You might also like
- L11 ControlOverride SimuladorDocument8 pagesL11 ControlOverride SimuladorCesar Rojas YngaNo ratings yet
- Rodrigo Informe OverrideDocument9 pagesRodrigo Informe Overriderodrigo.solorzanoNo ratings yet
- 1 Simula Control OverrideDocument3 pages1 Simula Control OverrideDennis Quispilaya Chanca100% (1)
- Lab 07 OverrideDocument14 pagesLab 07 Overridecompaq_usuarioNo ratings yet
- Control de Procesos - Lab 11Document11 pagesControl de Procesos - Lab 11Franklin CremaNo ratings yet
- Lab12 - Control Automatico IIDocument26 pagesLab12 - Control Automatico IISeVictor Rudas CajaNo ratings yet
- l3 Override Software 2016Document15 pagesl3 Override Software 2016QuispePumaJNo ratings yet
- Prueba 4 Programación Avanzada de Controladores El REGALO-1Document4 pagesPrueba 4 Programación Avanzada de Controladores El REGALO-1José Osses EspinosaNo ratings yet
- Clase 1 Control en CascadaDocument30 pagesClase 1 Control en CascadaBryanGutierrezNo ratings yet
- 2autosintonía PDFDocument26 pages2autosintonía PDFJaimeNo ratings yet
- 1 Simula Control CascadaDocument5 pages1 Simula Control CascadaAlexander Quispe QuispeNo ratings yet
- Cuestionario CONTROLADORESDocument5 pagesCuestionario CONTROLADORESAbezaid Gamez100% (1)
- Lab. N°5 Sistema de Control Pid PDFDocument21 pagesLab. N°5 Sistema de Control Pid PDFMarioly Rodriguez VidalNo ratings yet
- Control Selectivo y Anticipadoo. Sonia Valdés SánchezDocument4 pagesControl Selectivo y Anticipadoo. Sonia Valdés SánchezHelí AngelesNo ratings yet
- Fundamentos para Controles de Procesos PDFDocument110 pagesFundamentos para Controles de Procesos PDFMaria danielaNo ratings yet
- Guia Programacion Avanzad Pid Delta PDFDocument14 pagesGuia Programacion Avanzad Pid Delta PDFJorgeNo ratings yet
- G5 Sintonización de Controladores PIDDocument13 pagesG5 Sintonización de Controladores PIDPatricio EstrellaNo ratings yet
- 2020-LAB11 - Sintonía Al TanteoDocument8 pages2020-LAB11 - Sintonía Al TanteoYordi AlvitresNo ratings yet
- Control Lab08Document11 pagesControl Lab08Jean CcNo ratings yet
- Control Proporcional, Integral y DerivativoDocument8 pagesControl Proporcional, Integral y DerivativoFausto TapiaNo ratings yet
- Informe - Lab 18 - Control DesacoploDocument14 pagesInforme - Lab 18 - Control DesacoploAngie Morales MorenoNo ratings yet
- l5 Cascada SoftwareDocument18 pagesl5 Cascada SoftwareRenatoRiosGuineaNo ratings yet
- Preguntas de ControlDocument5 pagesPreguntas de ControlRicardo Zaoldyeck Tapia Robledo100% (2)
- Instrumentacion MadisonDocument41 pagesInstrumentacion MadisonMadison Arévalo LópezNo ratings yet
- Controladores AutosintonizablesDocument24 pagesControladores AutosintonizablesJose Antonio PinGlo MarkzNo ratings yet
- Lab 08 FeedForwardDocument23 pagesLab 08 FeedForwardcompaq_usuarioNo ratings yet
- CP Lab 12Document6 pagesCP Lab 12Mauricio ARNo ratings yet
- CP Lab 12Document6 pagesCP Lab 12Mauricio ARNo ratings yet
- Agustín Xiaodong de La Torre Franco - Ejercicio 20 Neumatica BásicaDocument5 pagesAgustín Xiaodong de La Torre Franco - Ejercicio 20 Neumatica Básicaagustin.xiaodong.delatorre.francoNo ratings yet
- BuenoDocument14 pagesBuenoArturo Hernández MoralesNo ratings yet
- Control PIDDocument65 pagesControl PIDChristian OqNo ratings yet
- Cascada Caso EstudioDocument8 pagesCascada Caso EstudioJuanCarlosJoveJinézNo ratings yet
- Controladores IndustrialesDocument4 pagesControladores IndustrialesyonatanNo ratings yet
- Tipos de Controladores ModificadaDocument15 pagesTipos de Controladores ModificadaMario MontesNo ratings yet
- Controladores de Dos PosicionesDocument2 pagesControladores de Dos PosicionesCluisantony Jayco DizeNo ratings yet
- Teoría de Control y RobóticaDocument6 pagesTeoría de Control y RobóticaRicardo Páramo BernalNo ratings yet
- LAB 11 CONTROL de ProcesosDocument13 pagesLAB 11 CONTROL de ProcesosJhamesBrajhamLauraJoaquin100% (1)
- Control de Procesos 2Document14 pagesControl de Procesos 2Benjhy Jordan Castillo ValeraNo ratings yet
- Tipos de ControladoresDocument15 pagesTipos de ControladoresMario MontesNo ratings yet
- Clase 8 2020Document13 pagesClase 8 2020Yessica Von StreberNo ratings yet
- MT221 Compensadores TiposDocument11 pagesMT221 Compensadores TiposChristian Huertas CavadaNo ratings yet
- Programación Ladder en PLC Con LogixProDocument15 pagesProgramación Ladder en PLC Con LogixProArturo CMNo ratings yet
- CAPITULO 5 - Estabilidad en Sistemas de ControlDocument32 pagesCAPITULO 5 - Estabilidad en Sistemas de ControlCatherine AntonietaNo ratings yet
- PDF Reporte de Investigacion Unidad 4 ControladoresDocument16 pagesPDF Reporte de Investigacion Unidad 4 ControladoresRicardo Hernandez bustosNo ratings yet
- Recapitulación CAP Unidad 1 Lazos de ControlDocument8 pagesRecapitulación CAP Unidad 1 Lazos de ControlRustica CuadernosNo ratings yet
- Control de Procesos - Lab 12Document18 pagesControl de Procesos - Lab 12Elvis GarciaNo ratings yet
- Lab Control 3Document38 pagesLab Control 3Wilar Humpiri Turpo100% (1)
- Diseño de Sistemas de ControlDocument8 pagesDiseño de Sistemas de ControlAdrian CifuentesNo ratings yet
- Modos de ControlDocument12 pagesModos de ControlAnonymous qjfLLSHo100% (1)
- Proyecto Final Sistema de ControlDocument8 pagesProyecto Final Sistema de ControlChristian JJ BasalduaNo ratings yet
- Apuntes ControladoresDocument7 pagesApuntes ControladoresDiego Fragoso SalinasNo ratings yet
- Examen DosDocument5 pagesExamen DosJose Antonio Ormeño VillaNo ratings yet
- Controladores Industriales y Acciones de ControlDocument50 pagesControladores Industriales y Acciones de ControlrambetsNo ratings yet
- Practica Control Cascada - Control de ProcesosDocument26 pagesPractica Control Cascada - Control de ProcesosFernando Coria BalbuenaNo ratings yet
- Trabajo Semana 7 Unidad 3 Fundamentos de Lazo de ControlDocument17 pagesTrabajo Semana 7 Unidad 3 Fundamentos de Lazo de ControlElliot PormaNo ratings yet
- Controlador PID de Servomotor Con PLC Siemens S7Document3 pagesControlador PID de Servomotor Con PLC Siemens S7Alba CaceresNo ratings yet
- Mantenimiento de sistemas de climatización. TMVG0209From EverandMantenimiento de sistemas de climatización. TMVG0209No ratings yet
- UF0466 - Testeo y verificación de equipos y periféricos microinformáticosFrom EverandUF0466 - Testeo y verificación de equipos y periféricos microinformáticosNo ratings yet
- Código Deontológico Del Psicólogo.Document20 pagesCódigo Deontológico Del Psicólogo.carlosmespinozar1866No ratings yet
- El Arte de La Influencia, Notas de PersuasiónDocument31 pagesEl Arte de La Influencia, Notas de PersuasiónJesús MartínNo ratings yet
- Inglés IDocument11 pagesInglés IAnthony Frank Perez OrtizNo ratings yet
- Ofimática IIDocument8 pagesOfimática IIAnthony Frank Perez OrtizNo ratings yet
- La Mente Del EstrategaDocument15 pagesLa Mente Del EstrategaMonica Gomez GarciaNo ratings yet
- Moral y ÉticaDocument13 pagesMoral y ÉticaAdii VilHerNo ratings yet
- La Voz Del ÉxitoDocument14 pagesLa Voz Del ÉxitoHarry Haller100% (1)
- Introducción A La Psicología CientíficaDocument58 pagesIntroducción A La Psicología Científicazdczxc100% (1)
- Semana 2.0Document31 pagesSemana 2.0Anthony Frank Perez Ortiz100% (1)
- Potencia Lab10Document5 pagesPotencia Lab10Anthony Frank Perez OrtizNo ratings yet
- Calidad y Mejora Continua - Semana 6 VirtualDocument27 pagesCalidad y Mejora Continua - Semana 6 VirtualAnthony Frank Perez OrtizNo ratings yet
- Reporte5 Electrónica de Potencia C5 B Perez OrtizDocument5 pagesReporte5 Electrónica de Potencia C5 B Perez OrtizAnthony Frank Perez OrtizNo ratings yet
- Potencia 4Document6 pagesPotencia 4Anthony Frank Perez OrtizNo ratings yet
- Reporete 12 PotenciaDocument7 pagesReporete 12 PotenciaAnthony Frank Perez OrtizNo ratings yet
- Reporte 6 Electrónica de Potencia C5 B Perez OrtizDocument3 pagesReporte 6 Electrónica de Potencia C5 B Perez OrtizAnthony Frank Perez OrtizNo ratings yet
- Conclusiones Lab 4Document1 pageConclusiones Lab 4Anthony Frank Perez OrtizNo ratings yet
- Reporte 7 Electrónica de Potencia C5 B Perez OrtizDocument8 pagesReporte 7 Electrónica de Potencia C5 B Perez OrtizAnthony Frank Perez Ortiz100% (1)
- Potencia Lab10Document5 pagesPotencia Lab10Anthony Frank Perez OrtizNo ratings yet
- Reporte5 Electrónica de Potencia C5 B Perez OrtizDocument5 pagesReporte5 Electrónica de Potencia C5 B Perez OrtizAnthony Frank Perez OrtizNo ratings yet
- Parte de Introdución Lab 5Document2 pagesParte de Introdución Lab 5Anthony Frank Perez OrtizNo ratings yet
- Reporte 4Document7 pagesReporte 4Anthony Frank Perez OrtizNo ratings yet
- Informe de Estrategias y Control Lab 7Document9 pagesInforme de Estrategias y Control Lab 7Anthony Frank Perez OrtizNo ratings yet
- Reporte1 Electrónica de Potencia C5 B Perez OrtizDocument5 pagesReporte1 Electrónica de Potencia C5 B Perez OrtizAnthony Frank Perez OrtizNo ratings yet
- Lab1 Controladores Lógicos Programables Control ContinuoDocument12 pagesLab1 Controladores Lógicos Programables Control ContinuoAnthony Frank Perez OrtizNo ratings yet
- Máquinas Eléctricas Lab 1Document17 pagesMáquinas Eléctricas Lab 1Anthony Frank Perez Ortiz100% (1)
- Máquinas Eléctricas Lab 1Document17 pagesMáquinas Eléctricas Lab 1Anthony Frank Perez Ortiz100% (1)
- Docproducte 12434Document6 pagesDocproducte 12434lorenzoNo ratings yet
- S013.s1 - TareaDocument4 pagesS013.s1 - TareaYann Coaguila ArenasNo ratings yet
- Ejercicios de Modelo Keynesiano SimpleDocument12 pagesEjercicios de Modelo Keynesiano SimpleFranklin Vargast IneoNo ratings yet
- Los Principales Factores Ambientales y de Suelos Que Influyen Sobre La Productividad y El ManejoDocument4 pagesLos Principales Factores Ambientales y de Suelos Que Influyen Sobre La Productividad y El ManejoErika Calua VillanuevaNo ratings yet
- Matematicas Ejercicios Resueltos Soluciones Sistemas de Ecuaciones 3º ESODocument25 pagesMatematicas Ejercicios Resueltos Soluciones Sistemas de Ecuaciones 3º ESOrogerchapiNo ratings yet
- Absolución de Demanda de Conducir AbcDocument4 pagesAbsolución de Demanda de Conducir AbcJuan José Carrasco EspinozaNo ratings yet
- Resolucion 1058 de 2010 PDFDocument8 pagesResolucion 1058 de 2010 PDFpaola zamoraNo ratings yet
- Valoracioncontingente PDFDocument34 pagesValoracioncontingente PDFBRISA NAGHELY GARECA VELASQUEZNo ratings yet
- Eco SoapDocument3 pagesEco SoapFrida Gtz'No ratings yet
- Practica 5Document12 pagesPractica 5Mariana CaralampioNo ratings yet
- Cuentas de Cobro Insumos y Mano de ObraDocument11 pagesCuentas de Cobro Insumos y Mano de Obrayajayra leiton rojasNo ratings yet
- Facturación Del Reembolso de Gastos 202207041706492223Document2 pagesFacturación Del Reembolso de Gastos 202207041706492223Julio César GuerraNo ratings yet
- IbaDocument2 pagesIbaJesus VergaraNo ratings yet
- Ejemplo Reporte A3 - DERCODocument14 pagesEjemplo Reporte A3 - DERCOJohn Francisco Murrugarra ZuñigaNo ratings yet
- Instrucciones Instalacion JacuzziDocument1 pageInstrucciones Instalacion JacuzziIván Palacio RestrepoNo ratings yet
- Breyner Cuello AnalisisYPlaneacion PDFDocument9 pagesBreyner Cuello AnalisisYPlaneacion PDFBreyner Enrique Cuello DuranNo ratings yet
- Integracion de Los Costos Indirectos de Los Santos U2Document61 pagesIntegracion de Los Costos Indirectos de Los Santos U2gabriel munguia100% (1)
- DPG Trabajo FinalDocument26 pagesDPG Trabajo FinalJHONNY ROGELIO CRESPO ROCANo ratings yet
- Proyecto ..Document84 pagesProyecto ..0913012191No ratings yet
- Escuelas Vittra SueciaDocument3 pagesEscuelas Vittra SueciaIsabel Crego FragaNo ratings yet
- PRUEBA TÉCNICA LARAVEL - FullStack DEVELOPER 18 de AgostoDocument3 pagesPRUEBA TÉCNICA LARAVEL - FullStack DEVELOPER 18 de AgostoFreddy CamposNo ratings yet
- Teresstic 68Document9 pagesTeresstic 68juanandres her042No ratings yet
- Guia Ejercicios Calculo de ProtecccionesDocument2 pagesGuia Ejercicios Calculo de Protecccionescristian astudilloNo ratings yet
- Guía de Control EstadísticoDocument5 pagesGuía de Control EstadísticoTosta LarryNo ratings yet
- Simulador BCPSIO II Ejercicio 2Document2 pagesSimulador BCPSIO II Ejercicio 2elisa brigidaNo ratings yet
- Exposicion Al RES ABR21 02ABR21Document62 pagesExposicion Al RES ABR21 02ABR21JHON KENNYNo ratings yet
- FB 110 SiemensDocument67 pagesFB 110 SiemensAbraham Enrique Mata RamirezNo ratings yet
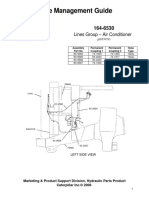
- Hose Management Guide: SN: 2Bw Lines Group - Air ConditionerDocument69 pagesHose Management Guide: SN: 2Bw Lines Group - Air ConditionerlhNo ratings yet
- 2 MT-PER-MA-01 Matriz ICAAS - CorporativoDocument1 page2 MT-PER-MA-01 Matriz ICAAS - CorporativoYesica SanchezNo ratings yet