You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Soft Starter Wiring Diagram PDFDocument4 pagesSoft Starter Wiring Diagram PDFEdwin Cob GuriNo ratings yet
- Circuit-Breakers Inside LV Switchboards ABBDocument56 pagesCircuit-Breakers Inside LV Switchboards ABBffilepNo ratings yet
- Chapter 2 FinalDocument83 pagesChapter 2 FinalSana SaleemNo ratings yet
- Ex600 PDFDocument124 pagesEx600 PDFAlex Anishchyk75% (4)
- Part 4 Clark&ParkDocument47 pagesPart 4 Clark&ParkPaneendra KumarNo ratings yet
- 10 KW Solar Power PlantDocument8 pages10 KW Solar Power PlantPaneendra KumarNo ratings yet
- Thesis Report On Smart Energy MeterDocument12 pagesThesis Report On Smart Energy MeterFida Hussain100% (1)
- Crop Production Machinery Manufacturers Directory 2015 PDFDocument221 pagesCrop Production Machinery Manufacturers Directory 2015 PDFPaneendra Kumar100% (1)
- Grapes Raisin (Kishmish)Document8 pagesGrapes Raisin (Kishmish)Paneendra KumarNo ratings yet
- SSSCT Annual Report 2013-14-WebDocument131 pagesSSSCT Annual Report 2013-14-WebPaneendra KumarNo ratings yet
- ABB Brochure Generators For Wind Power LowRes - 31052012 PDFDocument12 pagesABB Brochure Generators For Wind Power LowRes - 31052012 PDFGibranNo ratings yet
- LeroySumer LSA 47.2Document12 pagesLeroySumer LSA 47.2Paneendra KumarNo ratings yet
- Heat Transfer OilDocument2 pagesHeat Transfer OilDony LieNo ratings yet
- Bolts Screws Hex Hexagon Nuts Washers Threaded Rods DIN 933 934 7989 125 127 4034 975 555 ISODocument43 pagesBolts Screws Hex Hexagon Nuts Washers Threaded Rods DIN 933 934 7989 125 127 4034 975 555 ISOgrover_ptNo ratings yet
- Over Current Co OrdDocument60 pagesOver Current Co OrdPaneendra KumarNo ratings yet
- Akshaya Linga Vhibo PDFDocument1 pageAkshaya Linga Vhibo PDFPaneendra KumarNo ratings yet
- 10 Pigeon Pea ProcessingDocument8 pages10 Pigeon Pea ProcessingPaneendra KumarNo ratings yet
- VvvfgghytrddDocument40 pagesVvvfgghytrddMonther Al-kalbaniNo ratings yet
- Phone1Document1 pagePhone1Prasad SNo ratings yet
- Wirelesssensornetworks PDFDocument416 pagesWirelesssensornetworks PDFJesus Sansonetti PNo ratings yet
- Kairatune Users ManualDocument11 pagesKairatune Users ManualHigor OliveiraNo ratings yet
- Release Notes For Cisco Aironet Access Points For Cisco IOS Release 12.3 (8) JEA3Document26 pagesRelease Notes For Cisco Aironet Access Points For Cisco IOS Release 12.3 (8) JEA3George PontikakosNo ratings yet
- NT DELPHI CRD2.xx MPC5566 MEB 1033 PDFDocument11 pagesNT DELPHI CRD2.xx MPC5566 MEB 1033 PDFGuto GtturboNo ratings yet
- David Mikael Nava Taclino BSED TLE 4A2: Laboratory ReportDocument12 pagesDavid Mikael Nava Taclino BSED TLE 4A2: Laboratory ReportDavid Mikael Nava TaclinoNo ratings yet
- Pipeline Adc ThesisDocument177 pagesPipeline Adc Thesisbhasin_hemant100% (1)
- SMF Single Mode Optical Fiber SSMFDocument2 pagesSMF Single Mode Optical Fiber SSMFbpr platinmods4No ratings yet
- Digital HourMeter and Counter Z2221N0G2FT00Document6 pagesDigital HourMeter and Counter Z2221N0G2FT00alone160162lNo ratings yet
- Aria Pick ModulesDocument68 pagesAria Pick ModulesCarlos Isaac Avilez Perez100% (1)
- APA102-1515 LED DatasheetDocument16 pagesAPA102-1515 LED DatasheetDaisyNo ratings yet
- Lecture: System Degradation and Power PenaltyDocument9 pagesLecture: System Degradation and Power PenaltyMohamed ShabanaNo ratings yet
- HT6P20 - Remote Control SystemDocument10 pagesHT6P20 - Remote Control SystemPaulo YamasakiNo ratings yet
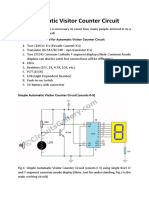
- Automatic Visitor Counter CircuitDocument4 pagesAutomatic Visitor Counter CircuithloNo ratings yet
- Chapter 3Document34 pagesChapter 3Alazar GetachewNo ratings yet
- MC500 User Manual 1-3 EngDocument28 pagesMC500 User Manual 1-3 EngPopa George CristianNo ratings yet
- DDI0337H Cortex m3 r2p0 TRMDocument133 pagesDDI0337H Cortex m3 r2p0 TRMAnand GopinathNo ratings yet
- Manual KRT2Document56 pagesManual KRT2Adrian TodeaNo ratings yet
- Fundamentals of DS3Document23 pagesFundamentals of DS3vvchalapathiNo ratings yet
- MozillaDocument11 pagesMozillaAnonymous 4oNIJHNo ratings yet
- Finfet Technology - Understanding and Productizing A New TransistorDocument10 pagesFinfet Technology - Understanding and Productizing A New TransistorThiruNo ratings yet
- Oleumtech Us8763455 PDFDocument16 pagesOleumtech Us8763455 PDFshadyghanemNo ratings yet
- Hopkinsos TestDocument3 pagesHopkinsos TestGANESH KUMAR B eee2018No ratings yet
- National Outlets PDFDocument1 pageNational Outlets PDFIvan BliminseNo ratings yet
- DMC 2 Gen2 Quick StartDocument2 pagesDMC 2 Gen2 Quick StartRogerNo ratings yet