Professional Documents
Culture Documents
TOFD
TOFD
Uploaded by
destonhenson100%(1)100% found this document useful (1 vote)
61 views194 pagesTOFD Inspection
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentTOFD Inspection
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
100%(1)100% found this document useful (1 vote)
61 views194 pagesTOFD
TOFD
Uploaded by
destonhensonTOFD Inspection
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 194
TIME - OF - FLIGHT DIFFRACTION COURSE
(Level I and ID)
Prepared by Reviewed by | Approved by _| Date Revision number
Print_P. Carter J.M.Pitcher_ T.J.Anmitt 15/8/97 06
Sign’ 06/08/1999
ISSUE 1 FEB 2000
DEFINITIONS
Figure 1 Co-ordinate System
The following symbols are used in the text,
© velocity of sound
2. wavelength of sound
depth of reflector below scanning surface
D thickness of sample being scanned
parallel scan in which direction of beam parallel to direction of scan
non-parallel _ scan in which direction of beam normal to direction of scan
PCS _ probe centre separation
s half of probe centre separation 2s
t time of flight of signal from a reflector
21) time taken for sound to pass through two probe shoes, i.e. probe delay
ti time of flight of lateral wave
i» time of flight of back wall signal
© angle of beam centre with respect to normal to metal surface
y beam cone half-angle
St timing error
Sd depth error
&c error in velocity
3s errorin probe separation
SH error in change in couplant thickness
h error in variation of surface height
ISSUE 1 FEB 2000 ii
CONTENTS
TIME - OF - FLIGHT DIFFRACTION COURSE.
(Level I and 11.
DEFINITIONS
CONTENTS,
1, INTRODUCTION.
1.1 Scope of the Course...
1.2 Requirement
1.3 Examination :
2, BACKGROUND AND CONVENTIONAL ULTRASONIC TESTING
2.1 Background to Non Destructive Testin,
2.2 Ultrasonic Non-Destructive Testing.
2.3 Pulse-echo detection of flaws....
2.4 Flaw Sizing with the Pulse-echo Technique
2.5 Comparison of Flaw Sizing Accuracy for different Techniques
3. THE TIME-OF-FLIGHT DIFFRACTION TECHNIQUE.
3.1 Background to the Importance of the TOFD Techniqui
3.2. History of TOFD Development... a
3.3 Principle of TOFD.
3.3.1 Diffraction proc
3.3.2 Angular Variation of Diffraction Signals.
3.3.3 Basic TOFD Set-up ..
3.3.3.1 Probe type and wave typ
3.3.3.2 Signals observed.
3.3.3.3 Phase Relationships.
3.3.3.4 Depth Calculation...
3.3.3.5 Measurement of Time and initial Probe-Centre-Separation .
3.3.3.6 Patterns for Surface breaking Defect
3.4 Types of TOFD Scan.
3.5 Main Uses Of TOFD.
3.6 Summary of Advantages and Disadvantages of TOFD
3.7 Basic Steps in the Sizing or Detection of Flaws
4, DATA COLLECTION SYSTEM...
4.1 Basic Hardware
ISSUE 1 FEB 2000 iii
4.2 Advantage of Digital Recording...
4.3 Digitisation of the Analogue Ultrasonic Signals
4.3.1 Amplitude.
4.3.2 Sampling Rate
4.4 Selection of frequencies for filterin;
4.5 Amount of data collected during an inspection.
4.6 Grey scale imaging and B-scans.
4.7 Signal Averaging.
4.8 Pulse Width Control...
4.9 Pulse Repetition Frequency...
4.10 Software . é
410.1 Omeline..en
4.10.2 Analysis and Of-line facilities.
. DESIGN OF TOFD INSPECTION.
5.2 Beam Spread Considerations
5.2.1 Basies for calculation of beam spread.
5.2.2 Example of selection of number of seans for an inspection.
5.3 Examination of Material to be Inspected.
5.4 Choice of Probe Angle.
5.5 Choice of Probe Frequency.
5.6 Choice of Probe-Centre-Separation
5.7 Calibration and Setting of Gain.
5.7.1 Gain is not dependent on reflector siz...
5.7.2 Use of diffraction signal from slots to set gain....
5.7.3 Use of grain noise or “grass” to set the gain...
5.7.4 Effect of attenuation or coarse grain noise on gain setting.
5.1.5 Calibration or checking of the inspection set up.
5.8 Digitisation Rate and Pulse Repet
5.9 Region of A-scan to be Digitised
5.10 Signal Averaging and Pulse-width.
5.11 No signals - Common faults
5s
z
f
E
<
Z
z
5
£
2
é
:
@
5.12.1 General...
5.12.2 Manual Scanning.
5.12.3 Mechanical Scanning
5.12.4 Sampling Interval
5.13 Temperature.
5.14 Couplant.
5.15 Special Techniques...
5.15.1 Double Skip
5.15.2 Use of Mode Converted Echoes .
5.15.3 Use of Off-Axis Scans...
5.16 Summary of Choice of Parameters for a TOFD Scan
6. ERRORS...
6.1 Introduction
6.2 Timing Errors..
ISSUE 1 FEB 2000 iv
6.3 Near surface Problems
6.4 Dead Zones...
6.4.1 Lateral wave dead zone
6.4.2 Backwall Dead Zone
6.5 Off-Axis Error and Back Wall Blind Zone ..
6.5.1 Off-axis depth error.
6.5.2 Back wall blind zone..
6.6 Spatial Resolution of embedded defects
6.7 Effect of change in Probe ee and Importance of Calibration with Lateral
and Back wall signals...
6.7.1 Change in Probe Separation..
6.7.2 Importance of Calibratior
6.8 Errors in couplant depth, surface height variations and velocity
6.8.1 Error due to variations in couplant depth
6.8.2 Error due to variations in cae profile
6.8.3 Velocity error
6.9 Index Point Migration Errors...
6.10 Other Errors
6.11 Multiple Ares..
6.12 Large Grained Materials.
6.12.1 General
6.12.2 Cladding.
6.13 Overall Errors and Monitoring Growth..
6.13.1 Overall Errors
6.13.2 Monitoring Defect Growt poe
6.14 Estimate of Flaw Length from a TOFD D-Scan .. 78
6.14.1 Introduction
6.14.2 Estimation of length for flaws with profiles parallel to the metal surface .. 78
6.14.2.1 Use of shaped cursor representing a point source...
6.14.2.2 Measurement of beam spread...
6.14.2.3 Use of the SAFT technique to measure lengt i
6.14.3 Estimation of length for flaws with curved profiles (rear surface breaking)80
6.14.4 Conelusio
7 DATA ASSESSMENT - FLAW CHARACTERISATION
7.1 Basic analysis..
7.2 Introduction to Characterisation
7.3 Shear Waves...
7.4 Pores and Slag in TOFD Records
7.5 Internal Cracks
7.6 Upper Surface Breaking Cracks.
7.7 Lower Surface Breaking Cracks.
7.8 Effect of changing Defect Profile.
7.9 Weld Root Flaws and Backwall Features
7.10 Crack Transparency.
7.11 Transverse Flaws
7.12 Uncategorized Flaws
7.13 Additional Scans for Detailed Characterisation
ISSUE 1 FEB 2000 v
8 ANALYSIS SOFTWARE.
9.
10 REPORTING...
11 PROCEDURE WRITING
12 EQUIPMENT AND PROBE CHECKS.
13. TOFD TRIALS AND VALIDATIONS...
APPENDIX 1 OFF-AXIS DEPTH ERROR...
7.14 Acceptance Criteria
8.1 Linearisation.
8.2 Lateral/Back wall Straighten and Removal
8.3 Parabolic Cursor.
8.4 Synthetic Aperture Focusing Technique - SAF
8.5 Split Spectrum Processing. 99
8.6 Locus plots. 99
CURVED SURF. 101
9.1 Curved Surfaces 101
9.2 Complex Geometry
12.1 Equipment Checks.
12.1.1 Screen Height Linearity
12.1.2 Amplitude Lineari
12.1.3 Time Base Linearity
12.14 Probe Index Emission Point.
12.1.5 Beam Angle
12.1.6 Beam Spread
12.1.7 TOFD Combined Probe Delay.
12.1.8 Sensitivity .
12.1.9 Resolution.
12.2 Probe checks
12.2.1 Material Velocity Measurement.
12.2.2 Probe Frequency...
12.2.3 Probe Pulse Length.
12.3 Check of Attenuation in Material.
13.1 Introduction...
13.2 UK Defect Detection Trials.
13.3 PISC II Trails... :
13.4 PISC II Trials.
13.5 Other Validation Exercises
13.5.1 Welding Institute Collaborative Programme.
13.5.2 Offshore Structures
13.5.3 Validation Work at the EPRI NDE Centre USA...
13.54 NIL Project- Non-Destructive Testing of Thin Plate .
13.5.5 Evaluation of TOFD in a 350 mm test block, 1998
A1.1 Theoretical Derivation of Off-Axis Depth Error
A1.2 Example of Variation of Depth Error with Off-Axis Distance ..
1.3 Depth Error at Edge of Ultrasonic Beam
AL3.1 General Situation..
A1.3.2 When Beam Centres aimed at 2/3 Depth of Samp
1.3.3 When Beam Centres aimed at Backwall..
ISSUE 1 FEB 2000 vi
AL4 Depth Error at Edge of Weld.
A1.4.1 Single ‘V’ Weld...
1.4.2 Double ‘V’ Weld
ALS Conclusion:
APPENDIX 2. DETERMINATION OF DEPTH FOR OFF-AXIS FLAWS IN A NON-
PARALLEL SCAN USING MODE CONVERTED WAVES. 133,
APPENDIX 3 STEP BY STEP GUIDE TO A TOFD INSPECTION..
3.1 Data Collection.
A3.2 Analysi
A3.3 Processing the Data.
43.3.1 Lateral/backwall Straighten/Removal
43.3.2 Linearisation..
A33.3 SAFT
A3.3.4 Examine A-scan display.
A3.3.5 Select Part of an Image.
A3.3.6 Profiling.
A3.3.7 Echodynamic:
A3.3.8 Fourier Transform
APPENDIX 4 PRINTING DAT;
A4.1 REPGEN ...
A4.2 BMP File
APPENDIX 5 TOFDAIDS SOFTWARE PACKAGE.
INDEX
FIGURES......
ISSUE 1 FEB 2000 vii
FIGURES
Figure 1 Co-ordinate System.
Figure 2.1 Flaw size in relation to beam spread.
Figure 2.2 Determination of Flaw Size by 64B Drop Sizing.
Figure 3.1 Illustration of importance of accurate sizing measurements.
Figure 3.2 Representation of the Diffraction Process from Crack Tips...
Figure 3.3 Illustration of Diffraction..
Figure 3.4 Calculated Variation of Amplitude of Diftracted Waves with Angle .
Figure 3.5 Cross Section of Typical Probe.
Figure 3.6 Wave Paths for the TOFD Arrangement
Figure 3.7 A-scan with no Defect Present.
Figure 3.8 A-scan with Defect Present
Figure 3.9 Basic TOFD parameters.
Figure 3.10 Consistent measurement of time of various cae f
Figure 3.11 Surface opening crack in a non-parallel scan...
Figure 3.12 Surface opening cracks on the back wall for a non-parallel sean
Figure 3.13 Non-Parallel or Longitudinal Scan
Figure 3.14 Parallel or Transverse Scan.
Figure 3.15 Difference between a non-parallel and a parallel scan.
Figure 3.16 Uncertainty in lateral position in a non-parallel scan
Figure 4.1 Typical Digital System for collecting TOFD Data
Figure 4.2 Digitisation of an A-scan _
Figure 4.3 Digitisation with 5 samples per period
Figure 4.4 Sampling a 10 MHZz sin wave with a 20 MHz digitiser..
Figure 4.5 Sampling a 10 MHz sin wave with a 15 MHz digitiser.
Figure 4.6 Grey scale representation of the amplitude.
Figure 4.7 Appearance of a signal in a B-scan which occurs in a. succession of A-scans. 37
Figure 4.8 Principle of Signal Averaging.
Figure 4.9 Effect of Drive Pulse on Transmitter Crystal Element.
Figure 4.10 Illustration of Effect of altering Driver Pulse Width .
Figure 5.1 Illustration of meaning of Precision and Resolution.
Figure 5.2 Definition of Beam Spread...
Figure 5.3 Effective volume of coverage for two 60 degree probes aimed at 2/37.
Figure 5.4 Effective volume of coverage for two 45 and two 60 degree probes (5 MHz)
aimed at 2/3T. 49
Figure 5.5 Effective volume of coverage for two 60 and two 70 degree probes (5 MHz)
aimed near surface region. 50
Figure 5.6 Complete coverage of + and - 40 mm about weld centre with 3 scans (30 mm
apart) using two pairs of TOFD probes. 30
Figure 5.7 Arrangement for determining gait 54
Figure 5.8 Arrangement for double skip .. 59
Figure 6.1 Example of depth error asa function of depth due to timing uncertainty... 64
Figure 6.2 Example of depth error as a function of angle for a given timing uncertainty 65
Figure 6.3 General TOFD Layout 68
Figure 6.4 Illustration of Back Wall Blind Zon 69
ISSUE 1 FEB 2000 Vili
Figure 6.5 Illustration of where to measure lateral and back wall positions due to change
in PC
Figure 6.6 Ultrasonic path through couplant layer.
Figure 6.7 Illustration of variation in index point on surface of metal with defect positionS
7
Figure 6.8 Example of Overall Error as a function of Depth...
Figure 6.9 Shape of TOFD D-scan record due to flaw with profile parallel to surface
Figure 6.10 Measurement of beam spread ee oo)
Figure 6.11 Shape of TOFD D-scan record due to flaws with curved profiles 81
Figure 7.1 B-scan from Parallel scan showing characteristic pattern of mode converted
signals.
Figure 7.2 Appearance of Pores and Slag in D-sean..
Figure 7.3 Appearance of long Slag Lines.
Figure 7.4 Appearance of internal crack and thick slag line
Figure 7.5 Appearance of Top Surface Breaking Flaw
Figure 7.6 Profile of Rear Surface Breaking Defect ..
Figure 7.7 Appearance of signal from Defects near to or breaking lower surface
Figure 7.8 Change in Signal Strength due to change in Profile
Figure 7.9 Use of Parabolic Shaped Cursor to detect if Defect Profile is Curved
Figure 7.10 Definition of acceptance criteria for TOFD
Figure 8.1 Use of Parabolic Cursor for Determining Length.
Figure 8.2 Effective Beam Spread with SAFT
Figure 8.3 The SAFT Process ..
Figure 9.1 TOFD Probes on Convex Surface
Figure 9.2 TOFD Probes on Concave surface.
Figure 9.3 Complex Geometry access to one Surface only.
Figure 9.4 Complex Geometry access to two faces .
Figure A1.1 Ellipse - curve with constant time -of-flight..
Figure Al.2 Variation of factor f with off-axis distance X at
Figure A1.3 Variation of depth error with off-axis distance X at d=
s=2/3DTand.
Figure 1.4 Definition of X at lower beam angle.
Figure A1.5 Variation of factor f with depth at edge of beam for
Figure A1.6 Depth error at edge of beam for s = 2/3DTan6..
Figure A1.7 Variation of factor f with depth at edge of beam for
Figure A1.8 Depth error at edge of beam for s = DTan
Figure A1.9 Variation of factor. rf at edge of a single ‘V’ weld (included angle 609 for
2/3DTan(60)
Figure A1.10 Depth error at edge of a single ‘V’ weld (included angle 609 for
2/3DTan(60)
130
Figure Al. Variation of factor ‘fat edge of a double ‘V" weld (included angle 609 for s
130
= 2/3DTan(60) x
Figure A1.12 Depth error at edge of a double ‘V’ weld (included angle 60°9 for
2/3DTan(60)...
Figure A2.1 Two possible positions for flaw tip when tip offet from centre line 133
Figure AS.1 Example of the output from the calculation of the beam spread for a flat plate
in the TOFDAIDS package 145
ISSUE 1 FEB 2000 ix
Figure AS.2 Example of the calculation of the depth errors in a typical TOFD set up from
the TOFDAIDS package 146
ISSUE 1 FEB 2000 x
blank page
ISSUE 1 FEB 2000 xi
1, INTRODUCTION
1.1 Scope of the Course
‘The purpose of this course is to make the reader and student aware of the Time-of-Flight
Diffraction (TOFD) technique and its ability to perform flaw detection, location and
sizing, Although the course will be based around the digital ultrasonic data collection
system currently available a number of similar systems are available and have essentially
the same major features and facilities.
‘The course notes are intended to be used as background and reference material for both
Level | and Level II qualification standard. Where there is a clear distinction in the notes
this will be indicated by typing the specific Level I material in italics. Normal duration of
the Level 1 and Level II courses are 40 hours
Level | technicians should be capable of
i) setting up the TOFD equipment
ii) collecting TOFD inspection data
iii)recording and classifying the results according to written instructions
iv) reporting the results
Level II technicians should be capable of
i) setting up and calibrating the equipment
ii) performing and supervising the inspection
iii) interpreting and evaluating the results according to the applicable
standards
iv) define limitations of TOFD
¥) write practical testing instructions and procedures
vi) supervise and train Level 1 technicians
vii) organise and report the results of a TOFD inspection,
Considerable time is spent during the course on the practical collection and analysis of
TOFD data since experience in the viewing and analysis of TOFD data is very important.
Itis also very important to have in mind the different nature of TOFD as compared to the
‘more traditional Pulse-echo technique. The course will hopefully extend the participants
knowledge to be able to recognise the limitations of both techniques and to be able to
choose the appropriate technique or both for the intended inspection.
In addition to the current course notes the British TOFD Standard, BS 7706 and the
European (Pre) Standard, CEN/TC 138 WG 2 N 143, should be studied. The book by
Charlesworth, J. P. and Temple, J. A. G., “Engineering Applications of Ultrasonic Time-
of-Flight Diffraction”, published by Research Studies Press LTD, is also well worth
reading especially for Nuclear inspections and the inspection in particular of austenitic
components.
1.2 Requirements
It is assumed that a reasonable level of ultrasonic understanding has already been achieved
equivalent to at least an EN473 Ultrasonic Level 1 for the current Level | course and an
Chapter 1 Introduction. Page-- 1 -
EN473 Level II for the current Level II course. All candidates should have proof of a
satisfactory vision test.
1.3 Examination
‘An examination will be set at the end of the course which will consist of,
Level 1 written examination, 30 questions - 90 minutes
Level II written examination, 30 questions - 90 minutes
The object of the examination is to demonstrate that ultrasonic practitioners are capable of
understanding the TOFD technique and its limitations.
Chapter I Introduction, Page- -2-
2. BACKGROUND AND CONVENTIONAL ULTRASONIC
TESTING
2.1 Background to Non Destru
e Testing
Defects in welded structures may give rise to premature failure or unserviceability in
pressure vessels or piping systems. Thus welds need to be inspected and harmful defects
removed by grinding and or welding. The detection of cracks, particularly in welds,
before failure is thus very important since the consequences may be very serious. Flaws
which are crack-like may be actively growing, such as fatigue and stress corrosion cracks.
Other flaws may grow but often remain unchanged, e.g. welding and fabrication defects
such as lack-of-fusion, and the volumetric defects such as porosity and slag. The latter
type of flaws are more easily detected but are not so efficient as cracks in raising local
stresses and then growing to failure, There are various non-destructive techniques
available for testing metal components and they are generally divided into two classes of
detection, ie.
surface opening cracks by magnetic particle
dye penetrant
eddy current
magnetic techniques
ultrasonics
and internal cracks by radiography
ultrasonics.
‘Surface opening cracks are usually considered the most important since they are most
likely to grow and cause failure. However, they have the advantage that they can usually
be repaired more easily than internal cracks. Dye Penetrant and Magnetic Particle
inspections have no depth sizing capability and the magnetic techniques are also generally
used for detection only. ‘The Eddy Current technique has a sizing capability but,
depending on the material, only within a few millimetres of the surface. Ultrasonics has
both a detection and sizing capability.
Plant operators must satisfy the certifying authority that the plant is fit for service. This
process will include NDE, usually during the plant shutdown. Defects that are found from
the NDE may need to be repaired or the component replaced. Thus it is very important to
detect and size intemal cracks because repairs may prove very difficult and expensive and
if it can be proved that the crack size is below some critical level the plant may be safely
left running,
For most internal cracks there are only two inspection techniques available, radiography
and ultrasonics. Radiography is best suited to detecting volumetric type defects and planar
cracks may only be efficiently detected if the beam of X-rays is directed down the crack.
Also radiography needs access to both sides of the sample and has safety implications.
However, radiography is very widely used and is a very reliable technique for detecting
many types of weld errors and will detect changes in density equivalent to 1% of the wall
thickness. Radiography generates images which are widely accepted and understood, it so
gives a permanent record of the inspection which can be stored away for future reference.
Chapter 2 Background to ultrasonics page 3
However, the most reliable technique for detecting and sizing planar cracks is ultrasonics,
but its sensitivity may only be equivalent to 2% or 3% of wall thickness. Ultrasonics also
has the advantage that it only needs access to one side of the sample and there are no
safety implications.
2.2 Ultrasonic Non-Destructive Testing
Ifan electric potential is applied to a piezoelectric type material it oscillates and if it is of
the right thickness will produce waves of ultrasound of the frequencies most useful for
inspecting metal components. This material is the basis of ultrasonic probes which
produce longitudinal waves, generally called compression waves. Ifthe longitudinal
waves enter metal at an angle then they refract in the metal and produce both longitudinal
and shear waves, the angles of the two types of waves depending on the velocity of shear
and longitudinal waves in the metal and the velocity of the longitudinal waves in the probe
shoe material. Shear waves are transmitted by a periodic shear force and can only exist in
materials like metals which possess shear elasticity. Liquids cannot sustain a shear force.
For normal ultrasonic inspection of metals ultrasonic frequencies of between 2 and 5
MHz are used. The corresponding wavelength of the waves are found from the formula,
velocity (c) = wavelength (2) « frequency (f)
Velocity is usually defined in units of m/s and typical values in steel are 5950 m/s for
longitudinal waves and 3230 m/s for shear waves. Since the probe frequency is in units of
MHz (and we shall see that time is defined in microseconds in the TOFD technique) it is
more convenient to define the velocity units as mnvs (i.e. 5.95 mm/ts and 3.23 mm/s
respectively). In these units the wavelength in the above equation is given in millimetres.
‘Thus for the above frequencies the wavelength of longitudinal waves is in the range 1 to 3
mm and for shear waves from 0.6 tol.6 mm, For reflectors of size less than half a
wavelength interference can take place in the reflected waves and hence the minimum size
of cracks that can reliably be detected is equivalent to one half the wavelength, To detect
small cracks in thin materials higher frequencies are used but in thick material the
increasing attenuation with increase in frequency generally prevents the use of much
higher frequencies.
For conventional pulse-echo ultrasonic inspections angled shear waves are very important
since at a given frequency they have a wavelength half that of longitudinal waves,
allowing for the resolution of smaller defects. Also, as will be seen in a later chapter, for a
given size of crystal diameter and frequency shear waves produce a smaller beam spread
and a consequently higher beam intensity and more accurate sizing ability than
longitudinal waves.
2.3 Pulse-echo detection of flaws
An ultrasonic inspection of a sample is carried out by scanning the metal with a beam of
ultrasound. Any reflectors in the metal are only detected if the sound is reflected back
from the discontinuity and returns to the crystal element of the probe, where it vibrates the
crystal and is converted into electrical signals. In order to reflect the waves back the beam
must ideally be at right angles to the reflector surface. This is the so called “specular”
Chapter 2 Background to ultrasonics page 4
reflection. If the surface is tilted with respect to the direction of the beam of ultrasound
then the reflected waves may miss the probe crystal altogether and the discontinuity will
remain undetected. The proportion of the sound beam getting back to the crystal falls off
rapidly with increasing angles of tilt and skew from this ideal position. A tilt of only 5
degrees can cause the amplitude to fall by a factor of about 2 (6 dB) and 10 degrees or
‘more may result in loss of detection.
Thus for normal pulse-echo inspections with angled shear waves it is important 0 +
scan the metal with a range of probe angles chosen to give the best chance of detecting the
expected orientations of the cracks of main interest. In general a practical compromise has
to be made. Vertical cracks are difficult to detect because of the difficulty of getting an
ultrasonic beam at right angles to the crack surface and a pair of probes may be needed to
detect the cracks (tandem technique).
The decision to report the presence of a reflector in pulse-echo inspections is based
initially on the amplitude of the signal compared to some threshold level. This is a
relatively simple concept which works well practically. The threshold level is usually
determined from the amplitude of the signal reflected back from a standard reflector in a
calibration block. However, since the roughness of the reflector surface, as well as its
orientation, directly effect the amplitude of the retumed signal an awareness of the likely
probability of detection is very important. Ultrasonic inspection is not perfect and the skill
and experience of the operator is very important, hence the need for training.
2.4 Flaw Sizing with the Pulse-echo Technique
The method of flaw sizing used in the pulse-echo technique depends on the size of the flaw
with respect to the beam spread of the probe (see figure 2.1).
Probe
Flaw
‘beam spread \
Figure 2.1 Flaw size in relation to beam spread,
The basic assumption in determining the size of flaws that are smaller than the beam
spread is that the amplitude of the reflected signal will be proportional to the area of the
flaw in the beam of ultrasound. In this situation the estimate of size is based on the
relative size of the amplitude with respect to that obtained from a standard reflector at a
similar range. Standard reflectors are provided in various calibration blocks and consist
Chapter 2 Background to ultrasonics page 5
of flat bottomed holes, side drilled holes or notches. Thus the accuracy very much
depends on the degree of roughness of the flaw surface and its exact orientation with
respect to the ultrasonic beam.
For flaw sizes larger than the beam spread increasing the size of the flaw will have no
effect on the amplitude of the signal since the area outside the beam will not contribute to
the reflected signal. The flaw size has to be obtained therefore by scanning the probe over
the flaw and noting the position where a certain change in amplitude takes place. This is
illustrated in figure 2.2 for an angled shear wave probe sizing a lack of fusion
successive probe positions
\ a
acnplitade Jo . 64B
t x half peak height
probe movement x
«
position of probe. —>
») Plot of maximum observed amplitude as function of position
Figure 2.2 Determination of Flaw Size by 6dB Drop Sizing
flaw. When the probe is moved towards the weld the flaw starts to appear in the
ultrasonic beam and the amplitude of the flaw signal rises. Once the flaw area fills the
beam the amplitude stays constant until the beam starts to pass the other end of the flaw ,
when the amplitude starts to fall. It is assumed for this explanation that a Distance
Amplitude Correction has been applied so that there is no variation of amplitude with
range. The maximum amplitude trace across the flaw is called an echodynamic trace and
is shown in the bottom half of figure 2.2.
At the level where the signal amplitude is half that of the maximum signal it is assumed
that only half the flaw area is in the beam of ultrasound and that the centre of the probe is
opposite the edge of the flaw. Thus if the positions of the probe are noted where the
amplitude has dropped by 6 dB the size of the flaw can be measured and hence the term 6
4B drop sizing. If the distance between the probe positions is x mm then the width, w, of
the flaw is given by w = xcos(6), where Bis the angle of the beam centre with respect to
Chapter 2 Background to ultrasonics page 6
the normal to the surface of the metal on which the probe sits. The through wall height of
the flaw (the critical measurement), h, is then
h = xcos(@sin(Q).
To determine the length of the flaw along the weld the probe must be positioned so as to
obtain the maximum amplitude signal and then moved parallel to the weld to determine
the 6 dB drop positions. The length is the distance between these positions.
Again the main problem with the 6 dB drop technique is the variation in amplitude due to
the possible roughness of scattering surface and the fact that the flaw surface is unlikely
to be normal to the ultrasonic beam.
Some typical smallest sizes of flaws which can be detected and typical sizing errors are
listed below from document IIS/IIW - 580 - 86 from Commission V of the International
Institute of Welding for pulse-echo ultrasonics.
Defect positions | Through-thickness Length
‘Smallest | Accuracy, | Smallest | Accuracy,
size, mm__| + or-mm | length, mm | + or - mm
Near surface, e EB 4 5
0-5 mm depth
‘Mid-wall, mm
5-25 3 3 4 4
25-75 2 3 7
75-125 5 5 10 10
Back surface wall
thickness, mm
10-25 4 4 4 4
25-75 4 4 7 7
75-125 5 * 10 10
2.5 Comparison of Flaw Sizing Accuracy for different
Techniques
Other techniques are available for sizing flaws. For surface opening flaws, if'access is
available to the surface the alternating current potential drop (ACPD) is an accurate
technique. The technique essentially measures the drop in voltage between two surface
contacts when placed on either side of the flaw, the additional voltage drop being due to
current having to flow around the flaw surface. Specialised eddy current type techniques
(ACFM) can also measure the size of near surface flaws. One of the most accurate and
usefill techniques for measuring flaw height is the TOFD technique which is the subject of
this course. The importance of the TOFD technique is seen from the comparison of the
accuracy of different crack sizing techniques summarised below,
Chapter 2 Background to ultrasonics page 7
Chapter 2 Background to ultrasonics page 8
Blank page
Chapter 2 Background to ultrasonics page 9
3. THE TIME-OF-FLIGHT DIFFRACTION TECHNIQUE
3.1 Background to the Importance of the TOFD Technique
The most serious types of defects in welds and metal components are planar cracks since
they are the most likely to grow and cause failure of the component and hence the
importance of ultrasonic inspection since ultrasonics is the most suitable technique for
determining the position and sizing such defects. The importance of developing more
accurate sizing techniques than afforded by conventional pulse-echo inspections became
apparent in the 1960's, especially in the nuclear and chemical plant industries. When
defects where found in these plants repair of the damaged components was often very
difficult or impossible, one of the problems being the difficulty of carrying out the
necessary heat treatment after welding. In the nuclear industry there was also the problem
of access and often high radiation levels. To shut down and replace such plant is a very
expensive exercise.
‘Thus the science of Fracture Mechanics developed to enable the growth rate of defects to
be predicted and to calculate the critical size of defect below which it was possible to
carry on safely running the plant Often, because of the difficulties in determining all the
properties necessary for the calculations (e.g. fracture toughness) very conservative
estimates had to be made and the consequent lifetime predictions for the safe operation of
the plant became very short.
If it could be proved by successive ultrasonic examinations of the defects that they are not
growing or they are growing at a much slower rate than predicted then this would be very
important to the plant operator. If the defects are stable and below the critical size then the
plant can stay in operation. If they are growing at a slower rate then the lifetime of the
plant can be extended. Also if the growth rate can be accurately measured then suitable
plans can be drawn for a programmed repair or replacement of the plant, again saving the
plant operator a lot of expense. Unexpected shutdowns with the consequent loss of output
and the need for unplanned repairs are the plant operators nightmare.
The need, in order to measure the growth rate of cracks, is accurate through wall sizing,
The inadequacy of conventional pulse-echo techniques is illustrated in figure 3.1. The
two plots show the predicted lifetime curve for a particular defect and it is predicted to
reach the critical size after about 1.5 years. In the top illustration is shown the results of
pulse-echo measurements of the crack height at the yearly plant shutdowns. Because of
the large error on the measurements indicated by the error bar the measurements can not
influence the conservative predicted lifetime, The bottom plot illustrates the results of
measurements with TOFD. Since the errors are now much smaller it is apparent that the
actual growth is less than the predicted growth and the actual plant lifetime can be
extended.
The ability to size flaws more accurately should also help to limit the number of false
calls. If the requirement is that a very high probability of detection is required for flaws
above a certain size then the threshold for pulse-echo detection has to be set considerably
lower than this size because of the large error with the pulse-echo technique. This means
that a considerable number of flaws, which are actually below this size, are reported as
being above this size because they appear with the pulse-echo technique to be larger.
Thus while a very high probability of detection may be obtained for flaws above the size
Chapter 3 TOFD technique page- 9 —
of interest there will be a large false call rate. This is made worse by the fact that the
distribution curve of flaw size against number of flaws usually rises towards the smaller
sizes.
Thus in principle the detection threshold for the more accurate TOFD technique can be
set much closer to the size of interest and thus greatly reduce the false call rate,
3.2 History of TOFD Development i
ee critical
predicted size
lifetime
height of | growth
crack | “uve Ap
TR putee-eche
1 pore.
5 2
VA eritcal
sue
predicted lifetime growth curve
height of av
crack k ake
TOFD
time, years 1
1 2 3
time, years ——»
re 3.1 Illustration of importance of accurate sizing measurements
In the last section the importance of accurate sizing of cracks was described, especially in
the Nuclear Industry. For this reason the National NDT Centre at Harwell (then part of the
United Kingdom Atomic Energy Authority - UKAEA) asked Dr Maurice Silk to try and
develop an ultrasonic sizing technique more accurate than the conventional pulse-echo
method. In the early 1970’s Dr Silk developed the technique known as Time-of-Flight
Diffraction (TOFD).
Chapter 3 TOFD technique page- 10—
For a number of years TOFD remained largely a laboratory tool, but the realisation of its
importance and the proposed Public enquiry for a PWR Reactor in the UK lead to a
number of major trials in the early 1980s to evaluate the best possible ultrasonic
inspection technique for the reactor pressure vessel and other major components. These
trials were known as the Defect Detection Trials (DDT). The trials were very important in
view of the international PISC exercise in the late 1970"s, which was aimed at
establishing the capability of the ASME Code ultrasonic procedures, and which obtained
poor results for the reliability and accuracy of conventional pulse-echo inspection. As will
be mentioned later (see Chapter 13), TOFD proved to be a very capable and accurate
technique. Many other trials and validations have been carried out comparing different
techniques and in all these tests TOFD has always proved to be virtually the most reliable
and accurate technique.
Because the digital systems available up to 1982 were relatively large it was difficult to
carry out inspections in the field. Thus the National NDT Centre developed a more
portable system for collecting and analysing the data. The system was known as.
ZIPSCAN and was licensed by SGS Sonomatic in 1983 and sold throughout the world.
Sonomatic is now part of AEA Technology. Nowadays there are a number of commercial
digital ultrasonic systems available for carrying out TOFD inspections.
Initially TOFD was only developed and used as a sizing tool. It was expected that flaws
would be detected by the conventional techniques and then TOFD used for more accurate
sizing. A particular application was in the monitoring the crack growth of cracks detected
in major plant components, e.g. pressure vessels.
However, has TOFD became more accepted and used during the later half of the 1980°s,
especially by the oil and gas industry both offshore and onshore, its economic advantages
for detection as well sizing became apparent and these days TOFD is used in many
applications for both detection and sizing. Very often one scan with a pair of TOFD
probes along a weld will reveal all the defects in the weld volume. The ability to collect
an image of the inspection data (B- or D-scans) also affords advantages in difficult
‘geometrical situations or for weld roots since it is often easier to recognise new patterns in
an image than to characterise signals in a single A-scan. A good example of this is major
use of TOFD in the offshore oil industry for detecting weld root erosion.
The TOFD technique has continued to be developed by the major research establishments
(e.g. modelling applications for helping with the analysis of the data and optimising the
collection of the data in complex geometry) and by the inspection companies for different
applications.
Chapter 3 TOFD technique page- 11 —
3.3.1 Diffraction process
When an ultrasonic wave interacts with a long crack-like flaw it results in the production
of diffracted waves from the crack tips, in addition to any ultrasonic waves reflected from
the surface of the crack. The diffracted waves are much weaker than specularly reflected
waves used for conventional ultrasonic inspection, but they radiate from the tips in all a
directions along the same plane as the incident ultrasonic waves as indicated in figure 3.2.
The phenomena of diffraction is nothing new and occurs with all types of waves, e.g. light
and water waves. It is very well known in light especially when light is passed through a
slit or past an edge and contributes to the resolving power of telescopes and other optical
instruments. To explain diffraction when waves pass through a slot
Probe
Incident
bearn
Reflected
waves
Crack, Diffracted waves
Figure 3.2 Representation of the Diffraction Process from Crack Tips
Huygens’ proposed, three centuries ago, that “each point on a wave front may be
regarded as a new source of waves". Hence, for illustration purposes, we can think of
reflection of a wave from a surface occurring as outlined in figure 3.3. Each point on the
Chapter 3 TOFD technique page- 12 —
Incident plane wave
Figure 3.3 Illustration of Diffraction
surface (on a scale smaller than the wavelength) acts as a reflection point and produces
waves. Then as the separate waves cross each other interference takes place and as
explained by Young in 1802 for light “the resultant displacement is the sum of the
displacements due to each separate wave” and in this case the result is a reflected plane
wave. However, at the edge of the surface the waves from the tip are left and produce so
called diffraction waves. Nowadays diffraction is more accurately described by
Kirchhoff’s theory.
The phenomena of tip diffraction is just another technique in the repertoire of general
ultrasonics. The use of tip diffraction signals as long been used in pulse-echo sizing
estimations since it often enhances the signal when the probe is opposite the end of the
defect and used in this way it is sometimes called the maximum amplitude technique or
backward scatter tip diffraction.
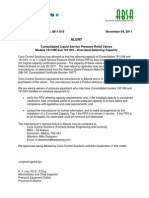
4.3.2 Angular Variation of Diffraction Signals
The angulat variation of the amplitude of the diffracted waves with is illustrated in Figure
3.4, The figure is not an exact
Chapter 3 TOFD technique page- 13 —
transmnitter receiver
%
angle
ee Crack i
0
{- signal from bottom
nell of crack
Relative
Panel 6 signal fom top
B
of crack
alk
°
=14) 33 Boro
L L 1 710 lboe
2040 60 80
theta degrees SS° Rear pute
Figure 3.4 Calculated Variation of Amplitude of Diffracted Waves with Angle
reproduction and the reader should refer to Charlesworth and Temple (1989) for an exact
variation. The variation of the top and bottom signals from a vertical crack located mid-
way benween two TOFD transducers is shown as a function of of the beam angle with
respect to the normal. The amplitude has a maximum at around 65 degrees in steel, and
has a slightly greater amplitude from the bottom of the crack than the top, but the
amplitudes on the whole are very similar. Between about 45 and 80 degrees the variation
in amplitude is less than 6 dB. For the bottom of the crack there is a large reduction in
amplitude at about 38 degrees with the amplitude rising again around 20 degrees,
Typical angles in an inspection are 45, 60 and 70 degrees.
For shear waves the optimum angles in steel are about 45 degrees for the top and 57
degrees for the bottom of a vertical crack.
For defects which do not lie in a plane perpendicular to the line joining the two
transducers the calculation is more complex and is described by Charlesworth and
Temple (1989), but relatively large angles of skew have litle effect on the amplitude.
3.3.3 Basic TOFD Set-up
3.3.3.1 Probe type and wave type
Chapter 3 TOFD technique page- 14 —
‘The TOFD technique is a crack sizing technique based on locating the crack tips from the
ultrasonic energy re-emitted by diffraction. The basic arrangement of the TOFD
technique consists of two probes in the pitch-and-catch configuration, with one probe
acting as the transmitter and the second probe the receiver, Such an arrangement provides
a large volume for inspection and provides for unambiguous location of the position and
depth of the reflectors.
Cable connector
Compression probe
‘Couplant squeezed
between probe
and shoe
Shoe (perspex or similar)
shoe holder
‘Angle chosen to give desired beam angle in metal
Figure 3.5 Cross Section of Typical Probe
A single probe could be used for the inspection but is not recommended, since it reduces
the location accuracy of the flaw tips. We shall see that a transverse (parallel) scan with a
pair of probes gives the accurate location of the flaw tip.
A typical probe is shown in Figure 3.5 and consists of a compression transducer mounted
on a wedge of perspex or similar material. The compression probe should be chosen to
have a short pulse length in order to give good depth resolution. The wedge angle is cut to
give compression waves in the metal at typical angles of 45, 60 or 70 degrees. The
transducers often have screw threads so that they are easily interchangeable with the
wedges. Couplant must be present between the transducer and wedge in order for
ultrasound to be transmitted. This design has the drawback that the couplant eventually
dries out and must be replaced.
‘The reason for using compression waves in the metal is that they travel at about twice the
velocity of shear waves and hence arrive first at the receiver. In order to work out depth a
knowledge of the velocity is required and it is much easier to unambiguously to work out
depth if one can assume that the signals have a compression velocity. When either type of
wave is reflected or refracted it can partially mode convert into the other type of wave.
‘Thus if shear waves were used and they diffracted from a defect tip compression waves
might also be produced and these would then arrive at the receiver first, If in this case it
‘was assumed that the shear velocity was the correct velocity the depth would be calculated
incorrectly.
Chapter 3 TOFD technique page- 15~
‘fier the compression or longitudinal wave has travelled through the shoe, however, it
splits up into the desired compression wave at the required angle and into a shear wave in
the metal at approximately half the angle of the compression wave. Thus shear waves are
present in the metal but the resultant signals generally occur after the compression signals.
Thus the resultant TOFD inspection data can contain waves that have travelled,
all the way as compression
all the way as shear i
part of the path as compression and part shear
3.3.3.2 Signals observed
28
Transmitter Receiver
D
Reflection from backwall
Figure 3.6 Wave Paths for the TOFD Arrangement
‘The TOFD arrangement is shown in Figure 3.6. The A-scan appearance with no defect
present is shown in Figure 3.7 and with a defect present in Figure 3.8. The main types of
waves seen are as follows.
ateral wave
In general a weak lateral wave running between the two probes with the compression
velocity just below the surface of the metal is observed first. It obeys Fermat's principle in
that a wave travelling between two points takes the minimum time. As we shall see later,
for a curved surface it will travel straight across the metal between the two probes. On
material with a surface cladding layer the velocity of sound in the cladding may be such
that the lateral wave travels most of the way in the material beneath the cladding. The
lateral wave is not a true surface wave but a bulk wave generated at the edge of the beam.
The frequency content of the lateral wave tends to be lower than the waves from the centre
of the beam (the beam spread is frequency related and the lower frequency component
has therefor a wider beam spread). For a true surface wave the amplitude would decay
exponentially with distance from the inspection surface.
The lateral wave can be very weak for large probe separations and may not even be
recognisable.
Chapter 3 TOFD technique page- 16 —
Because of the basic pitch-catch probe arrangement the signals from the near surface
region are very compressed in time and these signals may be hidden beneath the lateral
wave.
Back wall signal
A much larger signal reflected/diffracted from the back wall is observed after the lateral
wave because of the greater distance travelled. If the probe beams are only directed at the
upper part of the metal or there is no suitable back wall there may be no back wall signal.
Defect signals
Ifa planar type crack is present in the metal in the overlapping beam of the two probes
diffraction signals from the top and bottom tips are seen between the lateral wave and the
back wall. These signals are generally much weaker than the backwall signal but stronger
than the lateral wave. If the defect has little height then the signals from the top and
bottom may run into each other. Thus the importance of a minimum number of cycles in
the signals in order to improve the resolution of the signals from the top and bottom of
small defects.
Because the diffraction signals are so weak they cannot always be easily seen on a single
‘A-scan and it is only by displaying the successive A-scans from a scan in B-scan form that
the pattern of the diffraction signals becomes clear. Signal averaging is very important in
these situations because it improves the signal-to-noise ratio.
Again this is why TOFD is very difficult with an analogue flaw detector where only a
single A-scan display is available.
Shear or mode converted shear signals
After the compression back wall signal a much large signal generally appears and is a
back wall shear reflected signal and it is often mistaken for the compression back wall
signal. Between these signals other signals are generally observed due to mode conversion
at a defect into shear waves which then takes a longer time for the signal to arrive at the
receiver.
Itis often very useful to collect signals in this region since genuine defect signals are
repeated at longer times and near surface defect signals may be clearer since they are
spread out in time more for the shear waves.
Ray Paths
The ray paths depicted in Figure 3.6 are simply those that happen to connect the probes
and crack tips. They do not represent special angles at which diffraction only occurs.
Diffraction can occur at all angles and those rays in the beam spread which happen to hit
the tips will be diffracted and hit the receiver.
3.3.3.3 Phase Relationships
‘An A-scan is reproduced in Figure 3.7 and contains the lateral wave and back wall signals.
When a wave in a medium with a higher acoustic impedance is reflected at the interface to
a lower acoustic impedance there is a phase change of 180 degrees (c. g, steel to water or
steel to air) This means that if the waveform starts with a positive cycle before it hits the
wall it will start with a negative cycle after reflection from the wall.
Chapter 3 TOFD technique page- 17—
‘Transmitter Receiver
Lateral wave
Backwall
Lateral wave echo
Acscan representation
Figure 3.7 A-scan with no Defect Present
When a defect is present the situation shown in figure 3.8 occurs. The signal from the top
of the defect acts as if it had undergone a reflection from a backwall and has a phase
change of 180 degrees, i.e. the phase is like a backwall and starts with a negative cycle.
The bottom of a defect, however, acts as if the wave runs round the bottom without a
phase change and the phase of the signal is like the lateral wave, i.e. it starts with a
positive cycle. Theory shows that if two diffraction signals have opposite phase they must
have a continuous crack between them. Theory also shows that in a few cases the top and
bottom diffraction signals may not have a phase change of 180 degrees, but in general they
will. Thus the recognition of phase change is very important for characterising signals
and for making the most accurate defect sizing. For example two signals may be present
which are from two slag lines rather than a single crack. In this case there will not be a
phase change. Slag lines and pores are generally to thin to produce separate top and
bottom signals.
Because the number of observed cycles in a signal very much depends on the amplitude of
the signals it is often difficult to recognise the phase. This is especially true for the
backwall which is generally saturated. In these situations it is important to sit the probes.
on the sample being examined or a calibration block and tum the gain down so that the
backwall or any other difficult signal has the same screen height as the defect signals and
then increase the gain making a note of how the signal grows with respect to the order of
the phases. It is sometimes easiest to concentrate on the two or three most predominant
cycles,
Chapter 3 TOFD technique page- 18 —
It is because the phase information is important that it is necessary to collect the TOFD
unrectified signals digitally.
Transmitter Receiver
Diffracted waves
metal
Crack
Backwall echo
tip diffraction Backwall
Lateral wave from top of Pee ee echo
bottom of erack
De
‘Acscan representation ay
Pllase,
Figure 3.8 A-scan with Defect Present
3.3.3.4 Depth Calculation
The depth of a reflector is calculated from the arrival time of the pulse by simple
trigonometry. There is no recourse to measurement of amplitude. The positioning of the
tip signals then provides information on the actual flaw sizes and height estimates below
the scanned surface and through wall size.
For a reflector situated symmetrically beneath the probes, as shown in Figure 3.9 the
distance travelled in millimetres between the probes is,
distance = 2(s? + d?)'?
where s = half the probe centre separation (PCS) 2s, mm
d= depth of reflector, mm
()!? means square root of the number in the brackets.
Hence the time, t, taken in microseconds is
t=268? + d*)4/e
where ¢= velocity of sound in units of mm/s.
Chapter 3 TOFD technique page- 19
surface
a backwall
Figure 3.9 Basic TOFD parameters
‘Thus by rearrangement of the above equation the depth can be expressed as a function of
the measured time,
d= [(ct/2)? - s?]!?
Assumption - the above is the formula used to calculate depth for an observed signal and
it always assumes that the flaw tip is symmetrically located between the two probes.
Very often the reflector will not be symmetrically positioned beneath the probes and there
will be an error in the calculation of depth (for non-parallel scans along the weld). This is
cussed in more detail in the Chapter on Errors and Appendix 1, and a method is
described in Appendix 2 for improving the determination of depth for a non-parallel scan
utilising the additional information in the mode converted diffraction signal. In most
situations, however, with a single “V” weld the additional depth error due to the off-axis
location is small. Also when determining flaw height from top and bottom tip diffraction’
the off-axis error will tend to cancel. The off-axis error does not apply in the case of
parallel scans across the weld.
The typical size of the error for depth measurements is + or - 1 mm (see Chapter on
Errors), but when used in repeat inspections for crack growth monitoring using the same
probe array and equipment the error is reduced to typically + or - 0.3 mm.
Because of the pitch-catch probe arrangement the relationship between depth and time is
not linear and has can be seen from the above equation it has a quadratic form. Software
should be available to convert the collected B- or D-scan into a linear depth scale by a
process known as linearisation. This then provides a B- or D-scan linear with depth and
this may be more usefill to plot for a report. Very often when analysing the data it is
preferable to work from the raw collected data with the data plotted on the time axis,
Because the paths to reflectors near to the surface are almost horizontal a small change in
time represents a large change in depth. Thus, conversion to a linear depth scale tends to
spread out the near surface signals and the lateral wave appears out of proportion. An
alternative method for depth measurements is to use a cursor on the raw data and read out
depth at the position of the cursor.
Chapter 3 TOFD technique page- 20—
The other effect of this non-linear depth scale, has will be shown in the Chapter on Errors,
is that the error on the depth measurement increases rapidly near the top surface. Thus
because of the presence of the lateral wave and the increasing depth error TOFD is
not so useful for inspecting the near surface region for internal flaws, typically the
first 10 mm when only one scan is used. However, by reducing the PCS and maybe
using a higher frequency then more of the near surface region can be directly inspected,
but with some reduction in the volume of coverage. For example, by using higher
frequency probes ( ~ 15 MHz) and a small PCS, thin samples can be inspected to within a
millimetre or so of the surface.
3.3.3.5 Measurement of Time and initial Probe-Centre-Separation
Depth Calibration
In practise the depth calculation needs to take into account the extra delay in the measured
time due to the passage of the sound through the probe shoes. This delay is known as the
probe delay2t, microseconds. Thus the total transit time measured, t, is in practise given
by
t=2(s? + d’)'7/e + 2t,
and the depth is given by
= [(c/2)°(t-2t,)* - s?]'7
Thus it would appear that to pol the depth for a reflector with a transit time of t us
that a knowledge of the ultrasonic velocity, probe delay and probe centre separ:
required. However, it will be shown in the Chapter on Errors that a more accurate
calculation of the depth can be made if the velocity and probe delay are found from the
measurement of the positions of the lateral wave and back wall signals. This procedure
helps to reduce any systematic errors such as errors in the PCS.
The lateral wave signal occurs at a time, t; 1s, and is given by
t)=2s/e + 2t,
and the back wall at a time, t, ts, and is given by
t, = 2(s? + D?)!/e + 2t,
where D thickness of the sample.
By rearranging the two equation the probe delay and velocity can be found if the PCS =
2s, and the thickness D is known, i.e.
= 2(s? + D?)'” - 2s
(ty - t)
ty - (8? + D?)'7/e
and 2
Thus the recommended method of measuring depth is to measure the PCS and the
thickness of the sample and enter the values into the file header before starting a scan,
Then to measure a depth in a B- or D-scan, if the relevant software is available, first
measure the position of the lateral and back wall signals and let the computer
automatically calculate the probe delay and velocity. Then at each cursor position in the
image the depth can be calculated. Obviously if there is no lateral or back wall signal then
Chapter 3 TOFD technique page- 21 —
only one signal can be used for calibration and either the velocity or probe delay must also
be input to the program.
‘The PCS is measured between the index points of the two probes.
Measurement of time of arrival of various signal
Because of the phase changes in the various signals care must be taken in when choosing
the position for measuring the time of arrival of the various signals in order to obtain the be
‘most accurate depth estimates. The prime requirement is to be consistent in the various
‘measurements. One could choose to measure to the peak signal, but since the back wall
signal is often saturated this is more difficult. One suggestion is to measure the time at a
crossover point when the cycle changes from positive to negative. This is quite easy if
there is a readout of time and amplitude as a cursor is moved about the B- or D-scan, since
the reading should change at the cross over point from negative to positive or vice versa.
The sample nearest point nearest to an amplitude of zero should be chosen.
A possible set of positions are shown in Figure 3.10. If the lateral wave starts with say a
positive cycle take the reading at the start of the cycle. The equivalent time at the back
wall signal will then be, because of the phase change, the start of the first negative cycle.
However, in the example shown the start of the second negative cycle has been chosen
because the amplitude is much greater and there are more eycles. The second negative
cycle is deemed in this case to be the equivalent cycle to that used for the lateral wave.
For the tip diffraction signals the start of the first negative signal is chosen for the top of
the crack and the first positive signal for the bottom of the crack.
hh he
Lateral wave Buceet
top of crack bottom of crack,
Figure 3.10 Consistent measurement of time of various signals
Initial choice of PCS for an Inspection
Chapter 3 TOFD technique page- 22 —
For a new inspection the best choice of PCS for a single non-parallel scan is such that the
ultrasonic beam centres are aimed at two thirds of the depth of the sample. This will then
in general give coverage of the majority of the weld. If the beam centre angle in the metal
is 0, then in general
tan@ =s/depth
and at two thirds the depth the PCS, 2s = (4/3)Dtan0
where D is the thickness of the sample. It will be shown will be seen in a later Chapter
that when aiming at a specific depth, d, e.g, for a parallel scan that the PCS is given by,
2s = 2dtanO
Check collecting correct part of A-scan
‘Since the lateral wave is often very weak and there is a very strong shear wave back wall
signal beyond the compression back wall signal it is easy to take the later for the lateral
wave and the shear wave signal for the back wall signal. Always check that the observed
signals correspond to the calculated times of arrival of the lateral wave and back wall
signal, i.e.
lateral wave t; = 2s/e + 2t,
and back wall ty = 2(s? + D*)!7/e + 2t,
3.3.3.6 Pattems for Surface breaking Defects
For surface breaking cracks the expected TOFD B- or D-scan will be modified. Thus if the
defect breaks the upper surface the lateral wave will normally be eliminated ( as shown in
Figure 3.11) or very much reduced in amplitude. If the defect is not very long then the
lateral wave may partially get round the side of the defect.
lateral wave
surface Spening crack
es backwall echo
non-parallel scan
Figure 3.11 Surface opening crack in a non-parallel scan
For cracks open to the back wall the resultant D-scan is shown in Figure 3.12. The effect
on the back wall depends on the height of the crack and the volume of coverage of the
probe set up.
For cracks with small penetration into the metal the diffraction signal should be seen just.
above the back wall with normally no change in the appearance of the back wall signal
This is because the majority of the ultrasonic beam still gets past the crack. If the crack
penetrates in somewhat further the back wall signal may lose some amplitude and have a
dip due to the longer path for sound at the edge of the beam still being reflected from the
Chapter 3 TOFD technique page- 23 —
back wall and getting to the receiver. Finally, if the crack penetrates sufficiently far the
back wall signal will be cut off.
During scanning it very easy to lose good contact with the surface and hence lose the
ignal
ss of the lateral wave but
with the backwall still present indicates a surface opening crack and similarly loss of back
wall but with lateral wave still present indicates a rear surface opening crack
back wall
lateral wave
Stall defect
defect open toback wall
backwall echo
lateral wave
Medium height defect
seg
SS ES backwal echo
lateral wave
High defect a =
Figure
12 Surface opening cracks on the back wall for a non-parallel scan
3.4 Types of TOFD Scan
Chapter 3 TOFD technique page- 24 —
There are two types of scan. The initial scan generally used for detection is shown in
Figure 3.13 and is called the non-parallel or longitudinal scan because the direction of
scan is at right angles to the direction of the ultrasonic beam. ‘The resultant scan is known
as a D-scan since it produces a cross section along the weld, This type of scan is usually
set up with as wide a beam spread as possible to inspect as large a volume as possible with
‘one scan. Since the probes straddle the weld the weld cap does not interfere with the scan.
It is a very economical inspection and is the scan most frequently carried out and often the
only one.
‘The second type of scan is shown in Figure 3.14 and is called the transverse or parallel
scan. The direction of scan is parallel to the ultrasonic beam direction. The scan produced
is called a B-scan since it produces a cross section across the weld. In this case if there is
a wide weld cap it is difficult to carry out the scan and only a limited movement may be
possible. This type of scan gives the most accurate measurement of depth and should be
optimised for this purpose.
Scan
direction
Figure 3.13 Non-Parallel or Longitudinal Scan
‘Scan direction
—.
‘Transmitter Receiver
beam direction
Pranic re stente: Semee Beran
Chapter 3 TOFD technique page- 25 —
The importance of the parallel scan is illustrated in Figure 3.15. In the figure a lack-of-
fusion defect with constant height and length in the plane of the weld is assumed. The
non-parallel scan will give a parallel set of diffraction signal extending over the length of
the defect with characteristic shaped ares at the ends where the path length is longer as the
probes approach and leave the defect. However, there is no knowledge to be gained from
the D-scan of the location of the reflectors in the cross sectional plane across the weld.
The defects could be from any position in the beam coverage of the probes. This is
illustrated in Figure 3.16.
lack-of fusion defect
‘with length along weld
cross section across weld ete
Cutan Bue TO APPeemely Aue oo DeKer
ater wave
Figure 3.14 Parallel or Transverse Scan
backwall echo
|
D-scan from non-parallel scan
B-scan from parallel scan
‘igure 3.15 Difference between a non-parallel and a parallel scan
ii ed eS. |e
Tl
me NX beam speéad
region over which signal observed
t
ellipse with constant time-of-flight T1 +12
Chapter 3 TOFD technique page- 26 —
Figure 3.16 Uncertainty in lateral position in a non-parallel scan
In Figure 3.16 a signal with a certain transit time could be anywhere on the locus of an
ellipse with the two probe positions as the focal points This means that the reflectors may
not be symmetrically situated beneath the probes and hence the depth calculation will not
be
the most accurate. The error is in general very small because due to the limitations of
beam spread the variation in depth is over the almost horizontal part of the ellipse.
With the parallel scan, provided a complete scan is obtained, the probes traverse over the
defect and at some point the reflectors are symmetrically positioned beneath the probes,
thus giving the most accurate depth. This is shown in the figure by the characteristic ares
produced by this type of scan. As the probes approach the reflectors the signal starts and
rises as the path length shortens until the minimum is reached when the reflector is
symmetrically beneath the two probes. The peak position corresponds to this minimum
time.
This peak position also gives the location of the reflector in the weld cross section and the
relative position of a crack top and bottom signal gives an indication of the crack
orientation. If the scan is carried out with an encoder and the start position is known with
respect to the weld centre line, then it should be possible to locate the position in the weld
cross section to within one or two millimetres. This is very important since the location of
the defect will help to provide a clue for the characterisation of the defect. To obtain good
results, however it may be necessary to use a smaller PCS and narrower beam width in
order to obtain a sharp peak.
In many instances, because of the need to complete the inspection quickly or because of
financial constraints, inspections are only carried with the non-parallel scan. However, in
order to make a reasonable guess as to the type of defect and to get the best sizing
accuracy parallel scans should be carried out over all the signals of interest found in the
non-parallel scans. If the defect is long then parallel scans should be carried out at
different positions along its length.
3.5 Main Uses Of TOFD
The main uses of the TOFD technique are,
a) for accurate flaw sizing, TOFD is one of the most accurate techniques
especially for internal defects.
b) For screening and sizing. Since TOFD can detect all the flaws in the beam
coverage irrespective of orientation it has a high probability of detection . The
fact that inspection data is collected in B- or D-scan form also improves the
detection of cracks in the presence of signals from geometric features such as
mismatch and weld defects such as excess penetration or undercut. Most welds
can be rapidly screened by TOFD and demonstrated that they are free of
significant flaws.
©) Change monitoring. TOFD is one of the most accurate methods available for
measuring the growth of flaws.
‘The development of acceptance codes for TOFD has been slow. However, with the
development of Inspection Standards (British and European) acceptance codes have been
proposed. An example of an acceptance code is given in Chapter 7,
Chapter 3 TOFD technique page- 27 -
3.6 Summary of Advantages and Disadvantages of TOFD
‘TOFD is a most powerful technique, not only for accurate depth sizing of defects but also
for detection in routine inspections. However, its lack of adequate acceptance criteria still
prohibits its use in some inspections. Various evaluation projects have demonstrated that
the technique combines a high probability of detection (POD) with a low false call rate Be
(ECR). In addition the simplicity of its scanning concept enables application on many
different components, including complex geometry.
Procedures and criteria for the acceptance/ rejection of weld defects are essential for NDT
and hence the importance of codes and standards for industry. Any new technique presents
problems of initial acceptance since acceptance criteria often tend to be based on “known
practise” (c.g. radiography). ‘Thus it is very important to develop criteria for TOFD
which are compatible with its unique ability, i.e. mapping the the position of the edges of
defects.
Like any other technique TOFD has its limitations (see below for advantages and
disadvantages). In general the technique is less suited to coarse grained materials and
inspection reliability close the scanning surface is hampered by the presence of the lateral
wave.
Advantages
The two most important differences of TOFD from conventional pulse-echo are,
i) the almost independence of angle of the defect for detection of the diffraction
signals
ii) the depth sizing is not dependent on the amplitude of the signals and the
corresponding errors
‘Thus the main advantages of TOFD are,
a) TOFD has a through wall sizing accuracy of + or - 1 mm and a crack growth
monitoring capability of + or- 0.3 mm
b) efficient detection of defects of all orientations
©) permanent digital record of the inspection data with cross-section type views
through the metal.
Disadvantages
The amplitude of the diffraction signals does not depend on the size of the defects and a
simple amplitude threshold cannot be applied for selecting the important reportable
defects, unlike pulse-echo inspections. TOFD easily detects pores, slag lines, inclusions
ete.
The main disadvantages of TOFD are,
2) no simple amplitude threshold for selecting reportable defects
b) all the TOFD inspection data has to be visually analysed in order to select the
reportable defects
©) not so suitable for defects near to the inspection surface since they may be
hidden by the lateral wave and the sizing accuracy deteriorates rapidly near to
the inspection surface,
Other Points
Chapter 3 TOFD technique page- 28 —
‘TOFD is no more accurate in estimating flaw length than standard pulse-echo techniques,
although by using various software algorithms (e.g. SAFT) the accuracy can be improved
Since a considerable operator effort is involved in the analysis of the TOFD data
experience and training are essential.
TOFD should be regarded as just another tool in the field of ultrasonic inspection and
sometimes it is more appropriate than pulse-echo and sometimes not. Very often a
‘combination of the two techniques is the best solution since the additional information is
often vital for defect characterisation.
As a consequence of the efficiency of detecting flaws, irrespective of their orientation,
TOED scans see all the flaws within the beam coverage. This can be initially rather
worrying, but it must be remembered that most of the flaws have been present since the
weld was fabricated and many of the smaller (volumetric) indications are generally not
important. Thus when it is known that a plant will have to be regularly inspected and
especially when flaw growth monitoring will be important it is strongly recommended that
the plant operators are persuaded to carry out a ‘base line’ or “fingerprinting” *
sspection. Such an inspection should be carried out as early as possible in the life of the
plant. This will enable the cracks which develop in service to be more reliably recognised
and monitored,
3.7 Basic Steps in the Sizing or Detection of Flaws
‘The basic steps to be used in an inspection for the collection and analysis of TOFD data
are,
a) Write/develop a procedure, a layout is suggested in Chapter 11.
b) Choose probe parameters, probe separation and basic A-scan parameters,
described in Chapter 5.
) Set-up data collection system and collect B- or D-scan data files, described in
Chapter 4, while equipment and probe calibration techniques are described in
Chapter 12.
4d) Analyse data for flaw size. The basic method of depth sizing is by using a
shaped cursor, which represents the response from a point source (Chapter 8).
The cursor is calibrated from the position of the lateral and backwall signals
(Chapter 6) and the sizing errors are derived in Chapter 6. The determination of
the lateral extent of the flaws is also described in Chapter 6. The problems in
complex geometry are briefly described in Chapter 9
©) Analyse data for flaw characterisation - Chapter 7. Various software
algorithms for aiding the interpretation are described in Chapter 8.
1) Write inspection report, a layout is suggested in Chapter 10.
Chapter 3 TOFD technique page- 29 —
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- D-10+ & D-20+ User's Guide June 2011 PDFDocument126 pagesD-10+ & D-20+ User's Guide June 2011 PDFdestonhenson100% (2)
- Probe Orbit of WeldDocument1 pageProbe Orbit of WelddestonhensonNo ratings yet
- Directive 055: Storage Requirements For The Upstream Petroleum IndustryDocument78 pagesDirective 055: Storage Requirements For The Upstream Petroleum IndustrydestonhensonNo ratings yet
- How To Upgrade Your DFD's SoftwareDocument6 pagesHow To Upgrade Your DFD's SoftwaredestonhensonNo ratings yet
- Belt GuideDocument35 pagesBelt Guidedestonhenson100% (1)
- Alert: Information Bulletin No. IB11-018 November 04, 2011Document1 pageAlert: Information Bulletin No. IB11-018 November 04, 2011destonhensonNo ratings yet
- Mill DotDocument3 pagesMill DotdestonhensonNo ratings yet