You might also like
- 599 PaperDocument4 pages599 PaperMohammed BadiNo ratings yet
- On Simultaneous Wireless Information and Power Transfer For Receive Spatial ModulationDocument8 pagesOn Simultaneous Wireless Information and Power Transfer For Receive Spatial ModulationgaraceNo ratings yet
- Weighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsDocument8 pagesWeighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsJavier MelendrezNo ratings yet
- Large System Analysis of Power Normalization Techniques in Massive MIMODocument13 pagesLarge System Analysis of Power Normalization Techniques in Massive MIMOSoumitra BhowmickNo ratings yet
- Physical Communication: Mário Marques Da Silva Rui DinisDocument8 pagesPhysical Communication: Mário Marques Da Silva Rui DinisSubhankarBhattacharjeeNo ratings yet
- Generalised Pre-Coding Aided Spatial Modulation: Rong Zhang, Lie-Liang Yang and Lajos HanzoDocument10 pagesGeneralised Pre-Coding Aided Spatial Modulation: Rong Zhang, Lie-Liang Yang and Lajos Hanzohendra lamNo ratings yet
- How To Scale Up The Spectral Efficiency of Multi-Way Massive MIMO Relaying?Document6 pagesHow To Scale Up The Spectral Efficiency of Multi-Way Massive MIMO Relaying?hendra lamNo ratings yet
- Achieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasDocument14 pagesAchieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasBruno AlvimNo ratings yet
- Massive NOMA Relay Boosts Spectral EfficiencyDocument15 pagesMassive NOMA Relay Boosts Spectral EfficiencyngmaherNo ratings yet
- Least Square Regressor Selection Based Detection For Uplink 5G Massive MIMO SystemsDocument6 pagesLeast Square Regressor Selection Based Detection For Uplink 5G Massive MIMO SystemskiranpatruduNo ratings yet
- Mimo Antenna DissertationDocument8 pagesMimo Antenna DissertationWriteMyPhilosophyPaperMilwaukee100% (1)
- Massive MIMO in Real Propagation Environments: Do All Antennas Contribute Equally?Document12 pagesMassive MIMO in Real Propagation Environments: Do All Antennas Contribute Equally?mohanNo ratings yet
- Spatially Sparse Precoding in Millimeter Wave MIMO SystemsDocument15 pagesSpatially Sparse Precoding in Millimeter Wave MIMO SystemsFahd SaifNo ratings yet
- Duo BinaryDocument8 pagesDuo BinaryFarhan FarhanNo ratings yet
- NOMA For Correlated Information Sources in 5G SystemsDocument5 pagesNOMA For Correlated Information Sources in 5G SystemsMahrukh BalochNo ratings yet
- Performance Assessment of Mimo Precoding On Realistic Mmwave ChannelsDocument6 pagesPerformance Assessment of Mimo Precoding On Realistic Mmwave ChannelsBereketeab ZinabuNo ratings yet
- 2006.00899 (1)Document13 pages2006.00899 (1)Divya TNo ratings yet
- HYBRID MMSEDocument6 pagesHYBRID MMSEMerlin Gilbert RajNo ratings yet
- IEEE Transactions on Wireless Communications Optimal Diversity-Multiplexing TradeoffDocument10 pagesIEEE Transactions on Wireless Communications Optimal Diversity-Multiplexing Tradeoffhendra lamNo ratings yet
- Multi-User Linear Precoding For Multi-Polarized Massive MIMO System Under Imperfect CSITDocument16 pagesMulti-User Linear Precoding For Multi-Polarized Massive MIMO System Under Imperfect CSITTewelgn KebedeNo ratings yet
- Performance Analysis of Massive MIMO For Cell-Boundary UsersDocument15 pagesPerformance Analysis of Massive MIMO For Cell-Boundary UsersFakhar AbbasNo ratings yet
- yu2015Document6 pagesyu2015Zorba ZorbaNo ratings yet
- Transmit Antenna Selection For Massive MIMO: A Knapsack Problem FormulationDocument6 pagesTransmit Antenna Selection For Massive MIMO: A Knapsack Problem FormulationFarah AkifNo ratings yet
- Gwak 2019Document16 pagesGwak 2019Yadesa BedasaNo ratings yet
- Optimization of MIMO Detectors: Unleashing The Multiplexing GainDocument5 pagesOptimization of MIMO Detectors: Unleashing The Multiplexing GainHarishchandra DubeyNo ratings yet
- Beliefdetection PDFDocument6 pagesBeliefdetection PDFblokesNo ratings yet
- Masouros 1570311215Document6 pagesMasouros 1570311215Zorba ZorbaNo ratings yet
- Dynamic Sidelobe Multiplexing in Beamspace MIMO SystemsDocument4 pagesDynamic Sidelobe Multiplexing in Beamspace MIMO SystemsPalungan KecilNo ratings yet
- Deep Channel Learning For Large Intelligent Surfaces Aided Mm-Wave Massive MIMO SystemsDocument5 pagesDeep Channel Learning For Large Intelligent Surfaces Aided Mm-Wave Massive MIMO SystemsJack Van JhonesNo ratings yet
- Low-Complexity Distributed XL-MIMO For Multiuser DetectionDocument6 pagesLow-Complexity Distributed XL-MIMO For Multiuser DetectionBereketeab ZinabuNo ratings yet
- Emerging MIMO Technologies: Distributed, Cooperative, Massive, 3D, and Full Dimension MIMODocument13 pagesEmerging MIMO Technologies: Distributed, Cooperative, Massive, 3D, and Full Dimension MIMOOwaisKhanNo ratings yet
- Distributed Channel Estimation for Massive MIMO-OFDM SystemsDocument16 pagesDistributed Channel Estimation for Massive MIMO-OFDM SystemsThelase ManNo ratings yet
- Beamspace MIMO NOMADocument13 pagesBeamspace MIMO NOMAabazer ahmedNo ratings yet
- Multi-Layer Precoding Boosts Full-Dimensional MIMODocument5 pagesMulti-Layer Precoding Boosts Full-Dimensional MIMOabdelNo ratings yet
- Hybrid Precoding For Multi-Group Multicasting in Mmwave SystemsDocument7 pagesHybrid Precoding For Multi-Group Multicasting in Mmwave SystemsDavid SalahNo ratings yet
- Ijcsi 8 3 2 596 601Document6 pagesIjcsi 8 3 2 596 601ubedlohaniNo ratings yet
- Hybrid Block Diagonalization For Massive Multiuser MIMO SystemsDocument11 pagesHybrid Block Diagonalization For Massive Multiuser MIMO SystemsAhmet Sacit SümerNo ratings yet
- Harvesting 21-02-17 TwoColumDocument16 pagesHarvesting 21-02-17 TwoColumhendra lamNo ratings yet
- IEEE-Beam Selection For Mmwave Massive MIMO Systems Under Hybrid Transceiver ArchitectureDocument4 pagesIEEE-Beam Selection For Mmwave Massive MIMO Systems Under Hybrid Transceiver Architecturesqiu.commNo ratings yet
- Joint Transceiver and Large Intelligent Surface Design For Massive MIMO MmWave SystemsDocument13 pagesJoint Transceiver and Large Intelligent Surface Design For Massive MIMO MmWave Systemsluuvuduc81No ratings yet
- Reduced Complexity Data-Aided and Code-Aided Frequency Offset Estimation For Flat-Fading MIMO ChannelsDocument10 pagesReduced Complexity Data-Aided and Code-Aided Frequency Offset Estimation For Flat-Fading MIMO ChannelsSandeep SunkariNo ratings yet
- Analyzing Uplink SINR and Rate in Massive MIMO Systems Using Stochastic GeometryDocument15 pagesAnalyzing Uplink SINR and Rate in Massive MIMO Systems Using Stochastic GeometryJackokie ZhaoNo ratings yet
- Single-Carrier Modulation Versus OFDM For Millimeter-Wave Wireless MIMODocument14 pagesSingle-Carrier Modulation Versus OFDM For Millimeter-Wave Wireless MIMOcompluuytthiex hmjjiuyytNo ratings yet
- 7581107-aamDocument15 pages7581107-aamsima.sobhi70No ratings yet
- Digital Predistortion of 5G Multiuser MIMO Transmitters Using Low-Dimensional Feature-Based Model GenerationDocument12 pagesDigital Predistortion of 5G Multiuser MIMO Transmitters Using Low-Dimensional Feature-Based Model GenerationNancyNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document6 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Deep Learning For Massive MIMO: Challenges and Future ProspectsDocument6 pagesDeep Learning For Massive MIMO: Challenges and Future ProspectsgarzuloNo ratings yet
- Low-Power Design For A Digit-Serial Polynomial Basis Finite Field Multiplier Using Factoring TechniqueDocument17 pagesLow-Power Design For A Digit-Serial Polynomial Basis Finite Field Multiplier Using Factoring TechniqueKushal MalhotraNo ratings yet
- Spatially Sparse Precoding in Millimeter Wave MIMO SystemsDocument30 pagesSpatially Sparse Precoding in Millimeter Wave MIMO Systemsanthony uwaechiaNo ratings yet
- Hybrid MIMO Architectures For Millimeter Wave Communications Phase Shifters or SwitchesDocument21 pagesHybrid MIMO Architectures For Millimeter Wave Communications Phase Shifters or Switchesanthony uwaechiaNo ratings yet
- Adaptive OFDM With Index Modulation For Two-Hop Relay-Assisted NetworksDocument14 pagesAdaptive OFDM With Index Modulation For Two-Hop Relay-Assisted NetworksAnonymous Gd16J3n7No ratings yet
- On Massive MIMO Cellular Systems Resilience To Radar InterferenceDocument5 pagesOn Massive MIMO Cellular Systems Resilience To Radar InterferenceAparna MishraNo ratings yet
- OFDM System Identification For Cognitive Radio Based On Pilot Induced CyclostationarityDocument6 pagesOFDM System Identification For Cognitive Radio Based On Pilot Induced Cyclostationaritykhajarasool_skNo ratings yet
- VLSI Implementation of MIMO Detection Using The Sphere Decoding AlgorithmDocument12 pagesVLSI Implementation of MIMO Detection Using The Sphere Decoding AlgorithmQaisar NadeemNo ratings yet
- Virtual Antenna Mapping MIMO Techniques in A Massive MIMO Test-Bed For Backward Compatible LTE Mobile SystemsDocument8 pagesVirtual Antenna Mapping MIMO Techniques in A Massive MIMO Test-Bed For Backward Compatible LTE Mobile SystemsMuhamad RidwanNo ratings yet
- Alternating Optimization Based Hybrid Precoding Strategies For Millimeter Wave MIMO SystemsDocument12 pagesAlternating Optimization Based Hybrid Precoding Strategies For Millimeter Wave MIMO Systemsanthony uwaechiaNo ratings yet
- Computationally Efficient Vector Perturbation Precoding Using Thresholded OptimizationDocument11 pagesComputationally Efficient Vector Perturbation Precoding Using Thresholded OptimizationKarim MoussaNo ratings yet
- Cross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna BeamformingDocument11 pagesCross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna Beamforming이영희No ratings yet
- Mutual Reduction Technique PDFDocument25 pagesMutual Reduction Technique PDFThanh LâmNo ratings yet
- Kalman Filter Models For The Prediction of Individualised Thermal Work StrainDocument17 pagesKalman Filter Models For The Prediction of Individualised Thermal Work Strainhendra lamNo ratings yet
- A Tutorial On Cross-Layer Optimization in Wireless NetworksDocument16 pagesA Tutorial On Cross-Layer Optimization in Wireless Networkshendra lamNo ratings yet
- A Tutorial On Cross-Layer Optimization in Wireless NetworksDocument12 pagesA Tutorial On Cross-Layer Optimization in Wireless Networkshendra lamNo ratings yet
- Shlomi ArnonDocument9 pagesShlomi Arnonhendra lamNo ratings yet
- Sensitivity-Based Adaptive SRUKF For State, Parameter, and Covariance Estimation On Mechatronic SystemsDocument23 pagesSensitivity-Based Adaptive SRUKF For State, Parameter, and Covariance Estimation On Mechatronic Systemshendra lamNo ratings yet
- Coding and Multi-UserDocument35 pagesCoding and Multi-Userhendra lamNo ratings yet
- 1Document33 pages1hendra lamNo ratings yet
- Kalman Filters For Parameter Estimation of Nonstationary SignalsDocument21 pagesKalman Filters For Parameter Estimation of Nonstationary Signalshendra lamNo ratings yet
- Chap 6Document38 pagesChap 6hendra lamNo ratings yet
- Unscented Kalman Filter For State and Parameter Estimation in Vehicle DynamicsDocument23 pagesUnscented Kalman Filter For State and Parameter Estimation in Vehicle Dynamicshendra lamNo ratings yet
- Chap 9Document80 pagesChap 9hendra lamNo ratings yet
- Generalised Pre-Coding Aided Spatial Modulation: Rong Zhang, Lie-Liang Yang and Lajos HanzoDocument10 pagesGeneralised Pre-Coding Aided Spatial Modulation: Rong Zhang, Lie-Liang Yang and Lajos Hanzohendra lamNo ratings yet
- Chap 5Document138 pagesChap 5hendra lamNo ratings yet
- World's Largest Science, Technology & Medicine Open Access Book PublisherDocument23 pagesWorld's Largest Science, Technology & Medicine Open Access Book Publisherhendra lamNo ratings yet
- Chap3 PDFDocument185 pagesChap3 PDFhendra lamNo ratings yet
- Chap 2Document48 pagesChap 2hendra lamNo ratings yet
- Chap 4Document156 pagesChap 4hendra lamNo ratings yet
- Differential Spatial Modulation For High-Rate Transmission SystemsDocument12 pagesDifferential Spatial Modulation For High-Rate Transmission Systemshendra lamNo ratings yet
- Ahn 2017Document4 pagesAhn 2017hendra lamNo ratings yet
- John M. Ciof Department of Electrical Engineering Research Publications Journal PublicationsDocument19 pagesJohn M. Ciof Department of Electrical Engineering Research Publications Journal Publicationshendra lamNo ratings yet
- Wireless Powered Communications With Non-Orthogonal Multiple AccessDocument12 pagesWireless Powered Communications With Non-Orthogonal Multiple Accesshendra lamNo ratings yet
- Outage Performance For Cooperative NOMA Transmission With An AF RelayDocument4 pagesOutage Performance For Cooperative NOMA Transmission With An AF Relayhendra lamNo ratings yet
- Blind Detection For Spatial Modulation Systems Based On ClusteringDocument4 pagesBlind Detection For Spatial Modulation Systems Based On Clusteringhendra lamNo ratings yet
- Chap 1Document110 pagesChap 1hendra lamNo ratings yet
- Precoding-Aided Spatial Modulation With Increased Robustness To Channel CorrelationsDocument4 pagesPrecoding-Aided Spatial Modulation With Increased Robustness To Channel Correlationshendra lamNo ratings yet
- Optimal Design of Non-Orthogonal Multiple Access With Wireless Power TransferDocument6 pagesOptimal Design of Non-Orthogonal Multiple Access With Wireless Power Transferhendra lamNo ratings yet
- Error Performance of Multidimensional Lattice Constellations - Part II: Evaluation Over Fading ChannelsDocument29 pagesError Performance of Multidimensional Lattice Constellations - Part II: Evaluation Over Fading Channelshendra lamNo ratings yet
- (Jabo2) HW Bss 4g Branch Bekasi Cell LVL r4 Discardtimer 20170616Document13 pages(Jabo2) HW Bss 4g Branch Bekasi Cell LVL r4 Discardtimer 20170616hendra lamNo ratings yet
- Carrier Aggregation For Cooperative Cognitive Radio NetworksDocument15 pagesCarrier Aggregation For Cooperative Cognitive Radio Networkshendra lamNo ratings yet
- Power Relayed SystemDocument4 pagesPower Relayed Systemhendra lamNo ratings yet
- M.Com Second Semester – Advanced Cost Accounting MCQDocument11 pagesM.Com Second Semester – Advanced Cost Accounting MCQSagar BangreNo ratings yet
- 21st Century Literary GenresDocument2 pages21st Century Literary GenresGO2. Aldovino Princess G.No ratings yet
- 6 An Indian American Woman in Space 2Document11 pages6 An Indian American Woman in Space 2Manju YadavNo ratings yet
- CAFA Open House HighlightsDocument1 pageCAFA Open House HighlightsDaniel LaiNo ratings yet
- CellphoneBill PDFDocument6 pagesCellphoneBill PDFRaza KhanNo ratings yet
- bk978 1 6817 4068 3ch1Document28 pagesbk978 1 6817 4068 3ch1fysmaNo ratings yet
- Search Engine Marketing Course Material 2t4d9Document165 pagesSearch Engine Marketing Course Material 2t4d9Yoga Guru100% (2)
- Hotel Engineering Facilities: A Case Study of Maintenance PerformanceDocument7 pagesHotel Engineering Facilities: A Case Study of Maintenance PerformanceHoh Pui KeiNo ratings yet
- Twingo 3 & Clio 4Document10 pagesTwingo 3 & Clio 4Alexandre Le GrandNo ratings yet
- Pick Pack Ship Public APIDocument19 pagesPick Pack Ship Public APIgauravpuri198050% (2)
- Rolls-Royce M250 FIRST Network: 2015 Customer Support DirectoryDocument76 pagesRolls-Royce M250 FIRST Network: 2015 Customer Support Directoryale11vigarNo ratings yet
- LTG 04 DD Unit 4 WorksheetsDocument2 pagesLTG 04 DD Unit 4 WorksheetsNguyễn Kim Ngọc Lớp 4DNo ratings yet
- 03 Authority To TravelDocument5 pages03 Authority To TravelDiana Marie Vidallon AmanNo ratings yet
- Constructivism improves a lesson on nounsDocument6 pagesConstructivism improves a lesson on nounsOlaniyi IsaacNo ratings yet
- Covid 19 PDFDocument117 pagesCovid 19 PDFvicky anandNo ratings yet
- Bài Tập Phần Project ManagementDocument11 pagesBài Tập Phần Project ManagementhunfgNo ratings yet
- Reporte Corporativo de Louis Dreyfus Company (LDC)Document21 pagesReporte Corporativo de Louis Dreyfus Company (LDC)OjoPúblico Periodismo de InvestigaciónNo ratings yet
- IBM TS2900 Tape Autoloader RBDocument11 pagesIBM TS2900 Tape Autoloader RBLeonNo ratings yet
- NABARD Dairy Farming Project - PDF - Agriculture - Loans PDFDocument7 pagesNABARD Dairy Farming Project - PDF - Agriculture - Loans PDFshiba prasad panjaNo ratings yet
- Greek Myth WebquestDocument9 pagesGreek Myth Webquesthollyhock27No ratings yet
- MINTZBERGDocument32 pagesMINTZBERGgeezee10004464100% (2)
- EBSD Specimen Prep PaperDocument36 pagesEBSD Specimen Prep PaperPaul RosiahNo ratings yet
- INSYS - EBW Serie EbookDocument4 pagesINSYS - EBW Serie EbookJorge_Andril_5370No ratings yet
- GMS175CSDocument4 pagesGMS175CScorsini999No ratings yet
- A Review of The Management of Cerebral Vasospasm After Aneurysmal Subarachnoid HemorrhageDocument15 pagesA Review of The Management of Cerebral Vasospasm After Aneurysmal Subarachnoid HemorrhageAlanNo ratings yet
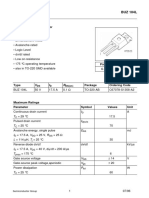
- Sipmos Power Transistor: BUZ 104LDocument10 pagesSipmos Power Transistor: BUZ 104LAlexsander MeloNo ratings yet
- Classical Fields 2Document2 pagesClassical Fields 2Jonathan SanchezNo ratings yet
- HEC-HMS Tutorials and Guides-V3-20210529 - 140315Document756 pagesHEC-HMS Tutorials and Guides-V3-20210529 - 140315Ervin PumaNo ratings yet
- 3 Manacsa&Tan 2012 Strong Republic SidetrackedDocument41 pages3 Manacsa&Tan 2012 Strong Republic SidetrackedGil Osila JaradalNo ratings yet
- Huang V Tesla State of Calif 20190430Document20 pagesHuang V Tesla State of Calif 20190430jonathan_skillings100% (1)