You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Payment Receipt PDFDocument1 pagePayment Receipt PDFSivaprakash VetNo ratings yet
- International Financial Management 3Document46 pagesInternational Financial Management 3胡依然No ratings yet
- Success: Equipment: Container - 40' HC # 1Document2 pagesSuccess: Equipment: Container - 40' HC # 1Fitri FitrianahNo ratings yet
- Demonstrativo de Posição: Dayane David Duraes CPF / CNPJ: 582554608Document4 pagesDemonstrativo de Posição: Dayane David Duraes CPF / CNPJ: 582554608Fábio AndreuccettiNo ratings yet
- UK Company ListDocument29 pagesUK Company Listsimonmphilip100% (1)
- Account StatementDocument2 pagesAccount StatementgobeyondskyNo ratings yet
- BembosBurger PDFDocument34 pagesBembosBurger PDFcreynosocNo ratings yet
- Business Ethics - Doc Answer SheetDocument23 pagesBusiness Ethics - Doc Answer SheetSujit Raj Gourav100% (1)
- Chapter 18 HomeworkDocument3 pagesChapter 18 HomeworkTracy LeeNo ratings yet
- How The Young Are Indoctrinated To ObeyDocument3 pagesHow The Young Are Indoctrinated To ObeyAnonymous gZoIU7ZNo ratings yet
- Material Lab Al Quoze Industrial Area Dubai Phone 04-3405678, Fax 04-3405677 E. Mail: Mld@eim .AeDocument1 pageMaterial Lab Al Quoze Industrial Area Dubai Phone 04-3405678, Fax 04-3405677 E. Mail: Mld@eim .AeMalikNo ratings yet
- CPDprovider REALESTATESERVICE-2819Document8 pagesCPDprovider REALESTATESERVICE-2819Khristinne EligioNo ratings yet
- BAXA GarageList (Updated 20.04.2013)Document105 pagesBAXA GarageList (Updated 20.04.2013)Ashish KumarNo ratings yet
- Identifying Text Structure - TEACHERDocument2 pagesIdentifying Text Structure - TEACHERDelma LozanoNo ratings yet
- Mahendra MicaDocument113 pagesMahendra Micapatruni sureshkumarNo ratings yet
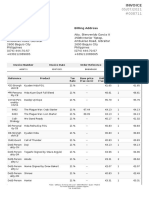
- Delivery Address Billing Address: Invoice Number Invoice Date Order Reference Order DateDocument2 pagesDelivery Address Billing Address: Invoice Number Invoice Date Order Reference Order DateBien_Garcia_II_1841No ratings yet
- Small & Medium Sized EnterpriseDocument71 pagesSmall & Medium Sized EnterpriseSajid Shaikh100% (1)
- Cloth BagDocument12 pagesCloth BagR C CHAUHAN CHARITABLE TRUSTNo ratings yet
- FY 2019 Summary Prpoposed Progams/Projects (In Thousand Pesos) School/Divison Tier 1 Tier 2 PS Mooe CO Rlip Total PS Mooe CO Mayag Nhs (JHS) 354Document34 pagesFY 2019 Summary Prpoposed Progams/Projects (In Thousand Pesos) School/Divison Tier 1 Tier 2 PS Mooe CO Rlip Total PS Mooe CO Mayag Nhs (JHS) 354Lex AmarieNo ratings yet
- Economic Environment in IndiaDocument5 pagesEconomic Environment in Indiascsangit20No ratings yet
- Chapter 6 Accounting For Foreign Currency TransactionDocument21 pagesChapter 6 Accounting For Foreign Currency TransactionMisganaw DebasNo ratings yet
- Laporan Tahunan AGII 2017 (Annual ReporDocument129 pagesLaporan Tahunan AGII 2017 (Annual Reporilmi khaerunisaNo ratings yet
- UNIT - 2 (Demand For Money) by - Mr. Vijay Kumar Dept. of Economics, Mob No. - 7549273042Document9 pagesUNIT - 2 (Demand For Money) by - Mr. Vijay Kumar Dept. of Economics, Mob No. - 7549273042Santosh dhabekarNo ratings yet
- TILEDocument72 pagesTILEnmjklNo ratings yet
- Alliance BankDocument5 pagesAlliance Bankbekza_159No ratings yet
- SIMULUS 8 Offline RegistrationDocument8 pagesSIMULUS 8 Offline RegistrationNeutral Body NursingNo ratings yet
- Answers: (C) (D) (D) (A) (C) (C)Document7 pagesAnswers: (C) (D) (D) (A) (C) (C)SWAPNIL JADHAVNo ratings yet
- Ikea Case StudyDocument20 pagesIkea Case StudySaurabh Pansare100% (1)
- C GTQ W4 N Pyvg PFedhDocument2 pagesC GTQ W4 N Pyvg PFedhAbhinav VermaNo ratings yet
- List of Statutory Instruments 2016 Up To 2016-11-04Document6 pagesList of Statutory Instruments 2016 Up To 2016-11-04miti victorNo ratings yet