0% found this document useful (0 votes)
246 views2 pagesVignan'S Lara Institute of Engineering and Technology: Power Semiconductor Drives - PART A
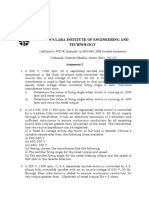
The document outlines the topics to be covered in each unit of the course "Power semiconductor drives – PART A". The 6 units cover various aspects of electrical drives including components of load torques, DC drives, AC drives using induction motors, synchronous motors, and control techniques. Some of the key topics listed are constant torque and constant power drives, speed control of DC motors, V/F control of induction motors, rotor resistance control, and true synchronous versus self-control modes of synchronous motors.
Uploaded by
Venkat ManiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
246 views2 pagesVignan'S Lara Institute of Engineering and Technology: Power Semiconductor Drives - PART A
The document outlines the topics to be covered in each unit of the course "Power semiconductor drives – PART A". The 6 units cover various aspects of electrical drives including components of load torques, DC drives, AC drives using induction motors, synchronous motors, and control techniques. Some of the key topics listed are constant torque and constant power drives, speed control of DC motors, V/F control of induction motors, rotor resistance control, and true synchronous versus self-control modes of synchronous motors.
Uploaded by
Venkat ManiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 2