You might also like
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoFrom EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo ratings yet
- MN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1Document33 pagesMN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1Gianny Marcos Fonseca AiresNo ratings yet
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoFrom EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo ratings yet
- MN - 057 - Manual Atuador CSR - M - CSM - Eletrônica Modular - PT - V00 - 0Document33 pagesMN - 057 - Manual Atuador CSR - M - CSM - Eletrônica Modular - PT - V00 - 0Gustavo Rodrigo SantanaNo ratings yet
- Apostila CLP OMRON Avan Ado Rev01 PDFDocument68 pagesApostila CLP OMRON Avan Ado Rev01 PDFdatlogNo ratings yet
- Computação Quântica: Por que é tão difícil explicar o que é a computação quântica?From EverandComputação Quântica: Por que é tão difícil explicar o que é a computação quântica?No ratings yet
- Manual Atuador - Linha CSM SPLITDocument26 pagesManual Atuador - Linha CSM SPLITTarciso Rocha SousaNo ratings yet
- rt420 Manual PTDocument80 pagesrt420 Manual PTFernandoNo ratings yet
- Sysfile108produto28 24012017155143Document33 pagesSysfile108produto28 24012017155143Adelmo FilhoNo ratings yet
- Manual Atuador csr12 25 50 v00 - 0Document27 pagesManual Atuador csr12 25 50 v00 - 0Erick de SouzaNo ratings yet
- Manual de Operação Firenet PLUS PT BRDocument28 pagesManual de Operação Firenet PLUS PT BRDServidoNo ratings yet
- Controlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Document146 pagesControlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Leandro FernandesNo ratings yet
- Robotica Industrial - Universidade de AveiroDocument0 pagesRobotica Industrial - Universidade de AveiroRicardo RodriguesNo ratings yet
- Manual de Instalação E Operação DT16E1-PDocument90 pagesManual de Instalação E Operação DT16E1-PedgarlibanioNo ratings yet
- Manual Do ProdutoDocument44 pagesManual Do ProdutoAlexis MoyaNo ratings yet
- Aurum Manual Hardware v4 6Document53 pagesAurum Manual Hardware v4 6Thiago BoninNo ratings yet
- 2345.10 / 4004.78 Conversor Ethernet / Serial Transparente Ref. 3-0056.110 Manual Rev. 1.10 Agosto/2004Document31 pages2345.10 / 4004.78 Conversor Ethernet / Serial Transparente Ref. 3-0056.110 Manual Rev. 1.10 Agosto/2004stgpereiraNo ratings yet
- Apostila de Acionamentos Elétricos - Módulo II - 075940Document42 pagesApostila de Acionamentos Elétricos - Módulo II - 075940JOAO GABRIEL ULISSES DE MACEDONo ratings yet
- Manual Blocos Funcao Smar FFoundationDocument336 pagesManual Blocos Funcao Smar FFoundationMarcioNo ratings yet
- M4004 - Controlador Programável MPC4004 - Rev2-3 PDFDocument150 pagesM4004 - Controlador Programável MPC4004 - Rev2-3 PDFMarcilio CarlosNo ratings yet
- BEXTRA Manual de Operacao IntegradoraDocument85 pagesBEXTRA Manual de Operacao IntegradoraFredericoPiresDuarteNo ratings yet
- Sistemas de Detecção Arco Elétrico para Painéis de Média Tensão e BaixaDocument42 pagesSistemas de Detecção Arco Elétrico para Painéis de Média Tensão e BaixaandreaugustopsNo ratings yet
- ASCO - Manual de Operação ATB PDFDocument17 pagesASCO - Manual de Operação ATB PDFCarlos Eberhard Diaz TorresNo ratings yet
- Apostila SLC 500Document8 pagesApostila SLC 500Adriano LimaNo ratings yet
- Tecnologia Da Informação: Redes - Parte IDocument138 pagesTecnologia Da Informação: Redes - Parte IYuri Andre GomesNo ratings yet
- TesteDocument106 pagesTesteRafael CintraNo ratings yet
- Barramento Eletrico Blindado P10Document48 pagesBarramento Eletrico Blindado P10marcio100% (1)
- Apostila PDFDocument74 pagesApostila PDFTelma TeixeiraNo ratings yet
- WEG SSW 05 Comunicacao Serial 0899.4894 2.1x Manual Portugues BR PDFDocument41 pagesWEG SSW 05 Comunicacao Serial 0899.4894 2.1x Manual Portugues BR PDFwanderson28No ratings yet
- Manutencao Preventiva em Motores Com o Uso Do Rele de Protecao SEL 710Document5 pagesManutencao Preventiva em Motores Com o Uso Do Rele de Protecao SEL 710fabiobertolinoNo ratings yet
- Apostila Codesys Avancada - 30 - 10 - 2012Document61 pagesApostila Codesys Avancada - 30 - 10 - 2012cristianomtz100% (1)
- Tabela Industry CompletaDocument1,218 pagesTabela Industry CompletaSteve797979No ratings yet
- RGE - Transformador de PotencialDocument20 pagesRGE - Transformador de PotencialBen MartinezNo ratings yet
- MU 9700 Tolbag Pre-Pesagem - 3474454 - RevDocument108 pagesMU 9700 Tolbag Pre-Pesagem - 3474454 - RevDouglas Henrique Santos SouzaNo ratings yet
- Tecnologias de Comunicação de DadosDocument181 pagesTecnologias de Comunicação de DadosNathy=)100% (1)
- Aula 9 Apresentacao Automação Digital SEDocument62 pagesAula 9 Apresentacao Automação Digital SEJOAO VICTOR MENDES MELONo ratings yet
- Datasheet Driver 7.2A NEO DMA860EDocument7 pagesDatasheet Driver 7.2A NEO DMA860EKaio Grupo OXA100% (1)
- WEG SSW900 Manual Do Usuario 10003989114 PTDocument79 pagesWEG SSW900 Manual Do Usuario 10003989114 PTGlauco AmancioNo ratings yet
- Manual de Operação: GPS MD-1020Document33 pagesManual de Operação: GPS MD-1020jorgeNo ratings yet
- Manual SCA05 Serial P3Document37 pagesManual SCA05 Serial P3Carlos_Duque1958No ratings yet
- ACS600Document252 pagesACS600Rodolfo RodriguesNo ratings yet
- TCC Bruno Formatado FinalDocument80 pagesTCC Bruno Formatado FinalMiguel A V FuscoNo ratings yet
- MANUAL TÉCNICO BATERIA ESTACIONÁRIA REGULADA POR VÁLVULA. MONOBLOCOS 6V E12v SÉRIE GPDocument35 pagesMANUAL TÉCNICO BATERIA ESTACIONÁRIA REGULADA POR VÁLVULA. MONOBLOCOS 6V E12v SÉRIE GPJoab Oliveira100% (1)
- Nobreak Sen5000c EngetronDocument3 pagesNobreak Sen5000c Engetronfacmac20080% (1)
- Questionário AutomaçãoDocument10 pagesQuestionário AutomaçãoGuilhermino AfonsoNo ratings yet
- Configurando A Rede ModBus para SLC500Document36 pagesConfigurando A Rede ModBus para SLC500Anderson SabatineNo ratings yet
- Chave de Nivel Capacitiva NC1RDocument15 pagesChave de Nivel Capacitiva NC1REternizados-PelaEstradaNo ratings yet
- Manual Chave Estatica IsoladaDocument8 pagesManual Chave Estatica Isoladareginaldo umbilino silvaNo ratings yet
- Manual Mód. Vidro GLK 2.2IDocument2 pagesManual Mód. Vidro GLK 2.2IGilberto100% (1)
- HCP-W - Acionador Manual em PortuguêsDocument2 pagesHCP-W - Acionador Manual em PortuguêsVictor MoraesNo ratings yet
- Download-303845-Telemetria Do Abastecimento Municipal - Projeto Completo 2019 - 09 - 17-11490344Document133 pagesDownload-303845-Telemetria Do Abastecimento Municipal - Projeto Completo 2019 - 09 - 17-11490344Rafael BonattoNo ratings yet
- WEG Inversor de Frequencia CFW 10 10413080 Catalogo Portugues BRDocument8 pagesWEG Inversor de Frequencia CFW 10 10413080 Catalogo Portugues BREli Marinel Paula SilvaNo ratings yet
- Manual Agora NG Instadm v6.3 PT - Draft (Alsoft) - v3Document43 pagesManual Agora NG Instadm v6.3 PT - Draft (Alsoft) - v3DeathKXNo ratings yet
- Guia de Aplicação de ServoacionamentosDocument126 pagesGuia de Aplicação de ServoacionamentosDanilo Ferreira de SouzaNo ratings yet
- CMDTC2Document28 pagesCMDTC2gbaeta100% (1)
- Manual CTH 2265 PCV PDocument69 pagesManual CTH 2265 PCV PLeonardo ViniciusNo ratings yet
- Bsciv IsisDocument143 pagesBsciv IsisAllan LimaNo ratings yet
- Apostila Acionamentos Industriais 94p Rev 06Document94 pagesApostila Acionamentos Industriais 94p Rev 06giovanne.torresNo ratings yet
- Modelagem ProcessosDocument199 pagesModelagem ProcessosJuliano Deividy B. SantosNo ratings yet
- Docsity Step 7Document33 pagesDocsity Step 7Bruno GiffoniNo ratings yet
- Abordagem Inovadora No Projeto de Controladores PID: U F R G S E E D E Q P P - G E QDocument145 pagesAbordagem Inovadora No Projeto de Controladores PID: U F R G S E E D E Q P P - G E QBruno GiffoniNo ratings yet
- Cba2016 1065Document8 pagesCba2016 1065Bruno GiffoniNo ratings yet
- Bezerra JoseHenrique M PDFDocument86 pagesBezerra JoseHenrique M PDFAllison AmaranteNo ratings yet
- Eletr Pot1 22Document25 pagesEletr Pot1 22Bruno GiffoniNo ratings yet
- 2080 sg001 - PT PDocument64 pages2080 sg001 - PT PBruno GiffoniNo ratings yet
- E3tutorial Developer PTBDocument212 pagesE3tutorial Developer PTBWanderley Terci EstevesNo ratings yet
- Probab Il I DadeDocument154 pagesProbab Il I DadeBruno GiffoniNo ratings yet
- 11.teoria RedesDocument68 pages11.teoria RedesNaomyNo ratings yet
- Apostila Prevenção Combate IncêndiosDocument48 pagesApostila Prevenção Combate IncêndiosEvandro Ricardo100% (1)
- Modelagem ProcessosDocument199 pagesModelagem ProcessosJuliano Deividy B. SantosNo ratings yet
- 3 Motor de InduçãoDocument46 pages3 Motor de Induçãoaas83No ratings yet
- Warley H PereiraDocument44 pagesWarley H PereiraBruno GiffoniNo ratings yet
- 1769 Um021 - PT PDocument330 pages1769 Um021 - PT PBruno GiffoniNo ratings yet
- Eletr Pot1 20 PDFDocument20 pagesEletr Pot1 20 PDFBruno GiffoniNo ratings yet
- 2711p Um006 - PT PDocument190 pages2711p Um006 - PT PBruno GiffoniNo ratings yet
- CT100036Document1 pageCT100036Eder MadrugaNo ratings yet
- Mu 209104Document96 pagesMu 209104Bruno GiffoniNo ratings yet
- 2 Aula SDCDDocument5 pages2 Aula SDCDLourisvan CostaNo ratings yet
- SDCD (Ufpr)Document18 pagesSDCD (Ufpr)MayumiIshiharaNo ratings yet
- Referências Bibliográfic AsDocument24 pagesReferências Bibliográfic AsBruno GiffoniNo ratings yet
- Apostila de Fenomenos Dos TransporteDocument66 pagesApostila de Fenomenos Dos TransportecarlosecivilNo ratings yet
- Control Aula25 26 AvanadoDocument35 pagesControl Aula25 26 AvanadoBruno GiffoniNo ratings yet
- Análise Dos CircuitosDocument1 pageAnálise Dos CircuitosBruno GiffoniNo ratings yet
- Apostila de Exercicios02pdfDocument129 pagesApostila de Exercicios02pdfVitor GSNo ratings yet
- Control NetDocument20 pagesControl NetMarthin Thiago100% (1)
- PROJETO CONCLU - DO - 1 - pg10 PDFDocument1 pagePROJETO CONCLU - DO - 1 - pg10 PDFBruno GiffoniNo ratings yet
- Ticketdirect 1Document3 pagesTicketdirect 1Taylor RobyNo ratings yet
- Balança AnalíticaDocument3 pagesBalança AnalíticasidesioNo ratings yet
- Ebook Cálculo Luminotécnico Método SimplificadoDocument20 pagesEbook Cálculo Luminotécnico Método SimplificadoRui Ferreira100% (1)
- Manual - Main PowerDocument8 pagesManual - Main PowersmftecNo ratings yet
- Nosql Fe01Document2 pagesNosql Fe01danielNo ratings yet
- Manual DiscordDocument8 pagesManual DiscordBruno Guimarães BorgesNo ratings yet
- Assessment de Análise de Dados 1Document17 pagesAssessment de Análise de Dados 1Márcio Martins da Silva100% (2)
- ProfiHub Plus - Data Sheet Rev15-3!0!46Document5 pagesProfiHub Plus - Data Sheet Rev15-3!0!46Thalita Marcondes MagaldiNo ratings yet
- Informática AplicadaDocument108 pagesInformática Aplicadaperito.veritasNo ratings yet
- MODULE 11 - Investigating Email CrimesDocument58 pagesMODULE 11 - Investigating Email CrimesLuiz Henrique Silva SantosNo ratings yet
- Aplicações Física Moderna - Computação QuânticaDocument25 pagesAplicações Física Moderna - Computação QuânticaYan AlefNo ratings yet
- Atalhos Do CorelDrawDocument3 pagesAtalhos Do CorelDrawricardomantovaniNo ratings yet
- Cap03 PortasLógicas e ExpressõesBooleanasDocument25 pagesCap03 PortasLógicas e ExpressõesBooleanasJeronhaNo ratings yet
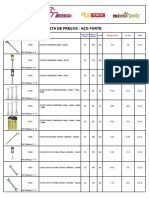
- Aço Forte 02-08Document15 pagesAço Forte 02-08Evandro ColnagoNo ratings yet
- Entradas e Saidas ExplicativoDocument1 pageEntradas e Saidas ExplicativoSirlene IaneNo ratings yet
- Seminário 5G-Conceitos Básicos-V1-Rev3Document88 pagesSeminário 5G-Conceitos Básicos-V1-Rev3Joseph NsongoNo ratings yet
- Monografia IncialDocument6 pagesMonografia IncialRuben Francisco JoseNo ratings yet
- Protocolo DeviceNetDocument30 pagesProtocolo DeviceNetlorentz franklinNo ratings yet
- Semafaros em PascalfcDocument13 pagesSemafaros em PascalfcVanderleia CeruttiNo ratings yet
- Aula 3 - Conceitos BásicosDocument21 pagesAula 3 - Conceitos BásicosLucas SilvaNo ratings yet
- RobertoGodoi-2021 AssociacaoDocument8 pagesRobertoGodoi-2021 AssociacaoRoberto GodoyNo ratings yet
- 60531-354972apostila MatemAtica Financeira Com HP12C Profa. Fabiana Witt EADDocument21 pages60531-354972apostila MatemAtica Financeira Com HP12C Profa. Fabiana Witt EADgabbo FernandesNo ratings yet
- Resolvendo Difuldades Na Conexão Ethernet de Seu AlarmeDocument5 pagesResolvendo Difuldades Na Conexão Ethernet de Seu AlarmeDavidde OBNo ratings yet
- Porta Bombom #DiadascriançasDocument3 pagesPorta Bombom #DiadascriançasClaudia KlugeNo ratings yet
- Prova Monsenhor Gil - PiauíDocument10 pagesProva Monsenhor Gil - PiauíMonize GóisNo ratings yet
- E-Book Introdução Às Tecnologias de Informação e ComunicaçãoDocument174 pagesE-Book Introdução Às Tecnologias de Informação e ComunicaçãoJakson PiedadeNo ratings yet
- S10 - Simulado - Revisão Da TentativaDocument4 pagesS10 - Simulado - Revisão Da TentativaGuilherme RamosNo ratings yet
- Blockchain e A Perspectiva Tecnológica para A Administração PublicaDocument16 pagesBlockchain e A Perspectiva Tecnológica para A Administração PublicaNecoNo ratings yet
- PDFDocument1 pagePDFEvelyn BarbosaNo ratings yet
- Passo A Passo Servidor - PMM - SeiDocument29 pagesPasso A Passo Servidor - PMM - SeiCarolVasconcelosNo ratings yet