You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Architecture of Industrial Automation Systems: Unit-1 ECE361Document20 pagesArchitecture of Industrial Automation Systems: Unit-1 ECE361anuj jainNo ratings yet
- Aircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental MethodsDocument19 pagesAircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental Methodskarthik karunanidhiNo ratings yet
- SHZF - SCR ManualDocument48 pagesSHZF - SCR ManualVADIVEL A.K.No ratings yet
- Servomechanism: Application of Servo MechanismDocument6 pagesServomechanism: Application of Servo MechanismJawad SandhuNo ratings yet
- GS36J06D10-01E - 011 - ExaSMOC GSDocument7 pagesGS36J06D10-01E - 011 - ExaSMOC GSGoogool YNo ratings yet
- Gate 2019 EeDocument5 pagesGate 2019 Eeanwesh qNo ratings yet
- Midterm Exam 1Document8 pagesMidterm Exam 1jagriti kumariNo ratings yet
- Analysis of Missile Control SystemDocument21 pagesAnalysis of Missile Control SystemD.Viswanath100% (2)
- DSP Lecture 12Document24 pagesDSP Lecture 12Muhammad SubhanNo ratings yet
- Introduction SwapnilDocument31 pagesIntroduction SwapnilSWAPNIL MAKHARENo ratings yet
- PID Controller Back UpDocument114 pagesPID Controller Back Upluli_pedrosaNo ratings yet
- Manual Nissan MuranoDocument666 pagesManual Nissan MuranoFelipe Carranza100% (4)
- Process Control: Version 2 EE IIT, Kharagpur 1Document12 pagesProcess Control: Version 2 EE IIT, Kharagpur 1poiuyNo ratings yet
- Adaptive-Fuzzy Logic Control of Robot Manipulators S. Commuri and F.L. LewisDocument6 pagesAdaptive-Fuzzy Logic Control of Robot Manipulators S. Commuri and F.L. LewisNguyễn Thanh TùngNo ratings yet
- Control of Axial Flux Permanent Magnet Motor Using A Hybrid PI/ Fuzzy Logic ControllerDocument8 pagesControl of Axial Flux Permanent Magnet Motor Using A Hybrid PI/ Fuzzy Logic ControllerKein Huat ChuaNo ratings yet
- Burkert - POSITIONERS PDFDocument50 pagesBurkert - POSITIONERS PDFBurkert IndiaNo ratings yet
- Bandpass Filters Using Parallel Coupled Stripline Stepped ImpedaDocument3 pagesBandpass Filters Using Parallel Coupled Stripline Stepped Impedasrividhya ganesanNo ratings yet
- Energies: Sliding-Mode Control of A Charger/Discharger DC/DC Converter For DC-Bus Regulation in Renewable Power SystemsDocument27 pagesEnergies: Sliding-Mode Control of A Charger/Discharger DC/DC Converter For DC-Bus Regulation in Renewable Power SystemsgemejiaNo ratings yet
- Seminar ReportDocument16 pagesSeminar ReportHemraj SonarNo ratings yet
- Cascade LoopDocument6 pagesCascade LoopAhmed EldosokyNo ratings yet
- Ch1 Part 1Document41 pagesCh1 Part 1DanishIshaqNo ratings yet
- Drone Project: Physics 118 - Final ReportDocument13 pagesDrone Project: Physics 118 - Final ReportMahdi MiriNo ratings yet
- ET301 Linear Integrated Circuits and ApplicationsDocument41 pagesET301 Linear Integrated Circuits and ApplicationsChaitanya P V KNo ratings yet
- Project Based Learning IcsDocument14 pagesProject Based Learning IcsAvinash YadavNo ratings yet
- Vc33 Kompend Kap06 eDocument76 pagesVc33 Kompend Kap06 ejosipdianaNo ratings yet
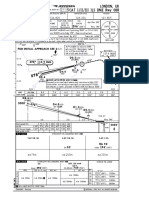
- Egkk Final App Ils 08rDocument1 pageEgkk Final App Ils 08rElton CacefoNo ratings yet
- Robotic Orthosis Lokomat A Rehabilitation and Research ToolDocument8 pagesRobotic Orthosis Lokomat A Rehabilitation and Research ToolGabby RojasNo ratings yet
- Current and Flux Regulation in Field-Weakening OperationDocument9 pagesCurrent and Flux Regulation in Field-Weakening OperationBarbora FaustNo ratings yet