You might also like
- Evasor de ObstaculoDocument76 pagesEvasor de Obstaculoskatep88No ratings yet
- Carri ToDocument12 pagesCarri ToEriicc GdaNo ratings yet
- Evasor de ObstaculosDocument20 pagesEvasor de Obstaculosmabeunica20038548100% (1)
- Carro Evasor de ObstaculosDocument13 pagesCarro Evasor de ObstaculosFidel Angel Baquero LagosNo ratings yet
- Proyect Robot Completo VHDLDocument9 pagesProyect Robot Completo VHDLHector CajilemaNo ratings yet
- IEEE Seguidor EvasorDocument5 pagesIEEE Seguidor EvasorMilton Jimenez100% (1)
- Laboratorio Seguidor de LineaDocument16 pagesLaboratorio Seguidor de LineaDaniel ZapataNo ratings yet
- Proyecto (Vehiculo Evasor de Obstaculos)Document7 pagesProyecto (Vehiculo Evasor de Obstaculos)Numa BaezNo ratings yet
- 2-2) Diseño de Un Robot Autonomo PDFDocument68 pages2-2) Diseño de Un Robot Autonomo PDFJorge Luis Vargas FloresNo ratings yet
- Arquitectura Interna Del MicrocontroladorDocument9 pagesArquitectura Interna Del MicrocontroladorUriel SolisNo ratings yet
- Actividad 2 Conversor ADC-DAC - 8Document8 pagesActividad 2 Conversor ADC-DAC - 8Jacobo QuinteroNo ratings yet
- Sistema Seguidor de LuzDocument6 pagesSistema Seguidor de LuzCesar Ordoñez OrtizNo ratings yet
- Sew Mdx61b EncoderDocument72 pagesSew Mdx61b EncoderEva SuárezNo ratings yet
- Investigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasDocument9 pagesInvestigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasLeonardo Romo100% (1)
- Seguidor de LíneaDocument8 pagesSeguidor de Líneacanoclara11No ratings yet
- Maquinas MooreDocument35 pagesMaquinas MooreDaniel GuerraNo ratings yet
- Semaforo (Digitales)Document8 pagesSemaforo (Digitales)Diego Perez FargeNo ratings yet
- Robot Seguidor de LineaDocument16 pagesRobot Seguidor de LineaAnaLupeP̶a̶x̶i̶No ratings yet
- Carro Evasor de Ostaculo ArduinoDocument6 pagesCarro Evasor de Ostaculo ArduinoJaime Aguilar CastellónNo ratings yet
- Carro Evasor de ObstaculosDocument14 pagesCarro Evasor de ObstaculosMiguel Angel Barrera CardenasNo ratings yet
- 6 Planificación de TrayectoriasDocument12 pages6 Planificación de TrayectoriasCarlos Avilés100% (1)
- Cuestionario - Correcion MrojasDocument2 pagesCuestionario - Correcion MrojasMilton Ricardo Rojas LunaNo ratings yet
- DISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)Document4 pagesDISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)joseiutNo ratings yet
- Convertidor de 12V DC A 120V AC AutomáticoDocument5 pagesConvertidor de 12V DC A 120V AC AutomáticoJaime PosadaNo ratings yet
- FUENTES CONSULTADAS: BATURONE, Aníbal Ollero. Robótica: Manipuladores y RobotsDocument141 pagesFUENTES CONSULTADAS: BATURONE, Aníbal Ollero. Robótica: Manipuladores y RobotsDavid A. D'LimaNo ratings yet
- Introducción A Los MicrocontroladoresDocument11 pagesIntroducción A Los MicrocontroladoresFrank Morales QuiñonesNo ratings yet
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloFrom EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloNo ratings yet
- Robot Seguidor de LuzDocument3 pagesRobot Seguidor de LuzJulian Jose Zapata ManjarresNo ratings yet
- Demultiplexor y MultiplexorDocument6 pagesDemultiplexor y MultiplexorStwart EspinozaNo ratings yet
- Caracterizacion Del Diodo de PotenciaDocument6 pagesCaracterizacion Del Diodo de PotenciaVictor ZhigueNo ratings yet
- Rectificadores Y RecortadoresDocument33 pagesRectificadores Y RecortadoresEraso del PoliNo ratings yet
- Temario MicrocontroladoresDocument2 pagesTemario MicrocontroladoresArchival RangelNo ratings yet
- Estacionamiento Automatizado Con ArduinoDocument15 pagesEstacionamiento Automatizado Con ArduinoEver PadillaNo ratings yet
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareFrom EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareNo ratings yet
- Amplificador Colector ComunDocument13 pagesAmplificador Colector ComunJorge Leonardo CamachoNo ratings yet
- Faja TransportadoraDocument21 pagesFaja TransportadoraDavid Ninaquispe Bardales100% (1)
- Circuitos InfrarrojosDocument10 pagesCircuitos InfrarrojosrickiaqpNo ratings yet
- Familia Microcontroladores Atmel y MotorolaDocument16 pagesFamilia Microcontroladores Atmel y MotorolaAntony Horna TrejoNo ratings yet
- Compuertas LogicasDocument27 pagesCompuertas Logicaszzzxxx666No ratings yet
- Resumen de Hoja de Datos PIC16F877Document21 pagesResumen de Hoja de Datos PIC16F87724santi100% (1)
- Módulo de ArranqueDocument2 pagesMódulo de Arranquehector moises torres suarezNo ratings yet
- Toolbox MatlabDocument8 pagesToolbox MatlabSergio SorucoNo ratings yet
- García Reig - Diseño y Fabricación de Un Brazo Robótico de 6 GDL de Bajo Coste Basado en ArduinoDocument69 pagesGarcía Reig - Diseño y Fabricación de Un Brazo Robótico de 6 GDL de Bajo Coste Basado en ArduinoSebastián Ferrer FerreNo ratings yet
- Multiplex OresDocument17 pagesMultiplex Oresyouacrazy100% (1)
- Tema 6 Teclado Digital DecimalDocument4 pagesTema 6 Teclado Digital Decimal2mercedesNo ratings yet
- Hoja Ejercicios 2 - Rele Zelio 2Document6 pagesHoja Ejercicios 2 - Rele Zelio 2Marcelo Adrian Quintana GutierrezNo ratings yet
- Reporte de Seguidor de LineaDocument10 pagesReporte de Seguidor de LineaRaymond KenneyNo ratings yet
- Sistemas Embebidos en La IndustriaDocument12 pagesSistemas Embebidos en La IndustriaanderelelectronicNo ratings yet
- Labo Cel 200Document4 pagesLabo Cel 200Danna MarcaNo ratings yet
- Seguidor de Linea BasicoDocument10 pagesSeguidor de Linea BasicoRaul CadeteNo ratings yet
- Robot Seguidor de LuzDocument4 pagesRobot Seguidor de LuzDario Fernando LópezNo ratings yet
- Accionar Motor PaP Unipolar Con 555 y CD4017Document2 pagesAccionar Motor PaP Unipolar Con 555 y CD4017Gabriel PSNo ratings yet
- Lab View y Spartan 3EDocument4 pagesLab View y Spartan 3EVictoria YánezNo ratings yet
- Laboratorio 3 Ce2-1 PDFDocument11 pagesLaboratorio 3 Ce2-1 PDFHECTOR GREGORIO QUISPE FLORESNo ratings yet
- Estructura Mecanica de Un RobotDocument21 pagesEstructura Mecanica de Un RobotPalmeras01No ratings yet
- INFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ADocument3 pagesINFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ASanti HernandezNo ratings yet
- FUP - Simulación Etapas-Semaforo Actividad 4Document9 pagesFUP - Simulación Etapas-Semaforo Actividad 4Jose Alejandro Fraile DuqueNo ratings yet
- Potncia2 PracticaDocument17 pagesPotncia2 PracticaEmilio Lovaton100% (1)
- Practica 2Document12 pagesPractica 2Charly BautistaNo ratings yet
- Ra U6 DigitalDocument7 pagesRa U6 Digitalbalderaesgar.reyNo ratings yet
- Momento Inicial - Jhon - CuervoDocument15 pagesMomento Inicial - Jhon - CuervoJhon CuervoNo ratings yet
- APORTEDocument6 pagesAPORTEJhon CuervoNo ratings yet
- Rolando Barrios Fase 0 ExplorarDocument8 pagesRolando Barrios Fase 0 Explorarrolandobarrios111No ratings yet
- Jhon - Cuervo - Fase Cero - ExplorarDocument7 pagesJhon - Cuervo - Fase Cero - ExplorarJhon CuervoNo ratings yet
- Cad para ElectrónicaDocument9 pagesCad para ElectrónicaJhon CuervoNo ratings yet
- Momento Inicial - Jhon - CuervoDocument15 pagesMomento Inicial - Jhon - CuervoJhon CuervoNo ratings yet
- Linea de TiempoDocument8 pagesLinea de TiempoJhon CuervoNo ratings yet
- Nestor Tiempos 91Document12 pagesNestor Tiempos 91Jhon CuervoNo ratings yet
- Fase 5 Procesamiento Analogico de SeñalesDocument15 pagesFase 5 Procesamiento Analogico de SeñalesJhon CuervoNo ratings yet
- Introducción Rápida A Matlab y Simulink para Cienc... - (PG 13 - 52)Document40 pagesIntroducción Rápida A Matlab y Simulink para Cienc... - (PG 13 - 52)Jhon CuervoNo ratings yet
- Investigacion PC Dispositivos JuanCifuentesDocument3 pagesInvestigacion PC Dispositivos JuanCifuentesJhon CuervoNo ratings yet
- Aporte Inicial - 3 - Jhon - CuervoDocument49 pagesAporte Inicial - 3 - Jhon - CuervoJhon CuervoNo ratings yet
- Matlab r2006bDocument62 pagesMatlab r2006bTony OcampoNo ratings yet
- Aspectos Relevantes Unidad 2 Jhon CuervoDocument4 pagesAspectos Relevantes Unidad 2 Jhon CuervoJhon CuervoNo ratings yet
- Aspectos Relevantes Lecturas Unidad2 - JHON - CUERVODocument5 pagesAspectos Relevantes Lecturas Unidad2 - JHON - CUERVOJhon CuervoNo ratings yet
- Autómatas Finitos Jhon CuervoDocument11 pagesAutómatas Finitos Jhon CuervoJhon CuervoNo ratings yet
- Actividad 1Document2 pagesActividad 1Jhon CuervoNo ratings yet
- Sistemas DinámicosDocument7 pagesSistemas DinámicosNelson Quintana100% (1)
- Actividad 1 Presentación PersonalDocument1 pageActividad 1 Presentación PersonalJhon CuervoNo ratings yet
- Convertidor Ac AcDocument13 pagesConvertidor Ac AcPedro Beltran100% (1)
- 1 - TCPaso1Document10 pages1 - TCPaso1Jhon CuervoNo ratings yet
- Quiz #1Document4 pagesQuiz #1Jhon CuervoNo ratings yet
- Aspectos Relevantes Unidad1 - Jhon CuervoDocument5 pagesAspectos Relevantes Unidad1 - Jhon CuervoJhon CuervoNo ratings yet
- Circuito Convertidor DC DC, DC, ACDocument7 pagesCircuito Convertidor DC DC, DC, ACJhon CuervoNo ratings yet
- Quiz #1Document4 pagesQuiz #1Jhon CuervoNo ratings yet
- Un Circuito CMOS Está Compuesto PorDocument3 pagesUn Circuito CMOS Está Compuesto PorJhon CuervoNo ratings yet
- Mcontrol DigitalDocument96 pagesMcontrol DigitalJulian Coy100% (1)
- Fabricacion Chips 061009 PDFDocument45 pagesFabricacion Chips 061009 PDFJhon CuervoNo ratings yet
- Procesamiento Digital de Señales. Jose Pablo Alvarado MoyaDocument247 pagesProcesamiento Digital de Señales. Jose Pablo Alvarado MoyaJorge BuenoNo ratings yet
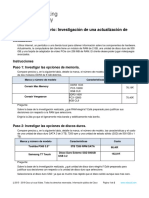
- 3.4.1.7 Lab - Research A Hardware Upgrade 2 PDFDocument2 pages3.4.1.7 Lab - Research A Hardware Upgrade 2 PDFBrawl Star67% (3)
- Examen Finales 2do Semestre 2023.Xlsx Finales - 1ra RecuperaciónDocument3 pagesExamen Finales 2do Semestre 2023.Xlsx Finales - 1ra RecuperaciónAlexanderNo ratings yet
- Autómatas Programables TIA Portal: 2. Elementos de Un Sistema AutomatizadoDocument40 pagesAutómatas Programables TIA Portal: 2. Elementos de Un Sistema Automatizadoapac guardaNo ratings yet
- Capacidades y Especificaciones de Aceites Equipos KomatsuDocument2 pagesCapacidades y Especificaciones de Aceites Equipos KomatsuEdin Raul Yalle RafaelNo ratings yet
- 1° y 2° Revolucion IndustrialDocument2 pages1° y 2° Revolucion IndustrialGraciela RodríguezNo ratings yet
- Normas Basicas para ArchivarDocument10 pagesNormas Basicas para ArchivarVictor Hugo Flores IsunzaNo ratings yet
- CPC 100 CP TD15 CP CR600 Article Rotating Machines Testing OMICRON Magazine 2019 ESPDocument2 pagesCPC 100 CP TD15 CP CR600 Article Rotating Machines Testing OMICRON Magazine 2019 ESPJulioNo ratings yet
- Mantenimiento de Calderas Industriales PortafolioDocument4 pagesMantenimiento de Calderas Industriales PortafolioMarco RamosNo ratings yet
- °° - Portafolio de Evidencia ELEC19003 - ArturoDocument14 pages°° - Portafolio de Evidencia ELEC19003 - ArturoArturito NotificaNo ratings yet
- Guia de Comisionamiento Huawei Nodo BDocument19 pagesGuia de Comisionamiento Huawei Nodo BAlex JonathanNo ratings yet
- IstringstreamDocument4 pagesIstringstreamsanta bárbaraNo ratings yet
- InformelabDocument7 pagesInformelabGarcía Emilio ENo ratings yet
- Ingenieria de Software Eje 2Document17 pagesIngenieria de Software Eje 2Keiner ZarateNo ratings yet
- ProyectoDocument21 pagesProyectoXavier VillegasNo ratings yet
- Analizar Espectro Utilizando Wifi AnalyzerDocument4 pagesAnalizar Espectro Utilizando Wifi AnalyzerpepeNo ratings yet
- Cierre CentralizadoDocument5 pagesCierre CentralizadoJuan UruarteNo ratings yet
- Agroindustria y AgroecologiaDocument7 pagesAgroindustria y AgroecologiaJuan Camilo GarciaNo ratings yet
- Activos Calderas 15-03-2015Document33 pagesActivos Calderas 15-03-2015youmber GimenezNo ratings yet
- Operaciones de FresadoDocument5 pagesOperaciones de FresadoDayra PitaNo ratings yet
- Modelo Semana 3Document20 pagesModelo Semana 3Elvis Ramirez CalzadaNo ratings yet
- Cómo Probar El Sensor TPSDocument6 pagesCómo Probar El Sensor TPScirino72No ratings yet
- Ausencia de Sonido en WindowsDocument20 pagesAusencia de Sonido en Windowsjawhmysp13No ratings yet
- Multivibrador Astable y SchmittDocument7 pagesMultivibrador Astable y SchmittAdrian Coto Cordoba1No ratings yet
- Directorio Telefónico Matriz DgacDocument11 pagesDirectorio Telefónico Matriz DgacJuan Carlos PASQUEL G.No ratings yet
- Teka LP8 810 DishwasherDocument28 pagesTeka LP8 810 DishwasherJcorraNo ratings yet
- Certifica: Página 1 de 7Document7 pagesCertifica: Página 1 de 7Adrian Muñoz GonzalesNo ratings yet
- Presentacion Fundamentos de La ProgramaciónDocument16 pagesPresentacion Fundamentos de La ProgramaciónMICHELLE FERNANDA SOTO SANCHEZNo ratings yet
- Conceptos Fundamentales de Subestaciones EléctricasDocument57 pagesConceptos Fundamentales de Subestaciones EléctricasAngel De Jesus Olvera Barrera100% (1)
- Solucion A4 Creacion de Sobrepresion v2Document3 pagesSolucion A4 Creacion de Sobrepresion v2Arq CamonisNo ratings yet
- TH-F-17 Perfil Técnico Asistente PC-1Document2 pagesTH-F-17 Perfil Técnico Asistente PC-1Andrey Perez NovaNo ratings yet