You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Consent For Transfer of Citi Relationships To Axis Bank: BackgroundDocument8 pagesConsent For Transfer of Citi Relationships To Axis Bank: Backgroundvikas310No ratings yet
- Liberty Cashback TNCDocument22 pagesLiberty Cashback TNCvikas310No ratings yet
- Elements of Sound JudgmentDocument57 pagesElements of Sound Judgmentvikas310No ratings yet
- Designing A Spartan-3 FPGA DDR Memory InterfaceDocument2 pagesDesigning A Spartan-3 FPGA DDR Memory Interfacevikas310No ratings yet
- Filter Design Methods For Fpgas: Accelchip, Inc. 1900 Mccarthy Blvd. Suite 204 Milpitas, Ca 95035 (408) 943-0700Document10 pagesFilter Design Methods For Fpgas: Accelchip, Inc. 1900 Mccarthy Blvd. Suite 204 Milpitas, Ca 95035 (408) 943-0700vikas310No ratings yet
- The Six Thinking HatsDocument16 pagesThe Six Thinking Hatsvikas310No ratings yet
- Never Design Another FIFODocument2 pagesNever Design Another FIFOvikas310No ratings yet
- HDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and PowerDocument4 pagesHDL Coding and Design Practices For Improving Virtex-5 Utilization, Performance, and Powervikas310No ratings yet
- Bit Error Ratio: What Is It? What Does It Mean?: WP322 (v1.0) March 28, 2008Document4 pagesBit Error Ratio: What Is It? What Does It Mean?: WP322 (v1.0) March 28, 2008vikas310No ratings yet
- Designing A Spartan-3 FPGA DDR Memory InterfaceDocument2 pagesDesigning A Spartan-3 FPGA DDR Memory Interfacevikas310No ratings yet
- Cloud Comp SynopsisDocument10 pagesCloud Comp Synopsisvikas310No ratings yet
- In This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design RulesDocument3 pagesIn This Article, Eric Gives An Overview of The Benefits of Using Fpgas in DSP Design and Concludes With A List of Recommended Design Rulesvikas310No ratings yet
- Computer Security - Network SecurityDocument32 pagesComputer Security - Network Securityvikas310No ratings yet
- Ric or Secret Key Cryptography and Asymmetric or Public Key Cryptography. SymmetDocument12 pagesRic or Secret Key Cryptography and Asymmetric or Public Key Cryptography. Symmetvikas310No ratings yet
- GoogleDocument2 pagesGooglevikas310No ratings yet
- Fpga Lec 3-4 Logic ImplementationDocument64 pagesFpga Lec 3-4 Logic Implementationvikas310No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Proxmox VE - Ceph Benchmark 201802 PDFDocument10 pagesProxmox VE - Ceph Benchmark 201802 PDFDinas Pendidikan Kota Surabaya100% (1)
- Installing TriCaster 40 PDFDocument8 pagesInstalling TriCaster 40 PDFpregador@bol.com.brNo ratings yet
- McpuDocument6 pagesMcputpsa6668No ratings yet
- Manual de Reparación - PB EasyNote TJ66Document188 pagesManual de Reparación - PB EasyNote TJ66ifontal24610% (1)
- Cisco Wireless LAN Controller - Configuration Guide PDFDocument696 pagesCisco Wireless LAN Controller - Configuration Guide PDFMiguel MazaNo ratings yet
- USB SerialDocument9 pagesUSB Serialshafqat.aNo ratings yet
- Fit AP v200r005c10spcd00 (&ac) Upgrade GuideDocument10 pagesFit AP v200r005c10spcd00 (&ac) Upgrade GuideJuan AriasNo ratings yet
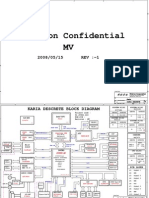
- HP Elitebook 6930p Wistron Karia Rev - 1 SCHDocument58 pagesHP Elitebook 6930p Wistron Karia Rev - 1 SCHWade DyerNo ratings yet
- Smart Online Electrical Billing Management System SOEBIMS Using GSMDocument24 pagesSmart Online Electrical Billing Management System SOEBIMS Using GSMjawadabbassNo ratings yet
- Data Warehousing and BADocument77 pagesData Warehousing and BAMohit NarayanNo ratings yet
- 802.11r Voice-Enterprise CertificationDocument13 pages802.11r Voice-Enterprise CertificationmrsanNo ratings yet
- Assignment 1 - Technical Description QR CodeDocument7 pagesAssignment 1 - Technical Description QR Codeapi-359176976No ratings yet
- Chapter 7 Lab 7-1, Synchronizing Campus Network Devices Using Network Time Protocol (NTP)Document20 pagesChapter 7 Lab 7-1, Synchronizing Campus Network Devices Using Network Time Protocol (NTP)Erid RocaNo ratings yet
- IbaPADU-8-M v1.9 en A4Document39 pagesIbaPADU-8-M v1.9 en A4Rodrigo Antonio Burboa CalistoNo ratings yet
- 3crwe454g72 RNDocument4 pages3crwe454g72 RNDaniel Mora BaltaNo ratings yet
- ProactiveNet Release NotesDocument76 pagesProactiveNet Release NotesCharl11eNo ratings yet
- IEEE Projects 2014 - 2015 Abstracts - Sensor 03Document3 pagesIEEE Projects 2014 - 2015 Abstracts - Sensor 03Final Year Projects 2014No ratings yet
- HT-S3500 (B) : 5.1Ch Home Theater System ModelDocument37 pagesHT-S3500 (B) : 5.1Ch Home Theater System ModelPaulo chagas paulo ratoNo ratings yet
- IjuykDocument754 pagesIjuykAbhishek MalikNo ratings yet
- Requir MentDocument6 pagesRequir MentEstuKurniawanNo ratings yet
- Closing Cockpit SAPDocument8 pagesClosing Cockpit SAPPratik KakadiyaNo ratings yet
- Report Project Alarm TyaDocument19 pagesReport Project Alarm TyatyapihNo ratings yet
- Electronic Communication by Roddy and Coolen FreeDocument4 pagesElectronic Communication by Roddy and Coolen Freejoker98950% (6)
- Patch/Hotfix Installation Instructions: Manual DownloadDocument3 pagesPatch/Hotfix Installation Instructions: Manual DownloadfrancescosalsaNo ratings yet
- Oracle DBA Best PracticesDocument9 pagesOracle DBA Best PracticesSumit KNo ratings yet
- H 71 0200 0320 en - CU-E2x - Technical DataDocument2 pagesH 71 0200 0320 en - CU-E2x - Technical DataCarlos SandersNo ratings yet
- Atlas - An Environment For Noc Generation and Evaluation: Aline Mello Ney Calazans and Fernando MoraesDocument2 pagesAtlas - An Environment For Noc Generation and Evaluation: Aline Mello Ney Calazans and Fernando MoraesMehdi AyoubNo ratings yet
- TasmDocument33 pagesTasmvishnuhost67% (3)
- Palo Alto Networks - Edu 210: Document VersionDocument21 pagesPalo Alto Networks - Edu 210: Document VersionElbarni MohamedNo ratings yet