You might also like
- La Maquina Generalizada de Anillos RozantesDocument14 pagesLa Maquina Generalizada de Anillos RozantesRoly Pariona SilvaNo ratings yet
- GENERADORES SÍNCRONOS: DETERMINACIÓN DE TENSIONES, CORRIENTES Y DATOS DE FUNCIONAMIENTODocument1 pageGENERADORES SÍNCRONOS: DETERMINACIÓN DE TENSIONES, CORRIENTES Y DATOS DE FUNCIONAMIENTOFher Verástegui100% (1)
- Evolución de la industria eléctrica en el Perú desde sus inicios hasta la reforma del sectorDocument7 pagesEvolución de la industria eléctrica en el Perú desde sus inicios hasta la reforma del sectorWalter TocraNo ratings yet
- Influencia Del Factor de Potencia en La Lectura de Un Vatímetro - Previo 01Document5 pagesInfluencia Del Factor de Potencia en La Lectura de Un Vatímetro - Previo 01Gustavo Gomez100% (1)
- Semana 09Document38 pagesSemana 09Alex PANo ratings yet
- PC1 - Ramirez Carranza Jhuñor JDocument4 pagesPC1 - Ramirez Carranza Jhuñor JJhunior Jhonatan Ramírez CarranzaNo ratings yet
- Clasificacion de Instalaciones EléctricasDocument10 pagesClasificacion de Instalaciones EléctricasKevin Soraluz FaríasNo ratings yet
- PolifasicosDocument44 pagesPolifasicoscamilosena100% (3)
- Guias Circuitos Electricos 1Document38 pagesGuias Circuitos Electricos 1Renzo Carrion Fernandez BacaNo ratings yet
- Transformadores Monofásicos ParaleloDocument7 pagesTransformadores Monofásicos ParaleloJacobChavezNo ratings yet
- ErroresDocument13 pagesErroresELISBAN CHILLITUPA SEGOVIANo ratings yet
- Apuntes máquinas eléctricas UNI-FIEE fuerza magnetomotrizDocument36 pagesApuntes máquinas eléctricas UNI-FIEE fuerza magnetomotrizfrank garciaNo ratings yet
- INFORME-015-2020-ELPU-SE-PUT-SSE - Rest. Linea 8002 (R)Document8 pagesINFORME-015-2020-ELPU-SE-PUT-SSE - Rest. Linea 8002 (R)Ebis100% (1)
- Circuitos Electricos Acoplados MagneticamenteDocument41 pagesCircuitos Electricos Acoplados MagneticamenteEdward MedinaNo ratings yet
- Practica Calificada N°1 2020-1Document2 pagesPractica Calificada N°1 2020-1Jorge Luis Espinoza Bardales100% (1)
- Transformaciones de Fase y de ConmutaciónDocument8 pagesTransformaciones de Fase y de ConmutaciónLuis Picon LoliNo ratings yet
- Generador síncrono características de vacío y bajo cargaDocument7 pagesGenerador síncrono características de vacío y bajo cargaDAVID SANTOS ALVARONo ratings yet
- Formacion de Campos MagneticosDocument3 pagesFormacion de Campos MagneticoscristianNo ratings yet
- Diagrama Circular Utilizando MatlabDocument8 pagesDiagrama Circular Utilizando MatlabhhzavanaNo ratings yet
- Ángulo de desfase de ondas senoidales en circuitos R, L y CDocument10 pagesÁngulo de desfase de ondas senoidales en circuitos R, L y CJorge Arturo Medina GutierrezNo ratings yet
- Empleo de Diodos Como Rec de C ModificadoDocument9 pagesEmpleo de Diodos Como Rec de C Modificadoherkike01No ratings yet
- 2-Analisis de FallasDocument59 pages2-Analisis de FallasAlejandra LópezNo ratings yet
- Generador Sincrono II Informe FinalDocument6 pagesGenerador Sincrono II Informe FinaljimyNo ratings yet
- GUIA DE EJERCICIOS DE Estabilidad Transitoria PDFDocument2 pagesGUIA DE EJERCICIOS DE Estabilidad Transitoria PDFAlejandro Alvarez SaavedraNo ratings yet
- Arrollamiento para máquinas rotativas de corriente alternaDocument5 pagesArrollamiento para máquinas rotativas de corriente alternaCarlosRojasDelgadoNo ratings yet
- Problemario 1 Onda Viajera 2Document2 pagesProblemario 1 Onda Viajera 2Emmanuel PugaNo ratings yet
- Distribución de Tensión en Cadenas de AisladoresDocument3 pagesDistribución de Tensión en Cadenas de AisladoresmartinmejiasolanoNo ratings yet
- Laboratoriode Maquinas Electricas 1 - 2Document13 pagesLaboratoriode Maquinas Electricas 1 - 2JesusVilcaYepezNo ratings yet
- Estudio de Los Efectos de Las Descargas Atmosféricas Sobre La Confiabilidad de Las Líneas Aéreas de Transporte de EnergíaDocument28 pagesEstudio de Los Efectos de Las Descargas Atmosféricas Sobre La Confiabilidad de Las Líneas Aéreas de Transporte de EnergíamarcosNo ratings yet
- Prncipio y Análisis Del Generador SíncronoDocument14 pagesPrncipio y Análisis Del Generador SíncronoEnrique GomezNo ratings yet
- Acopladores MaquinasDocument9 pagesAcopladores MaquinasHector ValdiviaNo ratings yet
- Parametros de TensadoDocument9 pagesParametros de TensadoJesus BellosoNo ratings yet
- Unidad 5 Transformadores.Document6 pagesUnidad 5 Transformadores.Miguel Aparicio HernándezNo ratings yet
- Frecuencia Industrial 8.1Document4 pagesFrecuencia Industrial 8.1Dieguito FernandoNo ratings yet
- Trabajo Domiciliario de Medidas Electricas 2018 BDocument3 pagesTrabajo Domiciliario de Medidas Electricas 2018 BalexanderNo ratings yet
- Inffina 2Document4 pagesInffina 2Deyvis CadillopNo ratings yet
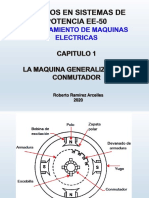
- Capitulo 1Document118 pagesCapitulo 1william.123No ratings yet
- Solucionario 4ta Práctica Calificada EE210 N Ciclo 2020-2Document5 pagesSolucionario 4ta Práctica Calificada EE210 N Ciclo 2020-2Diego Salazar UrbinaNo ratings yet
- Transformacion de Tension y CorrienteDocument5 pagesTransformacion de Tension y Corrienteangelica villaloboNo ratings yet
- Maquinas Electricas Ii EE-214M: I I I N 1800 RPMDocument3 pagesMaquinas Electricas Ii EE-214M: I I I N 1800 RPMJossue OlivaresNo ratings yet
- Laboratorio de Circuitos Electricos 2 - Circuitos Trifasicos BalanceadosDocument48 pagesLaboratorio de Circuitos Electricos 2 - Circuitos Trifasicos BalanceadosLorena ChevezNo ratings yet
- PotenciasDocument1 pagePotenciasTheHackerNo ratings yet
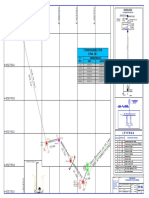
- Plano de Red Primaria Replanteo-Presentación1Document1 pagePlano de Red Primaria Replanteo-Presentación1Guido M-qNo ratings yet
- Efecto JouleDocument3 pagesEfecto JouleSCORER STRIKERZNo ratings yet
- Ecuaciones de CarsonDocument6 pagesEcuaciones de CarsonOscar ChocNo ratings yet
- Informe Previo Nro4 MAQUI2Document7 pagesInforme Previo Nro4 MAQUI2Hernando Cruz ANo ratings yet
- Informe Final 3Document15 pagesInforme Final 3Jacob Chávez CossioNo ratings yet
- Operación de Transformadores Monofásicos en ParaleloDocument6 pagesOperación de Transformadores Monofásicos en ParaleloHernan LagosNo ratings yet
- Medición resistividad terreno y resistencia puesta tierra laboratorio metrologíaDocument7 pagesMedición resistividad terreno y resistencia puesta tierra laboratorio metrologíaBit ClodeNo ratings yet
- Campo TransversalDocument10 pagesCampo TransversalJuan Carlos CaballeroNo ratings yet
- Guía de PracticaDocument6 pagesGuía de PracticaBryan MonteroNo ratings yet
- ALTA TENSION Introduccion Campos ElectricosDocument72 pagesALTA TENSION Introduccion Campos ElectricosWashington Omar Jr.No ratings yet
- 1 Maq. Electr.i - Cap. I (2019-Ii)Document25 pages1 Maq. Electr.i - Cap. I (2019-Ii)cristianNo ratings yet
- Maquinas Electricas IDocument24 pagesMaquinas Electricas IAndréVelazcoNo ratings yet
- Tema 1.1 Materiales MagneticosDocument22 pagesTema 1.1 Materiales Magneticossumer renzo apaico anchanteNo ratings yet
- Capitulo II Maquinas Electricas Estaticas 2022 1Document17 pagesCapitulo II Maquinas Electricas Estaticas 2022 1luisNo ratings yet
- Facultad de Ingeniería Mecánica DOCENTE: Lic. Luis E. Alfaro García CURSO: Laboratorio de Máquinas Eléctricas TEMA: Curva de Magnetización AlumnosDocument8 pagesFacultad de Ingeniería Mecánica DOCENTE: Lic. Luis E. Alfaro García CURSO: Laboratorio de Máquinas Eléctricas TEMA: Curva de Magnetización AlumnosPEDRO ARMANDO VALDIVIESO ALCALDENo ratings yet
- Antenas verticales para bajas frecuencias: (MF y HF)From EverandAntenas verticales para bajas frecuencias: (MF y HF)No ratings yet
- Informe No.0080 2010 GART PDFDocument247 pagesInforme No.0080 2010 GART PDFLeonardo Rolando A. LizarbeNo ratings yet
- Diseno de Una Faja TransportadoraDocument15 pagesDiseno de Una Faja TransportadoraLeonardo Rolando A. LizarbeNo ratings yet
- Cuestionario 2Document9 pagesCuestionario 2Leonardo Rolando A. LizarbeNo ratings yet
- Proyecto de Esparragos AseguirDocument71 pagesProyecto de Esparragos AseguirLeonardo Rolando A. LizarbeNo ratings yet
- Paper GasDocument10 pagesPaper GasLeonardo Rolando A. LizarbeNo ratings yet
- Tópicos 1-19-2Document46 pagesTópicos 1-19-2Jaime Cristo Mascco CastroNo ratings yet
- Resumen de TermoelectricasDocument1 pageResumen de TermoelectricasLeonardo Rolando A. LizarbeNo ratings yet
- SoldaduraDocument18 pagesSoldaduraLeonardo Rolando A. LizarbeNo ratings yet
- Paper GasDocument10 pagesPaper GasLeonardo Rolando A. LizarbeNo ratings yet
- Cuestionario 1Document5 pagesCuestionario 1Leonardo Rolando A. LizarbeNo ratings yet
- Cuestionario 1Document5 pagesCuestionario 1Leonardo Rolando A. LizarbeNo ratings yet
- Cuestionario 2Document9 pagesCuestionario 2Leonardo Rolando A. LizarbeNo ratings yet
- Cuestionario 1Document5 pagesCuestionario 1Leonardo Rolando A. LizarbeNo ratings yet
- CT 1-19-2 AbDocument30 pagesCT 1-19-2 AbJeremy Gutierrez MendozaNo ratings yet
- ILUMINACIONDocument10 pagesILUMINACIONLeonardo Rolando A. LizarbeNo ratings yet
- Fajas PachecoDocument11 pagesFajas PachecoLeonardo Rolando A. LizarbeNo ratings yet
- Diseño de equipos de transporte de materialesDocument5 pagesDiseño de equipos de transporte de materialesLeonardo Rolando A. LizarbeNo ratings yet
- Diseño de equipos de transporte de materialesDocument5 pagesDiseño de equipos de transporte de materialesLeonardo Rolando A. LizarbeNo ratings yet
- Valuación Tarifaria.Document65 pagesValuación Tarifaria.JonathanPeraltaRamosNo ratings yet
- Ejemplo Diseño de PERNOSDocument3 pagesEjemplo Diseño de PERNOSLeonardo Rolando A. LizarbeNo ratings yet
- TransformadoresDocument21 pagesTransformadoresLeonardo Rolando A. LizarbeNo ratings yet
- Transform Ad orDocument20 pagesTransform Ad orLeonardo Rolando A. LizarbeNo ratings yet
- Selección de CalderasDocument9 pagesSelección de CalderasLeonardo Rolando A. LizarbeNo ratings yet
- Motor GasolineroDocument2 pagesMotor GasolineroLeonardo Rolando A. LizarbeNo ratings yet
- Tecnología Del Gas Natural: Mag. Ing. Wilmer Jara Velásquez Sesión 5Document25 pagesTecnología Del Gas Natural: Mag. Ing. Wilmer Jara Velásquez Sesión 5Leonardo Rolando A. LizarbeNo ratings yet
- Caldera de vapor: Balance térmico y eficienciaDocument9 pagesCaldera de vapor: Balance térmico y eficienciaLeonardo Rolando A. LizarbeNo ratings yet
- MoralitoDocument1 pageMoralitoLeonardo Rolando A. LizarbeNo ratings yet
- Trabajo de MoralesDocument10 pagesTrabajo de MoralesLeonardo Rolando A. LizarbeNo ratings yet
- Asignatura Gestión EmpresarialDocument61 pagesAsignatura Gestión EmpresarialLeonardo Rolando A. LizarbeNo ratings yet
- 2do InformeDocument25 pages2do InformeKimberly RojasNo ratings yet
- Invernaderos MeridaDocument10 pagesInvernaderos MeridaJosé Luis RomeroNo ratings yet
- Ensayo Bloques de MotoresDocument3 pagesEnsayo Bloques de MotoresLauraHernandezNo ratings yet
- Célula como unidad estructural y funcional de la vidaDocument16 pagesCélula como unidad estructural y funcional de la vidasegg_mnNo ratings yet
- Ruptura de La ViscosidadDocument2 pagesRuptura de La ViscosidadJose VillalvaNo ratings yet
- Carpinteria MetalicaDocument10 pagesCarpinteria MetalicaEfrain Sotelo BuatistaNo ratings yet
- Cemento Blanco. PDFDocument2 pagesCemento Blanco. PDFAbrahan Eriquita MamaniNo ratings yet
- Investigacion Centrales TermicasDocument7 pagesInvestigacion Centrales TermicasSamuel DiazNo ratings yet
- Genética molecular: procesos básicosDocument142 pagesGenética molecular: procesos básicosFlor D'Arcangelo0% (1)
- SEMINARIO 3 Cinética Química, Equilibrio Químico y Equilibrio Acido Base 123 ADocument12 pagesSEMINARIO 3 Cinética Química, Equilibrio Químico y Equilibrio Acido Base 123 ASandra CordovaNo ratings yet
- Curso Operador de Calderas IndustrialesDocument5 pagesCurso Operador de Calderas IndustrialesVictor PerezNo ratings yet
- 2.1 Definicion de MetabolismoDocument1 page2.1 Definicion de MetabolismoJade Irem VelazquezNo ratings yet
- Proteccion Del Complejo Dentinopulpar PDFDocument81 pagesProteccion Del Complejo Dentinopulpar PDFSaul Vega Espinoza100% (2)
- Sesión 10Document7 pagesSesión 10Alexandra Andrea Villafuerte huaracayaNo ratings yet
- Practica 1 PDFDocument10 pagesPractica 1 PDFlucaNo ratings yet
- Guia de Quimica Clei 5 - Acidos y BasesDocument4 pagesGuia de Quimica Clei 5 - Acidos y BasesYadira Valancia AlvarezNo ratings yet
- Natal Branco PARTITURA 3Document4 pagesNatal Branco PARTITURA 3Cadu BarcelosNo ratings yet
- Cat 2002C1 PDFDocument71 pagesCat 2002C1 PDFCezar PajaresNo ratings yet
- Fluidos 3Document14 pagesFluidos 3Fito MenaNo ratings yet
- Aspers orDocument16 pagesAspers orLuisNovoaRiveraNo ratings yet
- Pañales ecológicos: Guía completa sobre pañales de telaDocument17 pagesPañales ecológicos: Guía completa sobre pañales de telaPaula BrunengoNo ratings yet
- Extracción Del ADNDocument2 pagesExtracción Del ADNMariano García Castillo43% (7)
- Semana 05 - Segunda Ley Termodinamica 2018-1Document59 pagesSemana 05 - Segunda Ley Termodinamica 2018-1Edgar Santillan TrigosoNo ratings yet
- Diuresis: Factores que modifican la eliminación de agua por el riñónDocument11 pagesDiuresis: Factores que modifican la eliminación de agua por el riñónGabriel OtaNo ratings yet
- Especificación TécnicaDocument142 pagesEspecificación TécnicaJORGE HUARAYANo ratings yet
- Enlaces Quimicos P2Document7 pagesEnlaces Quimicos P2Karla GonzálezNo ratings yet
- Terminacion Cervical y Tipos de CoronasDocument24 pagesTerminacion Cervical y Tipos de CoronasJuan Martin Fierro Aquinto86% (7)
- Pop CompletoDocument178 pagesPop CompletoJessy M Reyes100% (1)
- Ciencias Y Tecnología. Química: Segundo TrimestreDocument42 pagesCiencias Y Tecnología. Química: Segundo TrimestreKarina Gomez100% (1)
- Tincion SimpleDocument1 pageTincion Simplezynnon79% (19)