You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Clay ScriptDocument13 pagesClay Scriptapi-394679663No ratings yet
- BakenekoDocument2 pagesBakenekoSawyerRankin100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2.2 - All Worksheets - Homework Sheets - Extension SheetsDocument20 pages2.2 - All Worksheets - Homework Sheets - Extension SheetslogineNo ratings yet
- The Per-Unit System Three-Phase Systems: W. H. Kersting New Mexico State UniversityDocument50 pagesThe Per-Unit System Three-Phase Systems: W. H. Kersting New Mexico State UniversityBambang Arie SNo ratings yet
- Live Your Comfortable Moment S: 3 Row Dive-In Seat Spacious 7-SeaterDocument2 pagesLive Your Comfortable Moment S: 3 Row Dive-In Seat Spacious 7-SeaterBambang Arie SNo ratings yet
- Lecture 11 - Power-Flow StudiesDocument14 pagesLecture 11 - Power-Flow StudiesRabbuni GangavarapuNo ratings yet
- LF-Example B1 - ExerciseDocument4 pagesLF-Example B1 - ExerciseBambang Arie SNo ratings yet
- Kuliah 5a Formatting and Line CodingDocument74 pagesKuliah 5a Formatting and Line CodingBambang Arie SNo ratings yet
- Kuliah 1 Siskom AMDocument59 pagesKuliah 1 Siskom AMBambang Arie SNo ratings yet
- Proyek Akhir Dasar Komputer "Pedang"Document3 pagesProyek Akhir Dasar Komputer "Pedang"Bambang Arie SNo ratings yet
- Microsoft PowerPoint - Lecture 7 - Laplace Transform Rev 25.03.2014Document60 pagesMicrosoft PowerPoint - Lecture 7 - Laplace Transform Rev 25.03.2014Bambang Arie SNo ratings yet
- PR Matek KrisDocument4 pagesPR Matek KrisBambang Arie SNo ratings yet
- Narrow-Band Frequency Modulation: M (T) A Cos (2 F T)Document2 pagesNarrow-Band Frequency Modulation: M (T) A Cos (2 F T)Bambang Arie SNo ratings yet
- Bambang Arie Sadewo: Electrical Engineer Fresh GraduateDocument1 pageBambang Arie Sadewo: Electrical Engineer Fresh GraduateBambang Arie SNo ratings yet
- Bambang Arie Sadewo: About MeDocument3 pagesBambang Arie Sadewo: About MeBambang Arie SNo ratings yet
- Bambang Arie Sadewo: About MeDocument3 pagesBambang Arie Sadewo: About MeBambang Arie SNo ratings yet
- 7RW80 Load SheddingDocument8 pages7RW80 Load SheddingBambang Arie SNo ratings yet
- Class XII English Poem-2 Extract &QADocument7 pagesClass XII English Poem-2 Extract &QAsr2021No ratings yet
- Technical Qualities in The Poetry of Emily DickinsonDocument8 pagesTechnical Qualities in The Poetry of Emily DickinsonAnonymous CwJeBCAXpNo ratings yet
- Snack & Drink Vending MachinesDocument14 pagesSnack & Drink Vending MachinesAbel TeferaNo ratings yet
- Earning Outcomes: LSPU Self-Paced Learning Module (SLM)Document2 pagesEarning Outcomes: LSPU Self-Paced Learning Module (SLM)Donna DoradoNo ratings yet
- Canteen Data For Structure Meeting 27.11.2023Document6 pagesCanteen Data For Structure Meeting 27.11.2023cisfioclkpkbNo ratings yet
- Fargo Hdp6600 PrinterDocument4 pagesFargo Hdp6600 Printergroovey9040No ratings yet
- Application Letter CSCDocument2 pagesApplication Letter CSCtomalobitoNo ratings yet
- Rahul PrajapatiDocument9 pagesRahul PrajapatiAdv Tarun PantNo ratings yet
- Two Rook Checkmate: The Two Rook Checkmate Is One of The Simplest Checkmates You Can UseDocument1 pageTwo Rook Checkmate: The Two Rook Checkmate Is One of The Simplest Checkmates You Can UseKeyur GadaNo ratings yet
- The Influence of Globalization On Religious IssuesDocument20 pagesThe Influence of Globalization On Religious IssuesRhea Joy TabilidNo ratings yet
- Fulltext01 PDFDocument48 pagesFulltext01 PDFHossain AhmedNo ratings yet
- A Distinguished Warrior's Burial From DmanisiDocument2 pagesA Distinguished Warrior's Burial From DmanisiGeorgian National MuseumNo ratings yet
- Tamil LanguageDocument7 pagesTamil Languageimthi2ndmailNo ratings yet
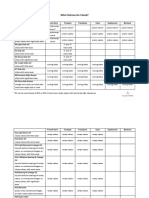
- What Hetman Do I NeedDocument2 pagesWhat Hetman Do I NeedCem GüngörNo ratings yet
- Module 7 Weathering As Exogenic ProcessDocument7 pagesModule 7 Weathering As Exogenic Processrose belle garciaNo ratings yet
- Sidewalk Labs Street Design Principles v.1Document17 pagesSidewalk Labs Street Design Principles v.1Conserve ISCFNo ratings yet
- Investment Law MarketingDocument6 pagesInvestment Law MarketingJust RandomNo ratings yet
- Beck PDFDocument1 pageBeck PDFWulan Purwanty100% (1)
- Idse Unit 2Document207 pagesIdse Unit 2farhan AliNo ratings yet
- Fabrik and Custom Joomla User Registration Forms2Document25 pagesFabrik and Custom Joomla User Registration Forms2Nasiru Abdullahi BabatsofoNo ratings yet
- Micropara 1Document8 pagesMicropara 1Jing DelfinNo ratings yet
- SemlerDocument2 pagesSemlerImane EmyNo ratings yet
- SysDocument13 pagesSysMariusNo ratings yet
- 9455 Sample Human Resource Management Attachment ReportDocument24 pages9455 Sample Human Resource Management Attachment Reportmillicent adhiamboNo ratings yet
- Ra 8353 PDFDocument4 pagesRa 8353 PDFchrisNo ratings yet
- SOCDocument4 pagesSOCJvnRodz P GmlmNo ratings yet
- Bruce Lawrence On Marshall HodgsonDocument6 pagesBruce Lawrence On Marshall HodgsonAbu TalibNo ratings yet