You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual Book KBB R4-2Document53 pagesManual Book KBB R4-2buat drive100% (5)
- FM DS 7-14 - Fire Protection For Chemical PlantsDocument44 pagesFM DS 7-14 - Fire Protection For Chemical Plantsamal118100% (6)
- Arson Invest 2Document100 pagesArson Invest 2Harrison sajorNo ratings yet
- LPG Cargo Calculation: B/L LoadedDocument1 pageLPG Cargo Calculation: B/L LoadedDeep SeaNo ratings yet
- Brochure Fire ExtinguishersDocument8 pagesBrochure Fire ExtinguisherscmkohNo ratings yet
- SBT Petroleum 2018 Training BrochureDocument131 pagesSBT Petroleum 2018 Training BrochureChijioke Zion OkabieNo ratings yet
- Cavo Motor Operations ManualDocument132 pagesCavo Motor Operations Manualodscam100% (1)
- UNIT1L1S Cat Fuel Systems PDFDocument24 pagesUNIT1L1S Cat Fuel Systems PDFbejoythomasNo ratings yet
- YTG6000N 3TNV76 Generator Model Engine ModelDocument1 pageYTG6000N 3TNV76 Generator Model Engine ModelJohn GarnetNo ratings yet
- From Reservoir To Burner Tip: A Primer On Natural GasDocument16 pagesFrom Reservoir To Burner Tip: A Primer On Natural Gasrituraj mathurNo ratings yet
- Msds No 6182 PropaneDocument7 pagesMsds No 6182 Propanemolecule112No ratings yet
- Red Kite Oil Filed ServicesDocument4 pagesRed Kite Oil Filed ServicesAhmed Imtiaz RaoNo ratings yet
- Argumenter VOLVO LKW ENDocument2 pagesArgumenter VOLVO LKW ENFahad KhalidNo ratings yet
- Westfalia Service TrainingDocument206 pagesWestfalia Service TrainingBechir Samyr100% (2)
- Boiler CalculationDocument27 pagesBoiler CalculationProcess EngineerNo ratings yet
- Underwriters 76fh Woodstove UsMan (En)Document52 pagesUnderwriters 76fh Woodstove UsMan (En)carlos diazNo ratings yet
- FCC Process DesignDocument76 pagesFCC Process DesignNelson MartinezNo ratings yet
- ONGC Visit ReportDocument11 pagesONGC Visit ReportPradeep Aneja100% (1)
- Intramolecular Forces and Intermolecular ForcesDocument12 pagesIntramolecular Forces and Intermolecular ForcesDuyen Nguyen100% (1)
- Premium Quality Synthetic Rotary Vacuum Pump Oil: SV-77Document9 pagesPremium Quality Synthetic Rotary Vacuum Pump Oil: SV-77supervacoilsNo ratings yet
- Basics of Explosion ProtectionDocument31 pagesBasics of Explosion ProtectionLinh Vo TanNo ratings yet
- Framo Cargo Pumping System BrochureDocument17 pagesFramo Cargo Pumping System BrochureAdrian Cristian100% (3)
- Two Cylinder ModelsDocument8 pagesTwo Cylinder ModelsPaul MartinNo ratings yet
- Chapter 22 - Alkanes and AlkenesDocument6 pagesChapter 22 - Alkanes and AlkenesJERVINLIM100% (1)
- Debutaniser OptimisationDocument5 pagesDebutaniser OptimisationAntonNo ratings yet
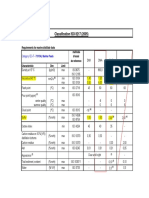
- Classification ISO 8217 (2005)Document5 pagesClassification ISO 8217 (2005)Salah JallaliNo ratings yet
- ME 422 Combustion ProjectDocument4 pagesME 422 Combustion ProjectPaul PetrousNo ratings yet
- Hydrogen Fuel CellsDocument18 pagesHydrogen Fuel CellsLivreinatural Arkairis100% (3)
- Project On Indain Oil Corporation LimitedDocument90 pagesProject On Indain Oil Corporation LimitedViPul85% (13)
- Boiler Normal Shut DownDocument13 pagesBoiler Normal Shut DownRajat SharmaNo ratings yet