You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Recruitment of Sales Executives TLs ASM Processing Staff BFSLDocument6 pagesRecruitment of Sales Executives TLs ASM Processing Staff BFSLTopRankersNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Course Objectives & Outcomes Undergraduate Program in Mechanical Engineering (ME) School of Engineering, College of Science & EngineeringDocument1 pageCourse Objectives & Outcomes Undergraduate Program in Mechanical Engineering (ME) School of Engineering, College of Science & Engineeringkannanmech87No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Sel CV I Ae Agri 2k17 ListDocument2 pagesSel CV I Ae Agri 2k17 Listkannanmech87No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- AutoCAD 2013Document264 pagesAutoCAD 2013panosscribd100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Valla DuraiDocument2 pagesValla Duraikannanmech87No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- TNPSC GKDocument415 pagesTNPSC GKkannanmech87100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Alternative Fuels & Bio - FuelsDocument8 pagesAlternative Fuels & Bio - Fuelskannanmech87No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Nano TechnologyDocument10 pagesNano Technologykannanmech87100% (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- இருப்பிட சான்றிதழுக்கான விண்ணப்பபடிவம்Document1 pageஇருப்பிட சான்றிதழுக்கான விண்ணப்பபடிவம்Bakrudeen Ali Ahamed0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Dept May2011gfDocument506 pagesDept May2011gfkannanmech87No ratings yet
- பட்டா மாற்றத்திற்கான விண்ணப்படிவம்Document3 pagesபட்டா மாற்றத்திற்கான விண்ணப்படிவம்Bakrudeen Ali AhamedNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- KSR Institute For Engineering and Technology Department of Mechanical Engineering Mentoring Data SheetDocument2 pagesKSR Institute For Engineering and Technology Department of Mechanical Engineering Mentoring Data Sheetkannanmech87No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- NEW507179சூலை 2012 மாத இதழ்Document26 pagesNEW507179சூலை 2012 மாத இதழ்David MayNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- குடும்ப அட்டை பெறுவதற்கான விண்ணப்ப படிவம்Document2 pagesகுடும்ப அட்டை பெறுவதற்கான விண்ணப்ப படிவம்Bakrudeen Ali AhamedNo ratings yet
- ST Forest Dwellers Act 2006 T 0Document3 pagesST Forest Dwellers Act 2006 T 0kannanmech87No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
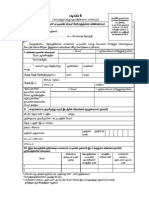
- Form 6 TamilDocument7 pagesForm 6 Tamilapi-276452640No ratings yet
- Model TestDocument21 pagesModel Testanand_dec84No ratings yet
- Form 8 AtamilDocument3 pagesForm 8 AtamilVijayabaskaran SundhareshwarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- TNPSC Model TamilDocument22 pagesTNPSC Model Tamilபிரகாஷ் பாரிNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- TNPSC Group 4 Model Question Paper 2Document20 pagesTNPSC Group 4 Model Question Paper 2training2jobs100% (1)
- Answer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)Document1 pageAnswer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)kannanmech87No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Fiscal Responsibility ActDocument9 pagesFiscal Responsibility Actkannanmech87No ratings yet
- TNPSC Group 2 Model Question and AnswerDocument20 pagesTNPSC Group 2 Model Question and Answeruit@No ratings yet
- Dom QBDocument8 pagesDom QBkannanmech87No ratings yet
- Jarme 3 1 2010Document8 pagesJarme 3 1 2010kannanmech87No ratings yet
- Answer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)Document1 pageAnswer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)kannanmech87No ratings yet
- PhysResInt 10 341016Document10 pagesPhysResInt 10 341016kannanmech87No ratings yet
- RBI & IMF CompensationDocument3 pagesRBI & IMF Compensationkannanmech87No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Validation of A Vapour Compression Refrigeration System Design ModelDocument7 pagesValidation of A Vapour Compression Refrigeration System Design Modelkannanmech87No ratings yet
- Validation of A Vapour Compression Refrigeration System Design ModelDocument7 pagesValidation of A Vapour Compression Refrigeration System Design Modelkannanmech87No ratings yet
- SXXa XSDocument5 pagesSXXa XSraviteja tankalaNo ratings yet
- Penetration TestDocument5 pagesPenetration TestU Mad BRoNo ratings yet
- Ch09 TestbankDocument61 pagesCh09 Testbanklimpaj35No ratings yet
- Philosophy of Quantum Mechanics For EveryoneDocument14 pagesPhilosophy of Quantum Mechanics For Everyonelo laNo ratings yet
- Experiment 5Document6 pagesExperiment 5Vinicius GuimarãesNo ratings yet
- PracticeTest1 SolutionsDocument10 pagesPracticeTest1 SolutionsMar Lorenz Robles LingaoNo ratings yet
- KOM Expt. No. 2Document5 pagesKOM Expt. No. 2Vatsal PatelNo ratings yet
- Torque On A CoilDocument24 pagesTorque On A CoiledithNo ratings yet
- Tesla 09Document41 pagesTesla 09William NormanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Paper Hanoi Metro ToSEAGS-AGSSEA VDDDocument7 pagesPaper Hanoi Metro ToSEAGS-AGSSEA VDDIngrid Irreño PalomoNo ratings yet
- Intro Hardness PDFDocument2 pagesIntro Hardness PDFCali Tamagnini100% (1)
- Lecture 3 - Chapter 3 (Modeling in The Time Domain)Document57 pagesLecture 3 - Chapter 3 (Modeling in The Time Domain)Jessiedee Mark GingoNo ratings yet
- FR408 High Performance Laminate and Prepreg Data SheetDocument2 pagesFR408 High Performance Laminate and Prepreg Data SheetAhmad UsmanNo ratings yet
- TEM 02 Swivel JointsDocument102 pagesTEM 02 Swivel JointsOctavian Sarbu100% (2)
- Free Vibration With DampingDocument31 pagesFree Vibration With Dampingriya pradhanNo ratings yet
- 53206-mt - Computational Fluid DynamicsDocument2 pages53206-mt - Computational Fluid DynamicsSRINIVASA RAO GANTANo ratings yet
- SKF 925 Catalogue Bearing PDFDocument30 pagesSKF 925 Catalogue Bearing PDFIrfan Aditya Dharma100% (1)
- DS - en 1993-1-3 DK Na - 2007 eDocument6 pagesDS - en 1993-1-3 DK Na - 2007 ep_meulendijks108No ratings yet
- Indian Standard: Ceramic Tiles - Methods of Test, Sampl G and Basis For AcceptanceDocument47 pagesIndian Standard: Ceramic Tiles - Methods of Test, Sampl G and Basis For AcceptanceUppala Krishna ChaitanyaNo ratings yet
- HTTP Tutorial Math Lamar Edu Classes Alg PolynomialFunctions AspxDocument1 pageHTTP Tutorial Math Lamar Edu Classes Alg PolynomialFunctions AspxAkash TutiNo ratings yet
- Drying Shrinkage C596.22657 PDFDocument4 pagesDrying Shrinkage C596.22657 PDFSARAH ABRAHAM0% (1)
- Finite Element Method PDFDocument43 pagesFinite Element Method PDFAdetiyo Burhanudin HakimNo ratings yet
- Laws of Motion MCQs Sheet 1Document6 pagesLaws of Motion MCQs Sheet 1eka123100% (1)
- Andhrapradesh IPE SR Inter Model PapersDocument2 pagesAndhrapradesh IPE SR Inter Model PaperspolamrajuNo ratings yet
- Samlerapport DeepWind 2013Document274 pagesSamlerapport DeepWind 2013jormaeherNo ratings yet
- Lecture On Vehicle Dynamics 1 PDFDocument10 pagesLecture On Vehicle Dynamics 1 PDFSuryo mubarokNo ratings yet
- AIChE - Integrate Compressor Performance Maps Into Process SimulationDocument6 pagesAIChE - Integrate Compressor Performance Maps Into Process SimulationMuhammad ImranNo ratings yet
- Module 3: Mass Transfer Coefficients: Lecture No. 5Document3 pagesModule 3: Mass Transfer Coefficients: Lecture No. 5walisyhNo ratings yet
- 1006 1009Document4 pages1006 1009SinhrooNo ratings yet
- Von Karman Collection GuideDocument130 pagesVon Karman Collection GuideKitana Hananda SuhattaNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldFrom EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldRating: 4 out of 5 stars4/5 (595)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 5 out of 5 stars5/5 (5)