You might also like
- Electronics: Improving RF Fingerprinting Methods by Means of D2D Communication ProtocolDocument20 pagesElectronics: Improving RF Fingerprinting Methods by Means of D2D Communication ProtocoltamernadeemNo ratings yet
- 5G VS Wi-Fi Indoor Positioning: A Comparative StudyDocument9 pages5G VS Wi-Fi Indoor Positioning: A Comparative StudyijcsesNo ratings yet
- Sensors: Improved Bluetooth Low Energy Sensor Detection For Indoor Localization ServicesDocument27 pagesSensors: Improved Bluetooth Low Energy Sensor Detection For Indoor Localization ServicesHUGO PINHEIRO DA SILVANo ratings yet
- Satellite and Terrestrial Radio Positioning Techniques: A Signal Processing PerspectiveFrom EverandSatellite and Terrestrial Radio Positioning Techniques: A Signal Processing PerspectiveRating: 5 out of 5 stars5/5 (1)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Zhuang Et Al. - 2018 - A Survey of Positioning Systems Using Visible LED LightsDocument26 pagesZhuang Et Al. - 2018 - A Survey of Positioning Systems Using Visible LED LightsJuan Esteban Moreno VeraNo ratings yet
- Bluetooth-Wifi Based Combined Positioning Algorithm, Implementation and Experimental EvaluationDocument9 pagesBluetooth-Wifi Based Combined Positioning Algorithm, Implementation and Experimental EvaluationIbrahimNo ratings yet
- Bluetooth Positioning Using RSSI and Triangulation Methods: January 2013Document7 pagesBluetooth Positioning Using RSSI and Triangulation Methods: January 2013Aldo AriakusumahNo ratings yet
- Coverage Awareness of 5G NetworksDocument3 pagesCoverage Awareness of 5G NetworksTemmNo ratings yet
- Communication Technologies and Their Applications Beyond CommunicationDocument12 pagesCommunication Technologies and Their Applications Beyond CommunicationgambexNo ratings yet
- Implementing Positioning Services Over An Ubiquitous InfrastructureDocument6 pagesImplementing Positioning Services Over An Ubiquitous Infrastructureramnag4No ratings yet
- Wireless TransmissionsDocument42 pagesWireless Transmissionsrafacien.rcNo ratings yet
- SAE and the Evolved Packet Core: Driving the Mobile Broadband RevolutionFrom EverandSAE and the Evolved Packet Core: Driving the Mobile Broadband RevolutionRating: 3 out of 5 stars3/5 (2)
- Progress in Electromagnetics Research, Vol. 139, 445-478, 2013Document34 pagesProgress in Electromagnetics Research, Vol. 139, 445-478, 2013Tolegen MussaliNo ratings yet
- Ieee Research Paper On Satellite CommunicationDocument6 pagesIeee Research Paper On Satellite Communicationafmcuvkjz100% (1)
- Long-Distance Wireless Networking For Site - Office Data CommunicationsDocument14 pagesLong-Distance Wireless Networking For Site - Office Data CommunicationsRoshdy AbdelRassoulNo ratings yet
- Sensing Complex Environments With Localization RequirementsDocument1 pageSensing Complex Environments With Localization RequirementsSemana da Escola de Engenharia da Universidade do MinhoNo ratings yet
- Sensors: A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless TechnologiesDocument32 pagesSensors: A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless TechnologiesNgala MacNo ratings yet
- Indoor Positioning of Shoppers Using A Network of Bluetooth Low Energy BeaconsDocument8 pagesIndoor Positioning of Shoppers Using A Network of Bluetooth Low Energy Beacons19euec020 AR C ArunachalamNo ratings yet
- Smart Sensing in Geotechnical Engineering: International Journal of Advance Engineering and Research DevelopmentDocument3 pagesSmart Sensing in Geotechnical Engineering: International Journal of Advance Engineering and Research DevelopmentAlex Atanaw AlebachewNo ratings yet
- Project Phylaws Final Report: Ref. Ares (2017) 3328762 - 03/07/2017Document32 pagesProject Phylaws Final Report: Ref. Ares (2017) 3328762 - 03/07/2017Aishu AishuNo ratings yet
- Using Wireless Ethernet For LocalizationDocument6 pagesUsing Wireless Ethernet For Localizationandreluizpsilveira77No ratings yet
- Applied Sciences: Applying Deep Neural Network (DNN) For Robust Indoor Localization in Multi-Building EnvironmentDocument14 pagesApplied Sciences: Applying Deep Neural Network (DNN) For Robust Indoor Localization in Multi-Building Environmentsondv89No ratings yet
- LTE Radio Planning Using Atoll Radio Planning and Optimization SoftwareDocument6 pagesLTE Radio Planning Using Atoll Radio Planning and Optimization SoftwareLinder DuranNo ratings yet
- Uwb Report New 1 RedDocument7 pagesUwb Report New 1 RedGaurav SinhaNo ratings yet
- Full-Duplex Communications for Future Wireless NetworksFrom EverandFull-Duplex Communications for Future Wireless NetworksHirley AlvesNo ratings yet
- Spatial Modulation For Multiple Antenna Communication: November 2016Document28 pagesSpatial Modulation For Multiple Antenna Communication: November 2016ALEXANDRE JOSE FIGUEIREDO LOUREIRONo ratings yet
- A Cognitive Radio Indoor HDTV Multi-Vision System in The TV White SpacesDocument9 pagesA Cognitive Radio Indoor HDTV Multi-Vision System in The TV White SpacesBaskar SingaramNo ratings yet
- 6 1521615698 - 21-03-2018 PDFDocument5 pages6 1521615698 - 21-03-2018 PDFEditor IJRITCCNo ratings yet
- Location Based Services: V. Liutkauskas, D. Matulis, R. PlėštysDocument6 pagesLocation Based Services: V. Liutkauskas, D. Matulis, R. PlėštysJostin PunnasseryNo ratings yet
- Cellular Internet of Things: From Massive Deployments to Critical 5G ApplicationsFrom EverandCellular Internet of Things: From Massive Deployments to Critical 5G ApplicationsNo ratings yet
- LTE-Advanced and Next Generation Wireless Networks: Channel Modelling and PropagationFrom EverandLTE-Advanced and Next Generation Wireless Networks: Channel Modelling and PropagationNo ratings yet
- Radio Frequency and Wireless CommunicationsDocument12 pagesRadio Frequency and Wireless CommunicationsLaxman AryalNo ratings yet
- Path Loss Prediction Models For Corridor Propagation at 24GhzDocument11 pagesPath Loss Prediction Models For Corridor Propagation at 24Ghzgeniot proNo ratings yet
- A Genetic Based Indoor Positioning Algorithm Using Wi-Fi Received Signal Strength and Motion DataDocument19 pagesA Genetic Based Indoor Positioning Algorithm Using Wi-Fi Received Signal Strength and Motion DataIAES IJAINo ratings yet
- EDUCON12 статья вирт лабDocument10 pagesEDUCON12 статья вирт лабaigulk.pochtaNo ratings yet
- Seminar PPT - FinalDocument34 pagesSeminar PPT - FinalDane joseNo ratings yet
- LIDAR-Assisted Channel Modelling For LiFi in Realistic Indoor ScenariosDocument30 pagesLIDAR-Assisted Channel Modelling For LiFi in Realistic Indoor ScenariosApoorva RNo ratings yet
- Bluetooth Indoor Positioning Hack Using Off-the-Shelf BeaconsDocument2 pagesBluetooth Indoor Positioning Hack Using Off-the-Shelf BeaconsgodverkankerNo ratings yet
- Kamugisha Kazaura, Kazuhiko Wakamori, Mitsuji Matsumoto, Takeshi Higashino, Katsutoshi Tsukamoto and Shozo KomakiDocument8 pagesKamugisha Kazaura, Kazuhiko Wakamori, Mitsuji Matsumoto, Takeshi Higashino, Katsutoshi Tsukamoto and Shozo Komakimmlab123No ratings yet
- Front BluetoothDocument8 pagesFront BluetoothBHARAT CHOUDHARYNo ratings yet
- Electronics: Radio Over Fiber: An Alternative Broadband Network Technology For IotDocument8 pagesElectronics: Radio Over Fiber: An Alternative Broadband Network Technology For IotKiều MyNo ratings yet
- Face-to-Face Proximity Estimation Using Bluetooth On SmartphonesDocument13 pagesFace-to-Face Proximity Estimation Using Bluetooth On SmartphonesJoshua MarquezNo ratings yet
- Wireless Communication Research Papers 2012Document8 pagesWireless Communication Research Papers 2012wclochxgf100% (1)
- An Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing IDocument10 pagesAn Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing InugrohoNo ratings yet
- Future Directions in Cognitive Radio Network ResearchDocument40 pagesFuture Directions in Cognitive Radio Network ResearchnwizuNo ratings yet
- Ijrtem E0210031038 PDFDocument8 pagesIjrtem E0210031038 PDFjournalNo ratings yet
- Patient Monitoring Using Bluetooth and Wireless LAN: A ReviewDocument6 pagesPatient Monitoring Using Bluetooth and Wireless LAN: A ReviewJournal of TelecommunicationsNo ratings yet
- Survey of Wireless Indoor Positioning Techniques and SystemsDocument14 pagesSurvey of Wireless Indoor Positioning Techniques and SystemsShouman BaruaNo ratings yet
- A Systematic Review On 5G Mass-IRO-Journals-4 2 3Document12 pagesA Systematic Review On 5G Mass-IRO-Journals-4 2 3Harish MahoreNo ratings yet
- High-Accuracy Localization For Indoor Group Users Based On Extended Kalman FilterDocument11 pagesHigh-Accuracy Localization For Indoor Group Users Based On Extended Kalman Filteraseel jadallahNo ratings yet
- WifflerDocument13 pagesWifflergolla 007No ratings yet
- Cisco Asr1000 Aggregation Routers 2Document23 pagesCisco Asr1000 Aggregation Routers 2golla 007No ratings yet
- PEARL: A Programmable Virtual Router PlatformDocument12 pagesPEARL: A Programmable Virtual Router Platformgolla 007No ratings yet
- RIPE Routing Working Group Recommendations On Route Flap DampingDocument4 pagesRIPE Routing Working Group Recommendations On Route Flap Dampinggolla 007No ratings yet
- BACOLOD ChartsDocument13 pagesBACOLOD ChartsDavid van TeeselingNo ratings yet
- LTE Path LossDocument10 pagesLTE Path LossSingh KamaldeepNo ratings yet
- Amphenol 501020xDocument1 pageAmphenol 501020xnguyentraihdNo ratings yet
- Huawei 3G Introduction PDFDocument64 pagesHuawei 3G Introduction PDFZola BenNo ratings yet
- Proxim Tsunami MP.16 3500 (QuantumWimax - Com)Document2 pagesProxim Tsunami MP.16 3500 (QuantumWimax - Com)Ari Zoldan100% (1)
- RssiDocument4 pagesRssiVikas RanaNo ratings yet
- Data SheetDocument168 pagesData SheetJorge Antonio Rodríguez VargasNo ratings yet
- IONOSPHERIC RADIO WAVE PROPAGATIONDocument111 pagesIONOSPHERIC RADIO WAVE PROPAGATIONEddy Vino100% (1)
- Sinr Rssi & RSRPDocument21 pagesSinr Rssi & RSRPAnonymous VHXJw23L2lNo ratings yet
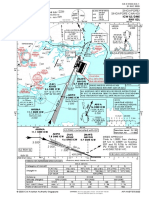
- Instrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDDocument1 pageInstrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDabang fayyadNo ratings yet
- RF and Microwave Engineering Two Mark Questions and AnswersDocument25 pagesRF and Microwave Engineering Two Mark Questions and AnswersDineshNo ratings yet
- Moving Target Indication - Wikipedia, The Free EncyclopediaDocument4 pagesMoving Target Indication - Wikipedia, The Free EncyclopediaMuhammad MohsinNo ratings yet
- RF Circuits, Systems, and Wireless Communications StandardsDocument160 pagesRF Circuits, Systems, and Wireless Communications Standardsdasg2012No ratings yet
- Radar TutorialDocument11 pagesRadar TutorialVinay ChahalNo ratings yet
- CD Stereo System Sistema Estéreo Con Reproductor de Discos Compactos SC-AKX200Document2 pagesCD Stereo System Sistema Estéreo Con Reproductor de Discos Compactos SC-AKX200nishcuaneleNo ratings yet
- RF Drive Test Tutorial Demo VersionDocument32 pagesRF Drive Test Tutorial Demo Versionanupamkhanna100% (5)
- Datasheet Rymsa (Til Teck) - SBTGA 400TVDocument1 pageDatasheet Rymsa (Til Teck) - SBTGA 400TVOscar CanonNo ratings yet
- VoLTE Solution OverviewDocument70 pagesVoLTE Solution OverviewHassan Abd El Fattah100% (1)
- Rena Question Bank Ivth YearDocument3 pagesRena Question Bank Ivth YearKommisetty MurthyrajuNo ratings yet
- Computer Network Lab ManualDocument43 pagesComputer Network Lab ManualktpcoeoNo ratings yet
- MTS716# 2g2u2s2wdp-21 PDFDocument2 pagesMTS716# 2g2u2s2wdp-21 PDFglukkerNo ratings yet
- TRC Check List - v3Document3 pagesTRC Check List - v3Md MinhajNo ratings yet
- Electronics Major Project ListDocument5 pagesElectronics Major Project Listmimossmart26036No ratings yet
- Daily Tests On GMDSS EquipmentDocument8 pagesDaily Tests On GMDSS EquipmentZane AhmedaNo ratings yet
- 148 AlignmentDocument7 pages148 AlignmentEric PskdNo ratings yet
- TDQM 609016 172718DEI 65FT2v02 (7.16) (MTS68)Document1 pageTDQM 609016 172718DEI 65FT2v02 (7.16) (MTS68)vasNo ratings yet
- Gi-Fi Technology Enables Wireless Data Transfer up to 5 Gigabits per SecondDocument20 pagesGi-Fi Technology Enables Wireless Data Transfer up to 5 Gigabits per SecondPrakash SatheNo ratings yet
- Wireless Communication Technology TutorialDocument4 pagesWireless Communication Technology TutoriallinusntnNo ratings yet
- TEMS Investigation 13.0 Technical ReferenceDocument90 pagesTEMS Investigation 13.0 Technical ReferenceTeguh YuliantoNo ratings yet
- Huawei 3D Beamforming (FDD) (eRAN15.1 - Draft A)Document42 pagesHuawei 3D Beamforming (FDD) (eRAN15.1 - Draft A)hasan doganNo ratings yet