
M542d PDF
M542d PDF
You might also like
- Wireless Remote Manual HetronicDocument32 pagesWireless Remote Manual Hetronicpablo57% (7)
- TECO GS510 ManualDocument52 pagesTECO GS510 ManualMr.K ch75% (4)
- IEEE STD 3004.11-2019Document63 pagesIEEE STD 3004.11-2019Alexandre PereiraNo ratings yet
- MD2278 DDocument3 pagesMD2278 Dhoangmanh1989No ratings yet
- Datasheet - M542H Stepper Motor DriverDocument10 pagesDatasheet - M542H Stepper Motor DriversthollanderNo ratings yet
- Driver M542m para NEMA 23Document8 pagesDriver M542m para NEMA 23Alexander Pulido MarínNo ratings yet
- 25 A 20Document9 pages25 A 20s_barriosNo ratings yet
- Makeblock 2H Microstep DriverDocument4 pagesMakeblock 2H Microstep DriverMakeblockNo ratings yet
- NDC SheetDocument2 pagesNDC SheetAr RadzNo ratings yet
- HBS86 HDDocument7 pagesHBS86 HDLuis Flores0% (1)
- Dm542 ManualDocument5 pagesDm542 ManualJulio RuizNo ratings yet
- DY3E Three-Phase Compound Step Motor Driver User ManualDocument20 pagesDY3E Three-Phase Compound Step Motor Driver User ManualZoran ŠiručkaNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- Cdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Document27 pagesCdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Vlad PkNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Azbh 12 A 8Document8 pagesAzbh 12 A 8ElectromateNo ratings yet
- Manual Motores Do Ferro Velho SanyoDocument64 pagesManual Motores Do Ferro Velho SanyoanclamixNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Emko ATS10 Eng Short v00 PDFDocument6 pagesEmko ATS10 Eng Short v00 PDFCarmen Serbanoiu33% (3)
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument9 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- Edrive Ma860Document7 pagesEdrive Ma860khaldimohamedmalekabdallahNo ratings yet
- Edrive Ma860Document7 pagesEdrive Ma860marcyel Oliveira WoliveiraNo ratings yet
- Program Controller For RCA2/RCA: List of ModelsDocument10 pagesProgram Controller For RCA2/RCA: List of ModelsElectromateNo ratings yet
- Lock Out Relay PDFDocument10 pagesLock Out Relay PDFshaikhsajid242No ratings yet
- Rhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)Document11 pagesRhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)sanjeev kumarNo ratings yet
- User's Manual: High Performance Microstepping DriverDocument9 pagesUser's Manual: High Performance Microstepping Driverazat OrazowNo ratings yet
- Serie GMD06Document2 pagesSerie GMD06Popescu IonicaNo ratings yet
- Stepper Motor Driver DQ542MA DocumentDocument4 pagesStepper Motor Driver DQ542MA DocumentRenieNo ratings yet
- Stepper Motor Driver DQ542MA Document PDFDocument4 pagesStepper Motor Driver DQ542MA Document PDFRenieNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- C100 CatalogDocument20 pagesC100 CatalogMarcela RoneNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument13 pages3 Axis TB6560 CNC Driver Board Users ManualJoão Luis Paiva JuniorNo ratings yet
- M542 Stepper Motor DriveDocument8 pagesM542 Stepper Motor DriveElvio JungesNo ratings yet
- Program Controller For RCP3/RCP2 Series: List of ModelsDocument10 pagesProgram Controller For RCP3/RCP2 Series: List of ModelsElectromateNo ratings yet
- Samsung AC Servo System 2009 4Document40 pagesSamsung AC Servo System 2009 4Frank M C100% (1)
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Amc 12a8 SpecsheetDocument9 pagesAmc 12a8 SpecsheetElectromateNo ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Digital Controller R35Document12 pagesDigital Controller R35Takagi PhạmNo ratings yet
- Instruction and Service Manual Adjustable Frequency Crane ControlDocument9 pagesInstruction and Service Manual Adjustable Frequency Crane ControlJoss Maykol Mundaca VasquezNo ratings yet
- KA KR Motor Driver ManualDocument33 pagesKA KR Motor Driver Manualalexandr.vl.smk2No ratings yet
- SR03 01Mk2 Datasheet Rev4Document4 pagesSR03 01Mk2 Datasheet Rev4Sticker LaiNo ratings yet
- LS 231g3 Advanced Multifunctional Servo DriveDocument60 pagesLS 231g3 Advanced Multifunctional Servo DriveIlhami DemirNo ratings yet
- B 12 A 6Document8 pagesB 12 A 6Charles McNall100% (1)
- Honeywell DC1000 ShortDocument5 pagesHoneywell DC1000 ShortSi NiNo ratings yet
- SD-2H086MB User ManualDocument10 pagesSD-2H086MB User ManualJohn MiltonNo ratings yet
- AC Servo System: SDA Series 100W 3.5KWDocument22 pagesAC Servo System: SDA Series 100W 3.5KWSunil Kumar YelisettyNo ratings yet
- Danfuss Fc300 Doc MG33MD02Document221 pagesDanfuss Fc300 Doc MG33MD02Sohel SikderNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Edgeport®: Installation GuideDocument29 pagesEdgeport®: Installation GuidexhaneriNo ratings yet
- Ensim 2Document1 pageEnsim 2xhaneriNo ratings yet
- Edgeport Mounting DiagramsDocument19 pagesEdgeport Mounting DiagramsxhaneriNo ratings yet
- Et200s 2 Ai I 2 Wire ST Manual en-USDocument24 pagesEt200s 2 Ai I 2 Wire ST Manual en-USxhaneriNo ratings yet
- Survey On The Virtual Commissioning of Manufacturing SystemsDocument10 pagesSurvey On The Virtual Commissioning of Manufacturing SystemsxhaneriNo ratings yet
- Automatic Water Softener 3mDocument26 pagesAutomatic Water Softener 3mxhaneriNo ratings yet
- 10 Society 5.0: EfinitionDocument7 pages10 Society 5.0: EfinitionxhaneriNo ratings yet
- CAP Question: 1 August 2005Document1 pageCAP Question: 1 August 2005xhaneriNo ratings yet
- TC 7Document1 pageTC 7xhaneriNo ratings yet
- ISA Certified Control Systems Technician (CCST) Program: 1 July 2005Document1 pageISA Certified Control Systems Technician (CCST) Program: 1 July 2005xhaneriNo ratings yet
- ISA Certified Automation Professional (CAP) : Job Analysis Study 2004Document1 pageISA Certified Automation Professional (CAP) : Job Analysis Study 2004xhaneriNo ratings yet
- Op27 Op37 Operator Panels Manual PDFDocument238 pagesOp27 Op37 Operator Panels Manual PDFxhaneriNo ratings yet
- Preface: Book by The Engineer or Technician. Arithmetic and Algebra Are Employed in The SolutionDocument1 pagePreface: Book by The Engineer or Technician. Arithmetic and Algebra Are Employed in The SolutionxhaneriNo ratings yet
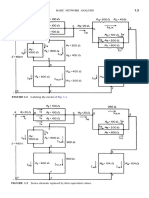
- Basic Network Analysis: FIGURE 1.2 Labeling The Circuit ofDocument1 pageBasic Network Analysis: FIGURE 1.2 Labeling The Circuit ofxhaneriNo ratings yet
- NjembDocument1 pageNjembxhaneriNo ratings yet
- User-Manual Item50288 en 3-2010Document20 pagesUser-Manual Item50288 en 3-2010xhaneriNo ratings yet
- B. Bayes' Rule:: Probability (Chap 1Document1 pageB. Bayes' Rule:: Probability (Chap 1xhaneriNo ratings yet
- Statutory Laws: The Health and Safety at Work Act 1974Document1 pageStatutory Laws: The Health and Safety at Work Act 1974xhaneriNo ratings yet
- 1.5 Equally Likely Events A. Finite Sample Space:: CHAP. 11 ProbabilityDocument1 page1.5 Equally Likely Events A. Finite Sample Space:: CHAP. 11 ProbabilityxhaneriNo ratings yet
- Berger Automating With SIMATICDocument1 pageBerger Automating With SIMATICxhaneriNo ratings yet
- FM 8500Document99 pagesFM 8500SergeyNo ratings yet
- Functions of Water User AssociationDocument2 pagesFunctions of Water User AssociationgknindrasenanNo ratings yet
- GU-612 - v3.1 - Guidelines - Incident Investigation and Reporting v1Document185 pagesGU-612 - v3.1 - Guidelines - Incident Investigation and Reporting v1rwerwerw100% (3)
- RBI - Grade BDocument4 pagesRBI - Grade Bamank114No ratings yet
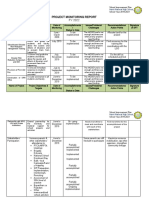
- Project Monitoring Report. GovernanceDocument6 pagesProject Monitoring Report. GovernanceJASMIN FAMANo ratings yet
- Free Study Material For UPSC IAS Paper I Essay Mains ExamDocument43 pagesFree Study Material For UPSC IAS Paper I Essay Mains Examdk9611222No ratings yet
- Ironpump PDFDocument14 pagesIronpump PDFrpicho0% (1)
- Introduction To Safety and Health in The Workplace: Occupational Accidents and Work-Related DiseasesDocument31 pagesIntroduction To Safety and Health in The Workplace: Occupational Accidents and Work-Related DiseasesEric Cruz AtienzaNo ratings yet
- Brand Loyalty Programmes of Coca-ColaDocument8 pagesBrand Loyalty Programmes of Coca-ColaYusuf MalikNo ratings yet
- Ravindra Babasaheb Nagare SEN Chapter No. 1Document19 pagesRavindra Babasaheb Nagare SEN Chapter No. 1mayakkayamgar228No ratings yet
- CS8091 BDA Unit1Document63 pagesCS8091 BDA Unit1arunaNo ratings yet
- CoP Step by Step Procedures PDFDocument5 pagesCoP Step by Step Procedures PDFThird MateNo ratings yet
- Btech Eee I Year Sylabus 2015Document130 pagesBtech Eee I Year Sylabus 2015upenderaitsNo ratings yet
- Chapter 9 Control of Microbial GrowthDocument52 pagesChapter 9 Control of Microbial GrowthMICHELLE GARCIANo ratings yet
- Ethical Issues in The Employer EmployeeDocument2 pagesEthical Issues in The Employer EmployeekiranNo ratings yet
- Rule 4: Jurisdiction of Arbitral Tribunal Article 4.16. Competence of Arbitral Tribunal To Rule On Its JurisdictionDocument1 pageRule 4: Jurisdiction of Arbitral Tribunal Article 4.16. Competence of Arbitral Tribunal To Rule On Its JurisdictionTaroy CeeNo ratings yet
- Catalogue Skydome enDocument16 pagesCatalogue Skydome enBantomkdNo ratings yet
- Ch6 Performance Appraisal 1Document22 pagesCh6 Performance Appraisal 1Aditi Hebli0% (1)
- Foundations On Rock PresentationDocument0 pagesFoundations On Rock PresentationMehdi MirNo ratings yet
- Simplex 4081-0002Document2 pagesSimplex 4081-0002vlaya1984No ratings yet
- Allied Services - 7Document9 pagesAllied Services - 7asaSNo ratings yet
- Information On The MIP Program Session 2018-2020: (Last Update: August 2017)Document3 pagesInformation On The MIP Program Session 2018-2020: (Last Update: August 2017)Imran JuttNo ratings yet
- RC-Noida Study CentersDocument28 pagesRC-Noida Study CentersVinod KumarNo ratings yet
- Generate Birth Horoscope, Tamil Jathagam, Tamil Birth Jathakam, South and North Indian Style Horoscope Software PDFDocument4 pagesGenerate Birth Horoscope, Tamil Jathagam, Tamil Birth Jathakam, South and North Indian Style Horoscope Software PDFShanmugam S100% (1)
- Astm E1135Document5 pagesAstm E1135Deepak JNo ratings yet
- QuestionsDocument49 pagesQuestionsGitika TiwariNo ratings yet
- Quarterly Income Tax Return: Yes NoDocument3 pagesQuarterly Income Tax Return: Yes NoSusan P LauronNo ratings yet
- Ofcom Site Blocking Report With Redactions RemovedDocument56 pagesOfcom Site Blocking Report With Redactions RemovedTJ McIntyreNo ratings yet










































































































You might also like
- Wireless Remote Manual HetronicDocument32 pagesWireless Remote Manual Hetronicpablo57% (7)
- TECO GS510 ManualDocument52 pagesTECO GS510 ManualMr.K ch75% (4)
- IEEE STD 3004.11-2019Document63 pagesIEEE STD 3004.11-2019Alexandre PereiraNo ratings yet
- MD2278 DDocument3 pagesMD2278 Dhoangmanh1989No ratings yet
- Datasheet - M542H Stepper Motor DriverDocument10 pagesDatasheet - M542H Stepper Motor DriversthollanderNo ratings yet
- Driver M542m para NEMA 23Document8 pagesDriver M542m para NEMA 23Alexander Pulido MarínNo ratings yet
- 25 A 20Document9 pages25 A 20s_barriosNo ratings yet
- Makeblock 2H Microstep DriverDocument4 pagesMakeblock 2H Microstep DriverMakeblockNo ratings yet
- NDC SheetDocument2 pagesNDC SheetAr RadzNo ratings yet
- HBS86 HDDocument7 pagesHBS86 HDLuis Flores0% (1)
- Dm542 ManualDocument5 pagesDm542 ManualJulio RuizNo ratings yet
- DY3E Three-Phase Compound Step Motor Driver User ManualDocument20 pagesDY3E Three-Phase Compound Step Motor Driver User ManualZoran ŠiručkaNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- Cdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Document27 pagesCdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Vlad PkNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Azbh 12 A 8Document8 pagesAzbh 12 A 8ElectromateNo ratings yet
- Manual Motores Do Ferro Velho SanyoDocument64 pagesManual Motores Do Ferro Velho SanyoanclamixNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Emko ATS10 Eng Short v00 PDFDocument6 pagesEmko ATS10 Eng Short v00 PDFCarmen Serbanoiu33% (3)
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument9 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- Edrive Ma860Document7 pagesEdrive Ma860khaldimohamedmalekabdallahNo ratings yet
- Edrive Ma860Document7 pagesEdrive Ma860marcyel Oliveira WoliveiraNo ratings yet
- Program Controller For RCA2/RCA: List of ModelsDocument10 pagesProgram Controller For RCA2/RCA: List of ModelsElectromateNo ratings yet
- Lock Out Relay PDFDocument10 pagesLock Out Relay PDFshaikhsajid242No ratings yet
- Rhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)Document11 pagesRhino Motion Controls: RMCS-1102 v2.0 Micro-Stepping Motor Driver With ENABLE (Max. 50Vdc and 5A Per Phase)sanjeev kumarNo ratings yet
- User's Manual: High Performance Microstepping DriverDocument9 pagesUser's Manual: High Performance Microstepping Driverazat OrazowNo ratings yet
- Serie GMD06Document2 pagesSerie GMD06Popescu IonicaNo ratings yet
- Stepper Motor Driver DQ542MA DocumentDocument4 pagesStepper Motor Driver DQ542MA DocumentRenieNo ratings yet
- Stepper Motor Driver DQ542MA Document PDFDocument4 pagesStepper Motor Driver DQ542MA Document PDFRenieNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- C100 CatalogDocument20 pagesC100 CatalogMarcela RoneNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument13 pages3 Axis TB6560 CNC Driver Board Users ManualJoão Luis Paiva JuniorNo ratings yet
- M542 Stepper Motor DriveDocument8 pagesM542 Stepper Motor DriveElvio JungesNo ratings yet
- Program Controller For RCP3/RCP2 Series: List of ModelsDocument10 pagesProgram Controller For RCP3/RCP2 Series: List of ModelsElectromateNo ratings yet
- Samsung AC Servo System 2009 4Document40 pagesSamsung AC Servo System 2009 4Frank M C100% (1)
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Amc 12a8 SpecsheetDocument9 pagesAmc 12a8 SpecsheetElectromateNo ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Digital Controller R35Document12 pagesDigital Controller R35Takagi PhạmNo ratings yet
- Instruction and Service Manual Adjustable Frequency Crane ControlDocument9 pagesInstruction and Service Manual Adjustable Frequency Crane ControlJoss Maykol Mundaca VasquezNo ratings yet
- KA KR Motor Driver ManualDocument33 pagesKA KR Motor Driver Manualalexandr.vl.smk2No ratings yet
- SR03 01Mk2 Datasheet Rev4Document4 pagesSR03 01Mk2 Datasheet Rev4Sticker LaiNo ratings yet
- LS 231g3 Advanced Multifunctional Servo DriveDocument60 pagesLS 231g3 Advanced Multifunctional Servo DriveIlhami DemirNo ratings yet
- B 12 A 6Document8 pagesB 12 A 6Charles McNall100% (1)
- Honeywell DC1000 ShortDocument5 pagesHoneywell DC1000 ShortSi NiNo ratings yet
- SD-2H086MB User ManualDocument10 pagesSD-2H086MB User ManualJohn MiltonNo ratings yet
- AC Servo System: SDA Series 100W 3.5KWDocument22 pagesAC Servo System: SDA Series 100W 3.5KWSunil Kumar YelisettyNo ratings yet
- Danfuss Fc300 Doc MG33MD02Document221 pagesDanfuss Fc300 Doc MG33MD02Sohel SikderNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Edgeport®: Installation GuideDocument29 pagesEdgeport®: Installation GuidexhaneriNo ratings yet
- Ensim 2Document1 pageEnsim 2xhaneriNo ratings yet
- Edgeport Mounting DiagramsDocument19 pagesEdgeport Mounting DiagramsxhaneriNo ratings yet
- Et200s 2 Ai I 2 Wire ST Manual en-USDocument24 pagesEt200s 2 Ai I 2 Wire ST Manual en-USxhaneriNo ratings yet
- Survey On The Virtual Commissioning of Manufacturing SystemsDocument10 pagesSurvey On The Virtual Commissioning of Manufacturing SystemsxhaneriNo ratings yet
- Automatic Water Softener 3mDocument26 pagesAutomatic Water Softener 3mxhaneriNo ratings yet
- 10 Society 5.0: EfinitionDocument7 pages10 Society 5.0: EfinitionxhaneriNo ratings yet
- CAP Question: 1 August 2005Document1 pageCAP Question: 1 August 2005xhaneriNo ratings yet
- TC 7Document1 pageTC 7xhaneriNo ratings yet
- ISA Certified Control Systems Technician (CCST) Program: 1 July 2005Document1 pageISA Certified Control Systems Technician (CCST) Program: 1 July 2005xhaneriNo ratings yet
- ISA Certified Automation Professional (CAP) : Job Analysis Study 2004Document1 pageISA Certified Automation Professional (CAP) : Job Analysis Study 2004xhaneriNo ratings yet
- Op27 Op37 Operator Panels Manual PDFDocument238 pagesOp27 Op37 Operator Panels Manual PDFxhaneriNo ratings yet
- Preface: Book by The Engineer or Technician. Arithmetic and Algebra Are Employed in The SolutionDocument1 pagePreface: Book by The Engineer or Technician. Arithmetic and Algebra Are Employed in The SolutionxhaneriNo ratings yet
- Basic Network Analysis: FIGURE 1.2 Labeling The Circuit ofDocument1 pageBasic Network Analysis: FIGURE 1.2 Labeling The Circuit ofxhaneriNo ratings yet
- NjembDocument1 pageNjembxhaneriNo ratings yet
- User-Manual Item50288 en 3-2010Document20 pagesUser-Manual Item50288 en 3-2010xhaneriNo ratings yet
- B. Bayes' Rule:: Probability (Chap 1Document1 pageB. Bayes' Rule:: Probability (Chap 1xhaneriNo ratings yet
- Statutory Laws: The Health and Safety at Work Act 1974Document1 pageStatutory Laws: The Health and Safety at Work Act 1974xhaneriNo ratings yet
- 1.5 Equally Likely Events A. Finite Sample Space:: CHAP. 11 ProbabilityDocument1 page1.5 Equally Likely Events A. Finite Sample Space:: CHAP. 11 ProbabilityxhaneriNo ratings yet
- Berger Automating With SIMATICDocument1 pageBerger Automating With SIMATICxhaneriNo ratings yet
- FM 8500Document99 pagesFM 8500SergeyNo ratings yet
- Functions of Water User AssociationDocument2 pagesFunctions of Water User AssociationgknindrasenanNo ratings yet
- GU-612 - v3.1 - Guidelines - Incident Investigation and Reporting v1Document185 pagesGU-612 - v3.1 - Guidelines - Incident Investigation and Reporting v1rwerwerw100% (3)
- RBI - Grade BDocument4 pagesRBI - Grade Bamank114No ratings yet
- Project Monitoring Report. GovernanceDocument6 pagesProject Monitoring Report. GovernanceJASMIN FAMANo ratings yet
- Free Study Material For UPSC IAS Paper I Essay Mains ExamDocument43 pagesFree Study Material For UPSC IAS Paper I Essay Mains Examdk9611222No ratings yet
- Ironpump PDFDocument14 pagesIronpump PDFrpicho0% (1)
- Introduction To Safety and Health in The Workplace: Occupational Accidents and Work-Related DiseasesDocument31 pagesIntroduction To Safety and Health in The Workplace: Occupational Accidents and Work-Related DiseasesEric Cruz AtienzaNo ratings yet
- Brand Loyalty Programmes of Coca-ColaDocument8 pagesBrand Loyalty Programmes of Coca-ColaYusuf MalikNo ratings yet
- Ravindra Babasaheb Nagare SEN Chapter No. 1Document19 pagesRavindra Babasaheb Nagare SEN Chapter No. 1mayakkayamgar228No ratings yet
- CS8091 BDA Unit1Document63 pagesCS8091 BDA Unit1arunaNo ratings yet
- CoP Step by Step Procedures PDFDocument5 pagesCoP Step by Step Procedures PDFThird MateNo ratings yet
- Btech Eee I Year Sylabus 2015Document130 pagesBtech Eee I Year Sylabus 2015upenderaitsNo ratings yet
- Chapter 9 Control of Microbial GrowthDocument52 pagesChapter 9 Control of Microbial GrowthMICHELLE GARCIANo ratings yet
- Ethical Issues in The Employer EmployeeDocument2 pagesEthical Issues in The Employer EmployeekiranNo ratings yet
- Rule 4: Jurisdiction of Arbitral Tribunal Article 4.16. Competence of Arbitral Tribunal To Rule On Its JurisdictionDocument1 pageRule 4: Jurisdiction of Arbitral Tribunal Article 4.16. Competence of Arbitral Tribunal To Rule On Its JurisdictionTaroy CeeNo ratings yet
- Catalogue Skydome enDocument16 pagesCatalogue Skydome enBantomkdNo ratings yet
- Ch6 Performance Appraisal 1Document22 pagesCh6 Performance Appraisal 1Aditi Hebli0% (1)
- Foundations On Rock PresentationDocument0 pagesFoundations On Rock PresentationMehdi MirNo ratings yet
- Simplex 4081-0002Document2 pagesSimplex 4081-0002vlaya1984No ratings yet
- Allied Services - 7Document9 pagesAllied Services - 7asaSNo ratings yet
- Information On The MIP Program Session 2018-2020: (Last Update: August 2017)Document3 pagesInformation On The MIP Program Session 2018-2020: (Last Update: August 2017)Imran JuttNo ratings yet
- RC-Noida Study CentersDocument28 pagesRC-Noida Study CentersVinod KumarNo ratings yet
- Generate Birth Horoscope, Tamil Jathagam, Tamil Birth Jathakam, South and North Indian Style Horoscope Software PDFDocument4 pagesGenerate Birth Horoscope, Tamil Jathagam, Tamil Birth Jathakam, South and North Indian Style Horoscope Software PDFShanmugam S100% (1)
- Astm E1135Document5 pagesAstm E1135Deepak JNo ratings yet
- QuestionsDocument49 pagesQuestionsGitika TiwariNo ratings yet
- Quarterly Income Tax Return: Yes NoDocument3 pagesQuarterly Income Tax Return: Yes NoSusan P LauronNo ratings yet
- Ofcom Site Blocking Report With Redactions RemovedDocument56 pagesOfcom Site Blocking Report With Redactions RemovedTJ McIntyreNo ratings yet