You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Smart-L MM/F: Long Range Multi Mission RadarDocument2 pagesSmart-L MM/F: Long Range Multi Mission RadarCarakaNo ratings yet
- 230-Ford-Ranger-Factory-Service-Repair-Manual-2011-to-2015 WSM PDFDocument1,257 pages230-Ford-Ranger-Factory-Service-Repair-Manual-2011-to-2015 WSM PDFH Dy100% (1)
- Cdcomplete PDFDocument164 pagesCdcomplete PDFMarian Placzek100% (2)
- Supp CDocument65 pagesSupp CHoNestLiArNo ratings yet
- OSI vs TCP/IP Communication Protocols ExplainedDocument33 pagesOSI vs TCP/IP Communication Protocols ExplainedKiran ZahraNo ratings yet
- Assignment On Satellite Transponder MD Saif H2016124031 Mounesh H2016124024 Department of Electronics and Communication BITS Pilani Hyderabad CampusDocument26 pagesAssignment On Satellite Transponder MD Saif H2016124031 Mounesh H2016124024 Department of Electronics and Communication BITS Pilani Hyderabad CampusMounesh PanchalNo ratings yet
- Yanmar 98Document3 pagesYanmar 98manuelsaenzNo ratings yet
- Sherlock Whole ThesisDocument94 pagesSherlock Whole ThesisKimNo ratings yet
- Death of Crypto King Nikolai Mushegian Fuels Conspiracy TheoriesDocument15 pagesDeath of Crypto King Nikolai Mushegian Fuels Conspiracy Theorieshans hansenNo ratings yet
- 2008 - Review of Methods in Technology AssessmentDocument10 pages2008 - Review of Methods in Technology AssessmentpalmiereNo ratings yet
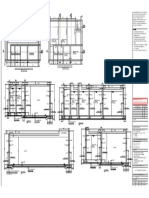
- U.G Tank Plan & Details 05-03-18-Foundation & Details PDFDocument1 pageU.G Tank Plan & Details 05-03-18-Foundation & Details PDFbaroraNo ratings yet
- Student Instructions Porcupine PPEDocument6 pagesStudent Instructions Porcupine PPEAndrea XiaoNo ratings yet
- Senior Officer General (10146) - 2020Document1 pageSenior Officer General (10146) - 2020Moumon DasNo ratings yet
- For AgentsDocument16 pagesFor AgentsPranesh GajendragadNo ratings yet
- Experienced Java Developer ResumeDocument8 pagesExperienced Java Developer ResumeparitoshsoodNo ratings yet
- Virtual Manipulatives NCTM ArticleDocument6 pagesVirtual Manipulatives NCTM Articleapi-171857844No ratings yet
- Catalogue Standard Air Handling Units Blauair PDFDocument24 pagesCatalogue Standard Air Handling Units Blauair PDFIonut CatalinNo ratings yet
- Ultrasonic Flow Detection: Miii-1Document10 pagesUltrasonic Flow Detection: Miii-1jishnusajiNo ratings yet
- GPlay Setup 16745Document7 pagesGPlay Setup 16745Ciurlic IulianNo ratings yet
- D-Link AC750 User ManualDocument101 pagesD-Link AC750 User Manualibcunha100% (1)
- Tata Steel IdeationDocument13 pagesTata Steel IdeationAnu SinghNo ratings yet
- UART Component Examples and Interrupt-Driven Serial CommunicationDocument5 pagesUART Component Examples and Interrupt-Driven Serial CommunicationCarlos Morales CarbajalNo ratings yet
- Viking: Product ManualDocument26 pagesViking: Product ManualCristian RobiconNo ratings yet
- 709 Cab CO2 Weld ReductionDocument68 pages709 Cab CO2 Weld ReductionVishwarath TaduruNo ratings yet
- Device Integration Cisco WLCDocument6 pagesDevice Integration Cisco WLCSpyman_pcNo ratings yet
- Vibration and Pulsation Analysis SolutionsDocument12 pagesVibration and Pulsation Analysis Solutions4jawwy markme026No ratings yet
- Allotement LetterDocument2 pagesAllotement LetterDarshan SolankiNo ratings yet
- Media Studies at AQADocument39 pagesMedia Studies at AQAAna-Maria Huluban0% (1)
- Fabric Ducting & Diffusers: Technical DataDocument32 pagesFabric Ducting & Diffusers: Technical DataruwangaroshalNo ratings yet
- Advanced Voice Recognition Systems v. AppleDocument15 pagesAdvanced Voice Recognition Systems v. AppleMacRumors0% (1)