 y 0 x 0 x 0 x
0 y1 0 y2 0 x3 0 x4 0 x5 1 2 3 4 5
F 0
Mo 4 2 0
2 F 0
5 1
F
5 2
Relaciones fuerza desplazamiento (matrices laterales de cada marco):
3348 E I
1068 E I 3348 E I
1068 E I 3348 E I
1068 E I 3348 E I
1068 E I
61 h 3 61 h
3 61 h 3 61 h
3 61 h 3 61 h
3 61 h 3 61 h
3
k k 1.5 k k 1.5
1 2 3 4
1068 E I 708 E I 1068 E I 708 E I 1068 E I 708 E I 1068 E I 708 E I
61 h 3 3 61 h 3 3 61 h 3 3 61 h 3 3
61 h 61 h 61 h 61 h
3348 E I
1068 E I
61 h 3 61 h
3
k 2
5 ku diag( k ) ku Ensamblaje2 ku k
1
1068 E I 708 E I
61 h 3 3
61 h
Pg.- 10 07/06/2016 14:09
2.033 0.648 0 0 0 0 0 0 0 0
0.648 0.43 0 0 0 0 0 0 0 0
0 0 3.049 0.973 0 0 0 0 0 0
0 0 0.973 0.645 0 0 0 0 0 0
0 0 0 0 2.033 0.648 0 0 0 0
ku
0 0 0 0 0.648 0.43 0 0 0 0
0 0 0 0 0 0 3.049 0.973 0 0
0.973 0.645
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 4.066 1.297
0
0 0 0 0 0 0 0 1.297 0.86
La matriz de rigidez del sistema estructural en funcin de los desplazamientos laterales y el giro de los diafragmas rgidos es:
5.082 1.621 0 0 11.18 3.566
1.621 1.075 0 0 3.566 2.364
T
0 0 9.148 2.918 46.754 14.914
Kdfg B ku B
0 0 2.918 1.934 14.914 9.887
11.18 3.566 46.754 14.914 1275.574 406.903
3.566 2.364 14.914 9.887 406.903 269.745
ms 0 0 0 0 0 u''x ux ms u''gx ( t)
1 1 1 1
0 ms 0 0 0 0 u''x 5.082 1.621 0 0 11.18 3.566 u m u'' ( t)
2 2 x2 s2 gx
0 0 ms 0 0 0
u'' 1.621 1.075 0 0 3.566 2.364
u
m u'' ( t)
1 y1 0 0 9.148 2.918 46.754 14.914 y 1 s1 gy
=
0 0 0 ms 0 0 u''y 0 0 2.918 1.934 14.914 9.887 u y ms2 u''gy ( t)
2 2 2
11.18 3.566 46.754 14.914 1275.574 406.903
0 0 0 0 Io 0 u'' u 1 Io 1 u''g ( t)
1
1
3.566 2.364 14.914 9.887 406.903 269.745
0 0 0 0 0 Io u'' u Io u''g ( t)
2 2 2 2
Pg.- 11 07/06/2016 14:09
You might also like
- Dinamica Sistemas Orden 2Document2 pagesDinamica Sistemas Orden 2mugreyporquerias902No ratings yet
- Guía de Actividades Nº1 - Libro Novena EdiciónDocument7 pagesGuía de Actividades Nº1 - Libro Novena EdicióncamimedNo ratings yet
- Fase 6 Daniela SantanderDocument10 pagesFase 6 Daniela SantanderDaniela santanderNo ratings yet
- Minimos Cuadrados GeneralizadosDocument20 pagesMinimos Cuadrados GeneralizadosSandra MCalcina0% (1)
- Pauta Control 2Document4 pagesPauta Control 2Matias McGregorNo ratings yet
- C1B P8 Lopez Sanchez JocsanDocument9 pagesC1B P8 Lopez Sanchez JocsanJocsan LopezNo ratings yet
- Solcuionario de Capitulo 1 GolsteinDocument7 pagesSolcuionario de Capitulo 1 GolsteingeNo ratings yet
- Respuesta sistema segundo orden impulsoDocument4 pagesRespuesta sistema segundo orden impulsoAntonio AguilarNo ratings yet
- ControlDocument7 pagesControlDelta TrinityNo ratings yet
- INTERACCIONES FUNDAMENTALESDocument7 pagesINTERACCIONES FUNDAMENTALESMarco Antonio Chávez CárdenasNo ratings yet
- Tarea 4 - Resolver Problemas y Ejercicios Por Medio de Series de Potencia y Transformada de LaplaceDocument6 pagesTarea 4 - Resolver Problemas y Ejercicios Por Medio de Series de Potencia y Transformada de LaplaceLuz Victoria MoraNo ratings yet
- dif vectorial teoria 1Document5 pagesdif vectorial teoria 1Yan XietNo ratings yet
- Introduccion A Las Funciones Vectoriales PDFDocument5 pagesIntroduccion A Las Funciones Vectoriales PDFAngela GelvezNo ratings yet
- Ejercicios EconometríaDocument10 pagesEjercicios EconometríaAndrea Cano SánchezNo ratings yet
- Actividad Fase 3Document19 pagesActividad Fase 3kevin narvaez henriquezNo ratings yet
- Semana 7 DinamicaDocument1 pageSemana 7 DinamicaLula Narro raicoNo ratings yet
- Tarea 4Document5 pagesTarea 4Luz Victoria MoraNo ratings yet
- C1A P8 Aguilar Valenzuela José AntonioDocument6 pagesC1A P8 Aguilar Valenzuela José AntonioAntonio AguilarNo ratings yet
- Pauta Ayudantía N°12Document4 pagesPauta Ayudantía N°12Juan David CruzNo ratings yet
- Respuesta sistemas segundo orden sobreamortiguado escalónDocument6 pagesRespuesta sistemas segundo orden sobreamortiguado escalónAntonio AguilarNo ratings yet
- Ejercicio Proceso Vida y MuerteDocument7 pagesEjercicio Proceso Vida y MuerteDiego Milla JimenezNo ratings yet
- Transformada de Laplace de funciones periódicas y cambio de escala temporalDocument4 pagesTransformada de Laplace de funciones periódicas y cambio de escala temporalSergio Enrique Berrios GonzalezNo ratings yet
- Fundamentals of PhotonicsDocument3 pagesFundamentals of PhotonicsAliyerkiNo ratings yet
- Solucion Ay 12Document16 pagesSolucion Ay 12Paula Javiera Hermosilla SobarzoNo ratings yet
- Informe Practica 6 (Guion M3)Document11 pagesInforme Practica 6 (Guion M3)marcos requenaNo ratings yet
- C1B P7 Lopez Sanchez JocsanDocument6 pagesC1B P7 Lopez Sanchez JocsanJocsan LopezNo ratings yet
- Comportamiento de la conductividad en función de la temperatura en materiales intrínsecos, extrínsecos y conductoresDocument12 pagesComportamiento de la conductividad en función de la temperatura en materiales intrínsecos, extrínsecos y conductoresLayla RaschNo ratings yet
- Ecuaciones de LagrangeDocument4 pagesEcuaciones de LagrangePaula Andrea Tello PrietoNo ratings yet
- Cap 12-2013 LaplaceDocument36 pagesCap 12-2013 LaplaceDaniel Gonzales LlanosNo ratings yet
- Unidad 02 - 6 - Principio de Trabajo y Energía PDFDocument14 pagesUnidad 02 - 6 - Principio de Trabajo y Energía PDFJOSE ANTONIO VALDEZ CCAHUANANo ratings yet
- 2 Ejercicios - Velocidad - Grupo - Fase PDFDocument8 pages2 Ejercicios - Velocidad - Grupo - Fase PDFpaulo_rieloffNo ratings yet
- Numeros CuanticosDocument10 pagesNumeros CuanticosMaria luz CuauroNo ratings yet
- Ejercicios - Desarrollados - Unidad - 3Document7 pagesEjercicios - Desarrollados - Unidad - 3Fabio SanchezNo ratings yet
- Examen 3.1 Con Solución Ecuaciones DiferencialesDocument3 pagesExamen 3.1 Con Solución Ecuaciones DiferencialesJaviNo ratings yet
- Comparación PoblacionesDocument17 pagesComparación PoblacionesFabby Villarauz RicoNo ratings yet
- Choques bidimensionalesDocument6 pagesChoques bidimensionalesAndrés MoncadaNo ratings yet
- Pendulos AcopladosDocument4 pagesPendulos AcopladosJuan Miguel Lopez ParraNo ratings yet
- Parcial Primer CorteDocument10 pagesParcial Primer Corteoctavio sarmientoNo ratings yet
- Oscilador armónico relativistaDocument10 pagesOscilador armónico relativistaNicolas Celedon HernandezNo ratings yet
- Semana 1 ELVDocument33 pagesSemana 1 ELVFranz ZNo ratings yet
- 2 Semana Básico Ciencias - QuímicaDocument22 pages2 Semana Básico Ciencias - QuímicaNils Quiña PomaNo ratings yet
- Sistema de segundo orden criticamente amortiguado al aplicar escalón unitarioDocument5 pagesSistema de segundo orden criticamente amortiguado al aplicar escalón unitarioAntonio AguilarNo ratings yet
- Taller #1 y #2Document9 pagesTaller #1 y #2paola salasNo ratings yet
- Ejemlos de DistribucionDocument10 pagesEjemlos de DistribucionEduardo Isai PMNo ratings yet
- Efecto Doppler Relativista y Aplicaciones PDFDocument28 pagesEfecto Doppler Relativista y Aplicaciones PDFgaryNo ratings yet
- Trabajo Final EDDocument4 pagesTrabajo Final EDAracely GalarzaNo ratings yet
- Transformada Laplace MADocument28 pagesTransformada Laplace MAFernando RomeroNo ratings yet
- Informe Práctica 8 - Péndulos Acoplados Por ResorteDocument4 pagesInforme Práctica 8 - Péndulos Acoplados Por ResorteFERNANDO ALFONSO PATIÑO RODRÍGUEZNo ratings yet
- Las Ecuaciones de LagrangeDocument7 pagesLas Ecuaciones de Lagrangebarturo100% (1)
- Distribución Maxwell-Boltzmann: análisis de su estructura e implicacionesDocument2 pagesDistribución Maxwell-Boltzmann: análisis de su estructura e implicacionesMartín NavaNo ratings yet
- Euler FunctionDocument5 pagesEuler FunctionCrumbles DomtiNo ratings yet
- Transformada de Fourier de Señal PeriódicaDocument21 pagesTransformada de Fourier de Señal PeriódicaMilton RojasNo ratings yet
- Tipo de Ejercicios 2 - Transformada de Laplace - BDocument3 pagesTipo de Ejercicios 2 - Transformada de Laplace - BYonatan RodriguezNo ratings yet
- Taller RelatividadDocument12 pagesTaller RelatividadDANIEL MUÑOZ SUÁREZNo ratings yet
- Fase 6 - CompilacionDocument28 pagesFase 6 - CompilacionPrimero - Virginia RossiNo ratings yet
- Mecanica PDFDocument5 pagesMecanica PDFV.No ratings yet
- Método de Bergeron Equivalentes Norton1 PDFDocument31 pagesMétodo de Bergeron Equivalentes Norton1 PDFJorge TorresNo ratings yet
- ESTIMACION Electrica Parte 1Document389 pagesESTIMACION Electrica Parte 1Ricardo H RochaNo ratings yet
- 1 Info1Document1 page1 Info1Ricardo H RochaNo ratings yet
- Proceso OptimaDocument1 pageProceso OptimaRicardo H RochaNo ratings yet
- Volumen 4 Tomo IIIDocument25 pagesVolumen 4 Tomo IIIJc Medina DonnelliNo ratings yet
- GeneradoresDocument18 pagesGeneradoresBalam Valentin Catzim EspinosaNo ratings yet
- Datos Enviados A Los Fabricantes de Vigueta-ModelDocument1 pageDatos Enviados A Los Fabricantes de Vigueta-ModelRicardo H RochaNo ratings yet
- Manual de Remaches para Construcción AceroDocument67 pagesManual de Remaches para Construcción Acero.......No ratings yet
- FormatoDocument120 pagesFormatoRicardo H RochaNo ratings yet
- To DoDocument1 pageTo DoRicardo H RochaNo ratings yet
- RP01 Tabimax10Document1 pageRP01 Tabimax10Ricardo H RochaNo ratings yet
- El Centro Sismo de 1940Document27 pagesEl Centro Sismo de 1940Ricardo H RochaNo ratings yet
- Comandos de OptimizacionDocument1 pageComandos de OptimizacionRicardo H RochaNo ratings yet
- Acciones Dinamicas S-02 - Vibracion LibreDocument9 pagesAcciones Dinamicas S-02 - Vibracion LibreIngMerchoNo ratings yet
- Vigueta y BobedillaDocument1 pageVigueta y BobedillaRicardo H RochaNo ratings yet
- Cotización de viguetas y bovedillas para obra en XalapaDocument1 pageCotización de viguetas y bovedillas para obra en XalapaRicardo H RochaNo ratings yet
- Acciones Dinámicas (S-09) - VGL - Vibración LibreDocument18 pagesAcciones Dinámicas (S-09) - VGL - Vibración LibreRicardo H RochaNo ratings yet
- Acciones Dinamicas S-02 - Vibracion LibreDocument9 pagesAcciones Dinamicas S-02 - Vibracion LibreIngMerchoNo ratings yet
- Rendimientos T Agua PotableDocument12 pagesRendimientos T Agua PotableRicardo H RochaNo ratings yet
- Cotización de viguetas y bovedillas para obra en XalapaDocument1 pageCotización de viguetas y bovedillas para obra en XalapaRicardo H RochaNo ratings yet
- Refuerzo en Torre PDFDocument1 pageRefuerzo en Torre PDFRicardo H RochaNo ratings yet
- Cuestiones Generales de MaderaDocument16 pagesCuestiones Generales de MaderaMaria Cecilia Suarez RubiNo ratings yet
- Pendientes y DeflexionesDocument6 pagesPendientes y DeflexionesRicardo H RochaNo ratings yet
- Datos Enviados A Los Fabricantes de Vigueta-ModelDocument1 pageDatos Enviados A Los Fabricantes de Vigueta-ModelRicardo H RochaNo ratings yet
- Nuevo Documento de TextoDocument1 pageNuevo Documento de TextoRicardo H RochaNo ratings yet
- Empujes Estación Álvaro Obregón 10.00mDocument1 pageEmpujes Estación Álvaro Obregón 10.00mRicardo H RochaNo ratings yet
- Puntos Crudos Sin Nombre OkDocument30 pagesPuntos Crudos Sin Nombre OkRicardo H RochaNo ratings yet
- Manual Maestro ObraDocument104 pagesManual Maestro ObraJesusAlvarezWindervoxchel100% (1)
- MANUAL DE CONSTRUCCIÓN Nociones Básicas para La Construcción de Una Vivienda Bajo El Sistema de Albañilería Confinada PDFDocument62 pagesMANUAL DE CONSTRUCCIÓN Nociones Básicas para La Construcción de Una Vivienda Bajo El Sistema de Albañilería Confinada PDFWilder Vargas100% (1)
- Cuantificacion de Materiales Quiroz Ruiz Everardo 5º DDocument3 pagesCuantificacion de Materiales Quiroz Ruiz Everardo 5º DRicardo H RochaNo ratings yet
- Pasaporte Primera Vez Mayor de EdadDocument6 pagesPasaporte Primera Vez Mayor de EdaddobleuyoNo ratings yet
- Tarea 3 Desarrollo y Profesional 19 de AgostoDocument5 pagesTarea 3 Desarrollo y Profesional 19 de AgostoGriselí BachánNo ratings yet
- Consulta Pub Dispatch ActionDocument2 pagesConsulta Pub Dispatch ActionFedericoNo ratings yet
- Conflicto Social "Las Bambas"Document10 pagesConflicto Social "Las Bambas"Maricarmen SalazarNo ratings yet
- Madres de Plaza de Mayo: la historia de Gustavo PasikDocument18 pagesMadres de Plaza de Mayo: la historia de Gustavo PasikIvo FNNo ratings yet
- Convocatoria n.001 Fortalecimiento Escuelas de PolicialDocument14 pagesConvocatoria n.001 Fortalecimiento Escuelas de PolicialmosquerasanchezuberneyNo ratings yet
- Wuolah Free Practicas Teoria Del DerechoDocument37 pagesWuolah Free Practicas Teoria Del Derechomariiagaarcia14No ratings yet
- Código Orgánico de Tribunales PDFDocument175 pagesCódigo Orgánico de Tribunales PDFmarioNo ratings yet
- Asignación de funciones de Vicedirector en escuela de La MatanzaDocument3 pagesAsignación de funciones de Vicedirector en escuela de La MatanzaMarcela Fabiana PerafanNo ratings yet
- Acta Declinatoria MarineroDocument2 pagesActa Declinatoria MarineroFabii Elías MedinaNo ratings yet
- Sesion 01 TerceroDocument7 pagesSesion 01 TerceroGiovanaElizabethSotoRosario100% (6)
- Tejiendo HistoriasDocument302 pagesTejiendo HistoriasMartínNo ratings yet
- Examen de Formación Cívica y Ética del Instituto de Educación de AguascalientesDocument4 pagesExamen de Formación Cívica y Ética del Instituto de Educación de AguascalientesHatchi 8choNo ratings yet
- Contabilidad Bancaria: Operaciones Financieras ActivasDocument23 pagesContabilidad Bancaria: Operaciones Financieras ActivasPedro Zuñiga Lopez0% (1)
- InvoiceDocument4 pagesInvoice22040166No ratings yet
- Caso Valderrey (CC0201 LP - 118796) Beneficio - RetroactividadDocument2 pagesCaso Valderrey (CC0201 LP - 118796) Beneficio - RetroactividadDaniela FariasNo ratings yet
- Unidad 5 Administracion de SalariosDocument14 pagesUnidad 5 Administracion de SalariosJose AlcántaraNo ratings yet
- Programa Multianual de Inversiones en Peru1Document24 pagesPrograma Multianual de Inversiones en Peru1Jahaira Cueva100% (1)
- Cultura de paz en los MandamientosDocument4 pagesCultura de paz en los MandamientosTamaraNo ratings yet
- DOF - Diario Oficial de La FederaciónDocument3 pagesDOF - Diario Oficial de La FederaciónArturo Fuentes50% (8)
- Aeromexico Pahjdm 2018-11-29 Uio-Mty C Jacome Zapata 1392955609126Document2 pagesAeromexico Pahjdm 2018-11-29 Uio-Mty C Jacome Zapata 1392955609126AlexVillagómezJacomeNo ratings yet
- 1MC KDocument3 pages1MC KKevin ArnoldNo ratings yet
- DTOP-856 Solicitud para Obtener Tablillas Especial de RadioaficionadoDocument2 pagesDTOP-856 Solicitud para Obtener Tablillas Especial de RadioaficionadoLuis CuberoNo ratings yet
- Breve Siddur Karaíta en EspañolDocument5 pagesBreve Siddur Karaíta en EspañolHeraldo Gabriel Cabrera Romero100% (1)
- S3 - Los Sindicatos en La República DominicanaDocument3 pagesS3 - Los Sindicatos en La República DominicanaFLOR INES MERCEDES PEGUERONo ratings yet
- Resumen TucididesDocument3 pagesResumen TucididesAgus LemosNo ratings yet
- Esquema Edad ContemporaneaDocument3 pagesEsquema Edad ContemporaneaMarina Molero martínezNo ratings yet
- Himno Nacional de Venezuela y Simbolos de San AntonioDocument5 pagesHimno Nacional de Venezuela y Simbolos de San Antoniomari100% (1)
- Send Files To TVDocument1 pageSend Files To TVagustinalcoiNo ratings yet
- Correa Montoya - 2010 - Significado Derecho A La CiudadDocument26 pagesCorrea Montoya - 2010 - Significado Derecho A La CiudadanjcaicedosaNo ratings yet