You might also like
- Les carnets de construction et vol du cerf-volant: envie de voler plus hautFrom EverandLes carnets de construction et vol du cerf-volant: envie de voler plus hautRating: 5 out of 5 stars5/5 (1)
- TP 03 EngrenagesDocument13 pagesTP 03 EngrenagesAli MaansriNo ratings yet
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Chap 2 EngrenagesDocument19 pagesChap 2 EngrenagesMhd Koundio100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- Treuil HydrauliqueDocument4 pagesTreuil Hydraulique1s1rulliersandNo ratings yet
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceFrom EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo ratings yet
- RoulementsDocument8 pagesRoulementsred lemNo ratings yet
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriNo ratings yet
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhNo ratings yet
- Visserie, Boulonnerieetécrous 1681413364763Document21 pagesVisserie, Boulonnerieetécrous 1681413364763Coumba DialloNo ratings yet
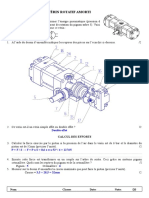
- TD - Vérin Rotatif AmortiDocument5 pagesTD - Vérin Rotatif AmortiLAILA BNNo ratings yet
- DR03 Transmission CDocument5 pagesDR03 Transmission CAbdellah FaqdaniNo ratings yet
- Fasicule TP CAODocument125 pagesFasicule TP CAOLynda JerbiaNo ratings yet
- Chapitre 2 PMCN PDFDocument16 pagesChapitre 2 PMCN PDFJimmy DBNo ratings yet
- Tour ParallèleDocument10 pagesTour ParallèleltaifNo ratings yet
- FAST IntialeDocument1 pageFAST IntialeFatma BenbrahimNo ratings yet
- Accouplement CoursDocument4 pagesAccouplement CoursElarbi JaffelNo ratings yet
- Les AccouplementsDocument4 pagesLes Accouplementsben salem NaofelNo ratings yet
- Bielle ManivelleDocument4 pagesBielle ManivelleMohamed EljotariNo ratings yet
- Act (Fraiseuse Universelle) P137-142Document6 pagesAct (Fraiseuse Universelle) P137-142Kereme JulienNo ratings yet
- Choix D'un AccouplementDocument4 pagesChoix D'un AccouplementSlim KanounNo ratings yet
- Chap. 0 - Généralités Sur Les OTP PDFDocument4 pagesChap. 0 - Généralités Sur Les OTP PDFDramane KeitaNo ratings yet
- SII Fraise MèreDocument12 pagesSII Fraise MèreJules WillardNo ratings yet
- 16-Polie Courroie PDFDocument2 pages16-Polie Courroie PDFHanane TounsiNo ratings yet
- Accouplement Permanent SDocument11 pagesAccouplement Permanent SFaiza GarNo ratings yet
- Bureau Des Méthodes Gam Capot PliageDocument1 pageBureau Des Méthodes Gam Capot Pliagematrani100% (1)
- Usinage FraisageDocument33 pagesUsinage FraisageMarwane NasserNo ratings yet
- Rapport Complet PFEDocument42 pagesRapport Complet PFEthekrumpNo ratings yet
- TD-Poulie Embrayage Centrifuge PFDDocument5 pagesTD-Poulie Embrayage Centrifuge PFDbhsbhs19No ratings yet
- 2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageDocument4 pages2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageAdam BensaidNo ratings yet
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينNo ratings yet
- TCM ESTetudiant2018Document224 pagesTCM ESTetudiant2018G- MobileNo ratings yet
- PolyGlissiere A TrouDocument18 pagesPolyGlissiere A TrouHassenKhlifiNo ratings yet
- TP de TPM FinDocument17 pagesTP de TPM FinJuge “JMK” Mpanga kabojyaNo ratings yet
- Les Courroies - ExercicesDocument4 pagesLes Courroies - ExercicesDjamel DjamNo ratings yet
- 13 Calcule Des EngrenagesDocument18 pages13 Calcule Des EngrenagesANDAHMOUNo ratings yet
- Corrigé TD-5 - TD de SynthèseDocument5 pagesCorrigé TD-5 - TD de SynthèseAljawhara SaraNo ratings yet
- SNT Ri40 - DTDocument3 pagesSNT Ri40 - DTBoris Cathérin Vidjannagni DOHOUNo ratings yet
- Taillage D'engrenages À L'outil Ou Fraise Module: I Définition - DescriptionDocument5 pagesTaillage D'engrenages À L'outil Ou Fraise Module: I Définition - Descriptionbassem kortasNo ratings yet
- Les Accouplements PDFDocument28 pagesLes Accouplements PDFKhaled Souaissa100% (1)
- Avantages Et Inconvenients Des RoulementsDocument7 pagesAvantages Et Inconvenients Des Roulementsprojet5millionNo ratings yet
- EngrenagesDocument12 pagesEngrenagesMouwadine Moussa100% (1)
- Tournage 1Document16 pagesTournage 1Bilel BoulehmiNo ratings yet
- Ing Mec Mini ProjDocument9 pagesIng Mec Mini ProjMOHAMED CHERIF KHATRAOUINo ratings yet
- 4 Chapitre2 PDFDocument17 pages4 Chapitre2 PDFmaizayosrNo ratings yet
- Cours CFAO-ESPRIM - 2019-2eme PartieDocument33 pagesCours CFAO-ESPRIM - 2019-2eme Partiejunior NgoyoNo ratings yet
- TH8115Document129 pagesTH8115dado djanatiNo ratings yet
- 1.CH5 - Centre D'usinage CNCDocument8 pages1.CH5 - Centre D'usinage CNCgono playerNo ratings yet
- Exercices Des Trains EpicycloidauxDocument3 pagesExercices Des Trains Epicycloidauxmohamedaloui294No ratings yet
- Rapport RoulementDocument7 pagesRapport RoulementChristian Nkomayombi100% (1)
- TD 4 Réducteur Par EngrenagesDocument4 pagesTD 4 Réducteur Par EngrenagesYacouba OuedraogoNo ratings yet
- Cours RessortsDocument29 pagesCours Ressortschaymae amarNo ratings yet
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNANo ratings yet
- Limiteur de CoupleDocument24 pagesLimiteur de CoupleNeoXana01No ratings yet
- III. Calcul Des RessortsDocument3 pagesIII. Calcul Des RessortsSamar ArbiNo ratings yet
- 1306 160 p32 PDFDocument12 pages1306 160 p32 PDFMohamed Amine SaadaNo ratings yet
- SynchronisationDocument14 pagesSynchronisationquereurNo ratings yet
- ENGRENAGESDocument10 pagesENGRENAGESBojane100% (2)
- Mrcimi LH PDFDocument45 pagesMrcimi LH PDFMohamed Lalioui100% (1)
- 82 Alg Algebre 2850696978 ContentDocument107 pages82 Alg Algebre 2850696978 ContentMohamed Lalioui100% (1)
- Mise en Forme Du Zinc Et de Ses Alliages: Ronald RACEKDocument10 pagesMise en Forme Du Zinc Et de Ses Alliages: Ronald RACEKMohamed LaliouiNo ratings yet
- Plasticité en Mise en Forme: Métaux À FroidDocument17 pagesPlasticité en Mise en Forme: Métaux À FroidMohamed LaliouiNo ratings yet
- Inpl T 1992 Roch F PDFDocument179 pagesInpl T 1992 Roch F PDFMohamed LaliouiNo ratings yet
- Les Conditions de CoupesDocument15 pagesLes Conditions de CoupesNeoXana01No ratings yet
- MMCDocument141 pagesMMCMohamed LaliouiNo ratings yet
- Engrenages 2Document7 pagesEngrenages 2Mohamed LaliouiNo ratings yet
- CM4 Dimensionnement VisDocument27 pagesCM4 Dimensionnement VisMohamed LaliouiNo ratings yet
- Défauts de FonderieDocument20 pagesDéfauts de FonderieMohamed Lalioui100% (2)
- Cours Vprocess PDFDocument47 pagesCours Vprocess PDFMohamed LaliouiNo ratings yet
- MMCDocument141 pagesMMCMohamed LaliouiNo ratings yet
- Ann BacDocument126 pagesAnn BacMohamed LaliouiNo ratings yet
- Mécanique Du Point 1 Dérivées de Toutes Les CoordonnéesDocument7 pagesMécanique Du Point 1 Dérivées de Toutes Les CoordonnéesMohamed LaliouiNo ratings yet
- Séries de FourierDocument152 pagesSéries de FourierMohamed LaliouiNo ratings yet
- Cours PPTschemacineDocument25 pagesCours PPTschemacineboys-hakars100% (1)
- Cours Sur Les Bascules PDFDocument4 pagesCours Sur Les Bascules PDFAmineAb100% (1)
- Définition D'un Ensemble en CompréhensionDocument2 pagesDéfinition D'un Ensemble en CompréhensionMohamed Lalioui100% (1)
- Mécanique Du Point 1 Cinématique PDFDocument19 pagesMécanique Du Point 1 Cinématique PDFMohamed LaliouiNo ratings yet
- Logique Combinatoire-P1Document13 pagesLogique Combinatoire-P1Mohamed LaliouiNo ratings yet
- Logique Combinatoire-P1Document13 pagesLogique Combinatoire-P1Mohamed LaliouiNo ratings yet
- Equivalence Des SuitesDocument2 pagesEquivalence Des SuitesMohamed LaliouiNo ratings yet
- Les Noyaux PDFDocument4 pagesLes Noyaux PDFMohamed LaliouiNo ratings yet
- Fiche Metiers SOM Groupe ORTECDocument2 pagesFiche Metiers SOM Groupe ORTECissamouneNo ratings yet
- td1 AutomatismeDocument6 pagestd1 AutomatismeDhoha GasmiaNo ratings yet
- Cata Sati Tunisia 2012Document212 pagesCata Sati Tunisia 2012Soltani AliNo ratings yet
- Copie de Version Finale Mémoire SALIHOU SAÏDOU PDFDocument94 pagesCopie de Version Finale Mémoire SALIHOU SAÏDOU PDFmohamadouNo ratings yet
- Projet de Travaux Pratiques Programmation PascalDocument5 pagesProjet de Travaux Pratiques Programmation PascalLachi.RNo ratings yet
- SRM Personnes 2019Document92 pagesSRM Personnes 2019LefevreNo ratings yet
- Cahors - Chambres de TirageDocument12 pagesCahors - Chambres de TirageRakotojaona HajanirinaNo ratings yet
- Formation Rsa2010 Partie 1 La ModelisationDocument53 pagesFormation Rsa2010 Partie 1 La ModelisationYouness Boudaoud67% (3)
- Formations Les Essentielles Les Fondamentaux de La Business AnalyseDocument1 pageFormations Les Essentielles Les Fondamentaux de La Business AnalysecomboudriNo ratings yet
- Premior Mat - FRDocument3 pagesPremior Mat - FRgogoNo ratings yet
- E Logistique e CommerceDocument45 pagesE Logistique e Commercemedpro970% (1)
- Le Directeur de La Planification, de L'administration Et Des FinancesDocument20 pagesLe Directeur de La Planification, de L'administration Et Des FinancesRachel ToniNo ratings yet
- Dce AepDocument208 pagesDce AepAlimatine BogniniNo ratings yet
- Sujet de Management Des RisquesDocument2 pagesSujet de Management Des RisquesMartial KouassiNo ratings yet
- ONIGCDocument25 pagesONIGCFranklin Tousse KenneNo ratings yet
- Outils D'évaluation Des Risques ProfessionnelsDocument9 pagesOutils D'évaluation Des Risques ProfessionnelsFouad ElhajjiNo ratings yet
- Rapport FinaleDocument27 pagesRapport FinaleYassine Aallalou100% (1)
- DCE ASC - CSE 26 07 09 - SoumisDocument20 pagesDCE ASC - CSE 26 07 09 - SoumisNabil KhouyaNo ratings yet
- Tunisie ETUDE FTTHDocument27 pagesTunisie ETUDE FTTHzoomtn86% (7)
- Chapitre 2, Diagrammes de Fiabilité Ou Diagrammes de SuccesDocument12 pagesChapitre 2, Diagrammes de Fiabilité Ou Diagrammes de Successimo jinNo ratings yet
- Poly VDocument32 pagesPoly VJamel CharefNo ratings yet
- ZXD FR FRDocument7 pagesZXD FR FRPântea BogdanNo ratings yet
- HAMIDI YoussefDocument95 pagesHAMIDI YoussefAhmad WhabiNo ratings yet
- Présentation Gestion de Stock KhaoulaDocument33 pagesPrésentation Gestion de Stock KhaoulaIMad IMad100% (1)
- Communication Par Satellite Cours PDFDocument2 pagesCommunication Par Satellite Cours PDFDanielNo ratings yet
- Conception Et Dimensionnement D'une 'Aérogare Passagers de Beni-Mavivi Dans La Ville de Beni, Nord-Kivu.Document81 pagesConception Et Dimensionnement D'une 'Aérogare Passagers de Beni-Mavivi Dans La Ville de Beni, Nord-Kivu.Eliezer MalelaNo ratings yet
- Mcu A Transmission de PuissanceDocument1 pageMcu A Transmission de PuissancesedmorabetNo ratings yet
- 1 Fondamentaux Gestion de Projet HestimDocument36 pages1 Fondamentaux Gestion de Projet HestimjikijokoNo ratings yet
- Les Modes de PRODDocument14 pagesLes Modes de PRODAsma EzziNo ratings yet
- Expose VRDDocument29 pagesExpose VRDGérard Claude EssomeNo ratings yet