You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Boeing 787 Flight Crew Operations ManualDocument4 pagesBoeing 787 Flight Crew Operations ManualFrancisco SoFuentes0% (10)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 5LevelsofLeadership Summary v2.1-1 PDFDocument19 pages5LevelsofLeadership Summary v2.1-1 PDFAbdullah Kilawi100% (1)
- Leonardo Da Vinci PowerPoint PresentationDocument17 pagesLeonardo Da Vinci PowerPoint Presentationdéjà scantleburyNo ratings yet
- Aqua 1Document324 pagesAqua 1staryklt100% (1)
- Uow009694 Hydraulic Services Design StandardsDocument37 pagesUow009694 Hydraulic Services Design StandardsstarykltNo ratings yet
- Power System Sizing Form: G G G GDocument4 pagesPower System Sizing Form: G G G GstarykltNo ratings yet
- Uow009699 Building Elements Commissioning StandardDocument28 pagesUow009699 Building Elements Commissioning StandardstarykltNo ratings yet
- Guide To Concrete RepairDocument168 pagesGuide To Concrete Repairhansen_zinck4751100% (11)
- Floor Waste Installation OverviewDocument2 pagesFloor Waste Installation OverviewstarykltNo ratings yet
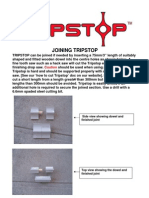
- Ts Join GuideDocument1 pageTs Join GuidestarykltNo ratings yet
- Glossary of Home Construction Terms - HCM-04759Document15 pagesGlossary of Home Construction Terms - HCM-04759starykltNo ratings yet
- Residential Electric Service InstallationDocument56 pagesResidential Electric Service InstallationJ Hevesi100% (1)
- 7123AF Aquatherm Fusiotherm Hot & Cold Water System 2010Document9 pages7123AF Aquatherm Fusiotherm Hot & Cold Water System 2010starykltNo ratings yet
- Enclosed Shower BaysetDocument2 pagesEnclosed Shower BaysetstarykltNo ratings yet
- 0621 SIKA Waterproofing - Wet AreasDocument12 pages0621 SIKA Waterproofing - Wet Areasstaryklt100% (1)
- @@@ Geothermal-WellsDocument44 pages@@@ Geothermal-WellsstarykltNo ratings yet
- MEN System of EarthningDocument6 pagesMEN System of EarthningstarykltNo ratings yet
- Ceramic Tilles Installation ManualDocument16 pagesCeramic Tilles Installation ManualstarykltNo ratings yet
- 0 - Mains Water Pipe SizingDocument4 pages0 - Mains Water Pipe SizingstarykltNo ratings yet
- Bbse3006 1011 05-Waterside01Document60 pagesBbse3006 1011 05-Waterside01starykltNo ratings yet
- Mebs6000 1011 01 Cold & Flush WaterDocument70 pagesMebs6000 1011 01 Cold & Flush Waterstaryklt100% (1)
- Specification For Stop ValvesDocument9 pagesSpecification For Stop ValvesstarykltNo ratings yet
- Bbse3006 1011 05-Waterside01Document60 pagesBbse3006 1011 05-Waterside01starykltNo ratings yet
- Appendix 07 - Deliverables - Detailed SubmissionDocument10 pagesAppendix 07 - Deliverables - Detailed SubmissionstarykltNo ratings yet
- 2014 Book TheEightInternationalConferencDocument529 pages2014 Book TheEightInternationalConferencAna-Maria Vasilache100% (1)
- Admission Process Flow ChartDocument2 pagesAdmission Process Flow Chartjhon dickNo ratings yet
- SL No Package Cost/Sft Remarks Amount (INR) : PROJECT: Indore-Licious General Contract WorksDocument22 pagesSL No Package Cost/Sft Remarks Amount (INR) : PROJECT: Indore-Licious General Contract WorksChaitanya IdateNo ratings yet
- Romulan Narada: Hull DataDocument2 pagesRomulan Narada: Hull Datamimihell75No ratings yet
- Very Important Backup Protection of Transformer - Over Current and Earth FaultDocument2 pagesVery Important Backup Protection of Transformer - Over Current and Earth Faultengnajeeb75No ratings yet
- UNWINDbyShustermanBookTestandKey 1Document6 pagesUNWINDbyShustermanBookTestandKey 1Lucy YangNo ratings yet
- An Introduction To: Hyperion Financial Data Quality ManagementDocument26 pagesAn Introduction To: Hyperion Financial Data Quality ManagementAmit SharmaNo ratings yet
- Progress, Coexistence, and Intellectual FreedomDocument21 pagesProgress, Coexistence, and Intellectual FreedomrunningturtleNo ratings yet
- When To OperateDocument2 pagesWhen To OperatepankajNo ratings yet
- Choosing A Recruitment AgencyDocument2 pagesChoosing A Recruitment Agencyanis_kasmani9880No ratings yet
- Minor Project: Topic - Smart Street Light Sensor Using LDRDocument21 pagesMinor Project: Topic - Smart Street Light Sensor Using LDRHimanshu kumarNo ratings yet
- N-Channel Enhancement-Mode Power MOSFETDocument5 pagesN-Channel Enhancement-Mode Power MOSFETJose Reiriz GarciaNo ratings yet
- An Efficient Inductive Rectifier Based Piezo-Energy Harvesting Using Recursive Pre-Charge and Accumulation OperationDocument14 pagesAn Efficient Inductive Rectifier Based Piezo-Energy Harvesting Using Recursive Pre-Charge and Accumulation OperationHafeez KtNo ratings yet
- Knop's SolucionDocument2 pagesKnop's SolucionramongonzaNo ratings yet
- MC - New QP - Refinery Process OperatorDocument16 pagesMC - New QP - Refinery Process OperatorgreendaycheNo ratings yet
- 0580 Probability Teaching Pack v1Document41 pages0580 Probability Teaching Pack v1Dennis OtienoNo ratings yet
- Elk-M1 Rs232 Protocol+Ver+1.84Document68 pagesElk-M1 Rs232 Protocol+Ver+1.84David ChowNo ratings yet
- Greed Vs GrievanceDocument6 pagesGreed Vs GrievanceAlᎥyⱥภNo ratings yet
- Tailings Dam Breach Analysis: A Review of Methods, Practices, and UncertaintiesDocument23 pagesTailings Dam Breach Analysis: A Review of Methods, Practices, and UncertaintiesAyashkant sahoo100% (1)
- Centro de Soporte de HPE: HP 5800/5830 Switch/6600 Router Series - BGP Configuration: BGP Configuration ExamplesDocument14 pagesCentro de Soporte de HPE: HP 5800/5830 Switch/6600 Router Series - BGP Configuration: BGP Configuration ExamplesJavierLozaLlucoNo ratings yet
- Doc-20230601-Wa0002 230601 124749Document2 pagesDoc-20230601-Wa0002 230601 124749Roopamathi PandiyanNo ratings yet
- JBL-Studio S36 SpecsDocument2 pagesJBL-Studio S36 SpecsJhasmani VillegasNo ratings yet
- Movement in Campus DesignDocument43 pagesMovement in Campus DesignSindhuja Shanmuga VadivuNo ratings yet
- Mechanical Interview QuestionsDocument24 pagesMechanical Interview QuestionsSurya Kiran75% (4)
- 6MD86 Complete Wg2Document83 pages6MD86 Complete Wg2daralaketa100% (1)
- Course Book: 2. Mina and The Dinosaurs Lesson (Summary)Document4 pagesCourse Book: 2. Mina and The Dinosaurs Lesson (Summary)rashi bakshNo ratings yet
- Crank ShaftDocument49 pagesCrank Shaftpramo_dassNo ratings yet