You might also like
- PC 2Document6 pagesPC 2anderson ayala castañedaNo ratings yet
- A.4 Tratamiento de LDocument72 pagesA.4 Tratamiento de LAntonio BedoyaNo ratings yet
- Controladores Monofasicos BidirecionalesDocument7 pagesControladores Monofasicos BidirecionalesWalter RiveroNo ratings yet
- Practica 3 Elec PotenciaDocument10 pagesPractica 3 Elec PotenciaAdriana NavarreteNo ratings yet
- S03 - Presentacion Tecnica - ITB 2014 REGULADORES PDFDocument30 pagesS03 - Presentacion Tecnica - ITB 2014 REGULADORES PDFFRANK RMNo ratings yet
- Proyecto de Ingenieria InversaDocument15 pagesProyecto de Ingenieria InversaYuberki S. PuelloNo ratings yet
- Control en Modos de Voltaje y de Corriente para La Generación de Señales PWM en Reguladores de Conmutación CC-CC - DigiKeyDocument5 pagesControl en Modos de Voltaje y de Corriente para La Generación de Señales PWM en Reguladores de Conmutación CC-CC - DigiKeyGio srzNo ratings yet
- Protecciones ElectricasDocument6 pagesProtecciones ElectricasMartin Daniel Vinces AlavaNo ratings yet
- Elementos de La ExcitatrizDocument7 pagesElementos de La ExcitatrizCarlos Eduardo SalazarNo ratings yet
- Trabajo Fuente Conmutada Tipo Step DownDocument21 pagesTrabajo Fuente Conmutada Tipo Step DownMiguel AlvarezNo ratings yet
- Fase 2Document7 pagesFase 2Angel GarciaNo ratings yet
- Convertidores CA-CADocument3 pagesConvertidores CA-CAVictor Manuel Simbron CabreraNo ratings yet
- Rectificador Onda Completa Con TiritoresDocument4 pagesRectificador Onda Completa Con TiritoresFernando Cruz AntelisNo ratings yet
- Variadores de Velocidad NuevoDocument257 pagesVariadores de Velocidad NuevoRaúl Padilla Sánchez100% (2)
- Informe DC A ACDocument10 pagesInforme DC A ACHectorVargasNo ratings yet
- Tarea Convertidores Ca-CaDocument16 pagesTarea Convertidores Ca-CaAndres Rilop100% (1)
- Proyecto Control AVR y LFCDocument49 pagesProyecto Control AVR y LFCCarlos Bernal100% (1)
- Análisis Etapa de PotenciaDocument17 pagesAnálisis Etapa de PotenciaGiovanny MotoaNo ratings yet
- Transitorios IntroducionDocument25 pagesTransitorios IntroducionFuentez Jayko100% (1)
- Convertidores Ac - AcDocument40 pagesConvertidores Ac - AcBrayan CuetoNo ratings yet
- Tarea Tema 1 #5Document6 pagesTarea Tema 1 #5miguer2470No ratings yet
- Control EscalarDocument28 pagesControl EscalarFrancisco PachecoNo ratings yet
- Examen-Unidad 3 - Potencia - David Staser ToralDocument5 pagesExamen-Unidad 3 - Potencia - David Staser ToralDavid Staser ToralNo ratings yet
- Ejemplo de Trabajo Preparatorio - LaboratorioDocument8 pagesEjemplo de Trabajo Preparatorio - LaboratorioTITO AVILESNo ratings yet
- Norma Cadafe - Especif. Tecnicas de Reguladores para Redes de M.TDocument24 pagesNorma Cadafe - Especif. Tecnicas de Reguladores para Redes de M.Tbasilio1a100% (1)
- Estabilizador de Tension de 4 PasosDocument4 pagesEstabilizador de Tension de 4 PasosLane ClaudioNo ratings yet
- Aplicación de La Modulación PWM en VFDocument50 pagesAplicación de La Modulación PWM en VFJavier Cabrera100% (2)
- Variador 4Document4 pagesVariador 4Josue CortesNo ratings yet
- Instalación variador frecuenciaDocument11 pagesInstalación variador frecuenciaIgnacio Antonio Arevalo BudaleoNo ratings yet
- Control Primario Secundario VoltajeDocument5 pagesControl Primario Secundario VoltajeRaul NeiraNo ratings yet
- Control Motor Tiristor PDFDocument5 pagesControl Motor Tiristor PDFhyu2123No ratings yet
- Sistemas HidráulicosDocument6 pagesSistemas Hidráulicosmedievolo100% (1)
- Introducción a los controles Cummins PowergenDocument130 pagesIntroducción a los controles Cummins PowergenBryan Anderson100% (9)
- VVVF AscensorDocument24 pagesVVVF AscensorReynold SuarezNo ratings yet
- ELECTRONICADocument5 pagesELECTRONICAYolimar MedinaNo ratings yet
- Teoría de Variadores Formato ABB PDFDocument34 pagesTeoría de Variadores Formato ABB PDFFuentez Jayko100% (1)
- Practica 3Document47 pagesPractica 3AndersonNo ratings yet
- ACCIONAMIENTO DE MOTORES Y ETAPAS DE UN INVERSOR DC-ACDocument13 pagesACCIONAMIENTO DE MOTORES Y ETAPAS DE UN INVERSOR DC-ACJavier E. PinzónNo ratings yet
- Variadores de velocidad PWM para motores ACDocument11 pagesVariadores de velocidad PWM para motores ACRoberto Moo JiménezNo ratings yet
- Traducción Rele DiferencialDocument7 pagesTraducción Rele DiferencialfgteNo ratings yet
- Variadores de Velocidad NuevoDocument173 pagesVariadores de Velocidad NuevoManuel TarrilloNo ratings yet
- Informe Control de FaseDocument10 pagesInforme Control de FaseFernanda MorenoNo ratings yet
- Monografia Reguladores de VoltajeDocument6 pagesMonografia Reguladores de VoltajeGari1961100% (1)
- Tecnicas para Variar La Velocidad de Motores de CD y CADocument11 pagesTecnicas para Variar La Velocidad de Motores de CD y CAVictor NuñezNo ratings yet
- Laboratorio 4 CompletoDocument20 pagesLaboratorio 4 CompletoStalin CaisaguanoNo ratings yet
- ClasificacionDocument10 pagesClasificacionAbdielJimenezAlarconNo ratings yet
- Laboratorio 1 Electronica de PotenciaDocument11 pagesLaboratorio 1 Electronica de PotenciaCesar LeonardoNo ratings yet
- Schneider Electric, Telemecanique, Altivar 18 - J Llanos, O Genova, M OrozcoDocument15 pagesSchneider Electric, Telemecanique, Altivar 18 - J Llanos, O Genova, M OrozcoJota Mario LlanosNo ratings yet
- Control vectorial de motores AC en la Universidad de Santiago de ChileDocument47 pagesControl vectorial de motores AC en la Universidad de Santiago de ChileAngel CastilloNo ratings yet
- CICLOCONVERTIDORESDocument61 pagesCICLOCONVERTIDORESYasmani Aldo Hq100% (1)
- 24 Volumen III - Parte C-Transformadores K41713Document92 pages24 Volumen III - Parte C-Transformadores K41713Max FerreNo ratings yet
- Control Primario y Secundario de VoltajeDocument4 pagesControl Primario y Secundario de VoltajeJoseph JenningsNo ratings yet
- Regulador Automático de Energía ReactivaDocument32 pagesRegulador Automático de Energía Reactivaasalasv65No ratings yet
- ExcitatrizDocument2 pagesExcitatrizGerardo Contreras SanchezNo ratings yet
- Inversor 12 VDC A 120Document13 pagesInversor 12 VDC A 120jesus gomezNo ratings yet
- Reporte 1 de Control de Motores PDFDocument13 pagesReporte 1 de Control de Motores PDFJosé ManuelNo ratings yet
- Epiroc DML Seccion 2 Controles Electhidrau Actuadores y ValvulasDocument22 pagesEpiroc DML Seccion 2 Controles Electhidrau Actuadores y ValvulasEmanuel Nicolas Villarruel100% (2)
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoFrom EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoRating: 4 out of 5 stars4/5 (4)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoFrom EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoRating: 5 out of 5 stars5/5 (1)
- Comunicación ÓpticaDocument1 pageComunicación ÓpticaschuberthjoseNo ratings yet
- EjemploDocument2 pagesEjemploschuberthjoseNo ratings yet
- Aislamiento DefinicionesDocument1 pageAislamiento DefinicionesschuberthjoseNo ratings yet
- Lectura y ResumenDocument1 pageLectura y ResumenschuberthjoseNo ratings yet
- Practica Diferencial ProteccionDocument4 pagesPractica Diferencial ProteccionschuberthjoseNo ratings yet
- Basica Descripcion de Pruebas End To EndDocument1 pageBasica Descripcion de Pruebas End To EndschuberthjoseNo ratings yet
- Corriente PararrayoDocument1 pageCorriente PararrayoschuberthjoseNo ratings yet
- Ejempo de Resolucion de Problema Calculo Electromecanico LineaDocument4 pagesEjempo de Resolucion de Problema Calculo Electromecanico LineaschuberthjoseNo ratings yet
- Calculo de Catenaria Linea TransDocument4 pagesCalculo de Catenaria Linea TransschuberthjoseNo ratings yet
- Breaker Falla ProteccionDocument2 pagesBreaker Falla ProteccionschuberthjoseNo ratings yet
- Protocolo de Comunicación ResumenDocument1 pageProtocolo de Comunicación ResumenschuberthjoseNo ratings yet
- Guia Basica para Prueba de Cables Según La IeeeDocument1 pageGuia Basica para Prueba de Cables Según La IeeeschuberthjoseNo ratings yet
- SobrevoltajesDocument1 pageSobrevoltajesschuberthjoseNo ratings yet
- Proteccion de Transformadores BasicoDocument6 pagesProteccion de Transformadores BasicoschuberthjoseNo ratings yet
- Protección Diferencial de Ata ImpedanciaDocument2 pagesProtección Diferencial de Ata ImpedanciaschuberthjoseNo ratings yet
- Cargabilidad de TrafosDocument2 pagesCargabilidad de TrafosschuberthjoseNo ratings yet
- Nociones Diseño Optimo Trafos 16-17Document10 pagesNociones Diseño Optimo Trafos 16-17schuberthjoseNo ratings yet
- Utilización de La Información en Sistemas de Control y ProtecciónDocument1 pageUtilización de La Información en Sistemas de Control y ProtecciónschuberthjoseNo ratings yet
- Resumen Corrientes de InrushDocument2 pagesResumen Corrientes de Inrushschuberthjose100% (1)
- Selección de Aislamiento para Altura Superior A 1000mDocument8 pagesSelección de Aislamiento para Altura Superior A 1000mschuberthjoseNo ratings yet
- Resumen de PararrayosDocument3 pagesResumen de PararrayosschuberthjoseNo ratings yet
- Proyecto Guia de Estilo de Bases de Datos en SistemasDocument19 pagesProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseNo ratings yet
- Calculos de Proteccion de Distancia Con Falla A TierraDocument13 pagesCalculos de Proteccion de Distancia Con Falla A TierraschuberthjoseNo ratings yet
- Proyecto Guia de Estilo de Bases de Datos en SistemasDocument15 pagesProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseNo ratings yet
- PROYECTODocument12 pagesPROYECTOschuberthjoseNo ratings yet
- Coordinación de Proteccion Direccional Sobre CorrienteDocument19 pagesCoordinación de Proteccion Direccional Sobre CorrienteschuberthjoseNo ratings yet
- Proyecto Guia de Estilo de Bases de Datos en SistemasDocument19 pagesProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseNo ratings yet
- Proteccion DiferencialDocument2 pagesProteccion DiferencialschuberthjoseNo ratings yet
- Capturas de Información de Conceptos de MicroeconomíaDocument34 pagesCapturas de Información de Conceptos de MicroeconomíaschuberthjoseNo ratings yet
- Introducción A La Ing. Industrial Sesión 005aDocument8 pagesIntroducción A La Ing. Industrial Sesión 005asalvadorNo ratings yet
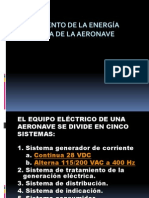
- Pres Energia Es PDFDocument51 pagesPres Energia Es PDFdarwin gualotoNo ratings yet
- Revisión líneaDocument3 pagesRevisión líneaCristian AdrianNo ratings yet
- Subsistema de Integración de Recursos HumanosDocument8 pagesSubsistema de Integración de Recursos HumanosPamela BarriaNo ratings yet
- Asesores Junior y SeniorDocument2 pagesAsesores Junior y SeniorLizbeth Parodi CastroNo ratings yet
- Manual LinkedinDocument52 pagesManual LinkedinRecursos Humanos Cedhinfo100% (1)
- Que Son Los Medios y Recursos DidacticosDocument2 pagesQue Son Los Medios y Recursos DidacticosNELIDA CCAHUAYA PUMANo ratings yet
- TesinaDocument23 pagesTesinaElizabeth MarinNo ratings yet
- Informe de MecanismosDocument61 pagesInforme de MecanismosJonathan BatistaNo ratings yet
- Universidad Tecnológica Del Perú:: Semana 10-Tarea Academica 2Document12 pagesUniversidad Tecnológica Del Perú:: Semana 10-Tarea Academica 2Fernando Trigoso GonzalesNo ratings yet
- Proyecto EditableDocument3 pagesProyecto EditableDiego MoralesNo ratings yet
- El Hombre BicentenarioDocument6 pagesEl Hombre BicentenarioYesica locampoNo ratings yet
- Borrador Con Cajas de Texto para Escribir Fácil de Gta Feria Científica ImprimirDocument9 pagesBorrador Con Cajas de Texto para Escribir Fácil de Gta Feria Científica ImprimirCarol Espinoza Gómez100% (2)
- E-Book Community ManagerDocument234 pagesE-Book Community Managercarolina yépezNo ratings yet
- Induccion Estadistica y Probabilidad 2021Document63 pagesInduccion Estadistica y Probabilidad 2021Edwin O. MolinaNo ratings yet
- Unidad 3Document28 pagesUnidad 3IVAN HUAYHUA MACEDONo ratings yet
- Formato Matriz de TriangulaciónDocument1 pageFormato Matriz de Triangulaciónjaime_castroNo ratings yet
- Auditoria de Sistemas ComputarizadoDocument6 pagesAuditoria de Sistemas ComputarizadoWilliam Hidalgo0% (1)
- Fase2 Grupo 299011 4Document12 pagesFase2 Grupo 299011 4Luis Alcides SantanaNo ratings yet
- Test Conceptual Gerenciamiento Estratégico 2021Document8 pagesTest Conceptual Gerenciamiento Estratégico 2021Gusty Lopez100% (1)
- Ejercicios 3aDocument2 pagesEjercicios 3aBio InstrumentalNo ratings yet
- RODETES e ImpulsoresDocument24 pagesRODETES e ImpulsoresPaul CabreraNo ratings yet
- Global Mapper 18 EsDocument2 pagesGlobal Mapper 18 EsEsteban Alerto ChapanaNo ratings yet
- Presentacion - El Grafeno y Sus AplicacionesDocument10 pagesPresentacion - El Grafeno y Sus Aplicacioneskeren martinezNo ratings yet
- Solicitud de Visado Nacional - ESP CHI ENGDocument5 pagesSolicitud de Visado Nacional - ESP CHI ENGAnonymous MJX6BaJyXZNo ratings yet
- BAE - UT1 - Introducción A Las Bases de DatosDocument29 pagesBAE - UT1 - Introducción A Las Bases de DatostrashmailsnorlaxNo ratings yet
- Investigacion TecnologicaDocument2 pagesInvestigacion TecnologicaBarock BlackNo ratings yet
- Polirox - Reporte de Tru Trac 10 Feb - 19 02 10Document12 pagesPolirox - Reporte de Tru Trac 10 Feb - 19 02 10A̶l̶x̶a̶n̶d̶e̶r̶ PaniNo ratings yet
- Windows Linux Dispositivos ExtraiblesDocument2 pagesWindows Linux Dispositivos Extraiblesjhon eduar campo ladeuthNo ratings yet
- RectificadoresFiltrosDocument4 pagesRectificadoresFiltrosJorge EspinosaNo ratings yet