You might also like
- RYOBI RY48110, RY48111, RY48112 RepairDocument31 pagesRYOBI RY48110, RY48111, RY48112 Repairjfair84No ratings yet
- Tristorosa by Heitor Villa Lobos PDFDocument9 pagesTristorosa by Heitor Villa Lobos PDFDimitrios Papaventsis100% (1)
- The Toyota Kata Practice Guide: Practicing Scientific Thinking Skills for Superior Results in 20 Minutes a DayFrom EverandThe Toyota Kata Practice Guide: Practicing Scientific Thinking Skills for Superior Results in 20 Minutes a DayRating: 4.5 out of 5 stars4.5/5 (7)
- Case Study - Gearbox FailureDocument16 pagesCase Study - Gearbox FailureRateesh VenugopalanNo ratings yet
- Crestaudio Pro 10004Document8 pagesCrestaudio Pro 10004Geronimo BassmanNo ratings yet
- Business Forecasting: The Box-Jenkins Method of ForecastingDocument22 pagesBusiness Forecasting: The Box-Jenkins Method of ForecastingNavinNo ratings yet
- Stringing Report 948337209294038Document1 pageStringing Report 948337209294038eameletricistapixNo ratings yet
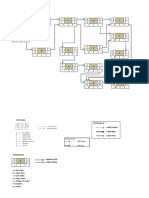
- Site Plan Option 2Document1 pageSite Plan Option 2Nicholas Ee Han MingNo ratings yet
- Caixa - SAFN-CXP-C02 (CE170) - 20 - 07 - 2021 - 06 - 18 - 35Document1 pageCaixa - SAFN-CXP-C02 (CE170) - 20 - 07 - 2021 - 06 - 18 - 35Mateus SousaNo ratings yet
- Caixa - SAFN-CXP-C02 (CE170) - 20 - 07 - 2021 - 06 - 18 - 35Document1 pageCaixa - SAFN-CXP-C02 (CE170) - 20 - 07 - 2021 - 06 - 18 - 35Mateus SousaNo ratings yet
- P 170 T SmartDocument2 pagesP 170 T SmartRyo ArdhiNo ratings yet
- 3rdsem Program&Soln (2022) - 2Document2 pages3rdsem Program&Soln (2022) - 2Gobind MohantyNo ratings yet
- Fendt Xylon 524 Spare Parts 4Document60 pagesFendt Xylon 524 Spare Parts 4RB Dienstverlening100% (1)
- Licad86061000006 L10Document1 pageLicad86061000006 L10Sakeel WagirkhanNo ratings yet
- BF 4RPDocument2 pagesBF 4RPsamuel madiba nindemanaNo ratings yet
- Operating Instructions For Desauty'S Bridge: I I JWC JWCDocument5 pagesOperating Instructions For Desauty'S Bridge: I I JWC JWCAnuNo ratings yet
- ប្លង់ជណ្តើរកែរ១Document1 pageប្លង់ជណ្តើរកែរ១yoeuy zeodyNo ratings yet
- Rev. Description Drawn Appr. Date Scale: Drg/Part No. 1:25 HolderDocument3 pagesRev. Description Drawn Appr. Date Scale: Drg/Part No. 1:25 HolderMalek KhaledNo ratings yet
- Total Length 60824 27 Modules 30040 27 Modules 30040: Machicura - ColbunDocument1 pageTotal Length 60824 27 Modules 30040 27 Modules 30040: Machicura - ColbuncsinnovacionNo ratings yet
- 4mccullocha: Downloaded FromDocument4 pages4mccullocha: Downloaded FromPablo LoboNo ratings yet
- Lamp RunwayTurnoff TaxiLightDocument1 pageLamp RunwayTurnoff TaxiLightBongyoun LeeNo ratings yet
- RD-M972 RD-M972: XTR Rear DerailleurDocument1 pageRD-M972 RD-M972: XTR Rear DerailleurJonah HexNo ratings yet
- RD-M972 RD-M972: XTR Rear DerailleurDocument1 pageRD-M972 RD-M972: XTR Rear DerailleurJonah HexNo ratings yet
- O OJT 06 Acceptance Form For OJTDocument1 pageO OJT 06 Acceptance Form For OJTRuellynne Barberan BonifacioNo ratings yet
- Arti Monitor Panel PDFDocument10 pagesArti Monitor Panel PDFWawan SetiawanNo ratings yet
- Jujutsu Kaisen OP TABSDocument1 pageJujutsu Kaisen OP TABSIzumiNo ratings yet
- GH 13Document2 pagesGH 13DanLucca Fernando SamosirNo ratings yet
- Camisa Polo MASCULINA RAGLANDocument1 pageCamisa Polo MASCULINA RAGLANanamedel72No ratings yet
- Hokey Pokey: PerformanceDocument3 pagesHokey Pokey: PerformanceterzianoNo ratings yet
- Tugas (1) BBDocument5 pagesTugas (1) BBChusna AzzNo ratings yet
- P 140 T en (Bbe)Document2 pagesP 140 T en (Bbe)CollenNo ratings yet
- VL 11 cd1Document1 pageVL 11 cd1Nguyen Hong NhutNo ratings yet
- VL 11 cd3Document1 pageVL 11 cd3Nguyen Hong Nhut100% (2)
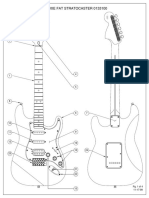
- Deluxe Double Fat Stratocaster 0133300Document4 pagesDeluxe Double Fat Stratocaster 0133300Day IskandarNo ratings yet
- Stirling Coffee Cup Project J.RIDDERS PDFDocument5 pagesStirling Coffee Cup Project J.RIDDERS PDFAlberto Jorge PridaNo ratings yet
- Elevation Section: PMK International Consult LLCDocument1 pageElevation Section: PMK International Consult LLCAhsan KhanNo ratings yet
- Tristorosa by Heitor Villa LobosDocument9 pagesTristorosa by Heitor Villa LobosmosabbfNo ratings yet
- Tristorosa by Heitor Villa LobosDocument9 pagesTristorosa by Heitor Villa LobosNhan DangNo ratings yet
- Tristorosa - Heitor Villa LobosDocument9 pagesTristorosa - Heitor Villa LobosPhùng Thái DươngNo ratings yet
- 0 A 1 1 2 1 1 2 C 4 2 4 3 2 4 D 6 4 6 4 2 6 I 8 6 8 9 2Document2 pages0 A 1 1 2 1 1 2 C 4 2 4 3 2 4 D 6 4 6 4 2 6 I 8 6 8 9 2Amimah HashifahNo ratings yet
- 292 KN 292 KN 292 KN 292 KN 292 KN: ToolbarDocument1 page292 KN 292 KN 292 KN 292 KN 292 KN: ToolbaratikahasfiworkNo ratings yet
- O.S. Engines .12TR Engine ManualDocument1 pageO.S. Engines .12TR Engine ManualPeter AiuraNo ratings yet
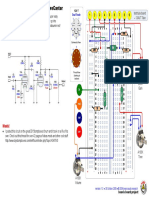
- TTB ValvecasterDocument1 pageTTB ValvecasterFernando de LuccaNo ratings yet
- Grafice in ExcelDocument2 pagesGrafice in ExcelDragManoNo ratings yet
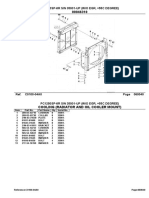
- Cooling Radiator and Oil CooleDocument1 pageCooling Radiator and Oil CooleCalon KayaNo ratings yet
- HOP4 TabsDocument1 pageHOP4 TabsNykolaz GodoyNo ratings yet
- Steel Option 1 2250 MTDocument9 pagesSteel Option 1 2250 MTSONNENo ratings yet
- Detail 1: Principal DimensionsDocument1 pageDetail 1: Principal DimensionsBetto DiazNo ratings yet
- Case Study - Gearbox FailureDocument16 pagesCase Study - Gearbox FailureRateesh VenugopalanNo ratings yet
- Schema Aansluiting Nieuwe Joystick 3701.0012Document2 pagesSchema Aansluiting Nieuwe Joystick 3701.0012Robin De WaeleNo ratings yet
- Electrical Machinery - Fitzgerald-427-428Document2 pagesElectrical Machinery - Fitzgerald-427-428Marvin LiraNo ratings yet
- Zadaci Riješeni Primjeri Za Vježbu 1. Koeficijent KorelacijeDocument3 pagesZadaci Riješeni Primjeri Za Vježbu 1. Koeficijent KorelacijeNermina MevkicNo ratings yet
- Section Thru "C-C": Province of GuimarasDocument1 pageSection Thru "C-C": Province of GuimarasHerbee ZevlagNo ratings yet
- Gato Oleoneumático de Garaje Air Hydraulic Trolley Jack Cric Oléopneumatique Rouleur Hydraulisch-Pneumatischer HeberDocument11 pagesGato Oleoneumático de Garaje Air Hydraulic Trolley Jack Cric Oléopneumatique Rouleur Hydraulisch-Pneumatischer HeberAlain DefoeNo ratings yet
- 013-3100C Sisd PDFDocument4 pages013-3100C Sisd PDFCarl Ivan Gambala100% (1)
- 013-3100C Sisd PDFDocument4 pages013-3100C Sisd PDFCarl Ivan GambalaNo ratings yet
- Aem Infographiste 20221107 20221130Document1 pageAem Infographiste 20221107 20221130Benjamin RiolletNo ratings yet
- BilledStatements 7146 17-08-23 23.40Document1 pageBilledStatements 7146 17-08-23 23.40Udhasu NayakNo ratings yet
- ManualDocument6 pagesManualAfzal mvivoNo ratings yet