You might also like
- Pragati - BTP Turret ManualDocument31 pagesPragati - BTP Turret Manualchidambaram kasi100% (17)
- Valve Actuators C13Document5 pagesValve Actuators C13Jose F Rivera Morales100% (3)
- Fanuc CNC Parts: Rigid Tapping TroubleshootingDocument6 pagesFanuc CNC Parts: Rigid Tapping TroubleshootingTony AntonyNo ratings yet
- Valve Lash C13Document4 pagesValve Lash C13Jose F Rivera Morales100% (1)
- TP31201-1 700 Multi-Link Rear SuspensionDocument42 pagesTP31201-1 700 Multi-Link Rear Suspensionvanapeer100% (1)
- Bhs PDF en RDVDocument10 pagesBhs PDF en RDVolgiertNo ratings yet
- Tutorial Completo Stepper SKCDocument52 pagesTutorial Completo Stepper SKCricwerNo ratings yet
- Torque SensorDocument6 pagesTorque SensorBayu Ari MurtiNo ratings yet
- AGN 235 - Generating Set Assembly - Torsional Vibration AnalysisDocument10 pagesAGN 235 - Generating Set Assembly - Torsional Vibration AnalysisariwibowoNo ratings yet
- Syncrosnap® Centrifugal Switches For Single-Phase Electric MotorsDocument4 pagesSyncrosnap® Centrifugal Switches For Single-Phase Electric MotorsMohit GargNo ratings yet
- Cat C11-C13-C15-C18 MANUAL DE CALIBRACIONESDocument27 pagesCat C11-C13-C15-C18 MANUAL DE CALIBRACIONESclaudio80% (5)
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- Backlashvs LostMotion PDFDocument4 pagesBacklashvs LostMotion PDFjeyaselvanmNo ratings yet
- Epicyclic Gear Train ApparatusDocument8 pagesEpicyclic Gear Train ApparatusGurmeet Mehma83% (6)
- SDP-SI - Junta UniversalDocument8 pagesSDP-SI - Junta UniversalAndré Cristiano SouzaNo ratings yet
- Harmonic Hdi Infinit Indexer CatalogDocument6 pagesHarmonic Hdi Infinit Indexer CatalogElectromateNo ratings yet
- 5.2 - ABS Braking System (OCR)Document126 pages5.2 - ABS Braking System (OCR)mnbvqwert100% (1)
- Dynamic Analysis of Engine Valvetrain and Its Effects On CamshaftDocument5 pagesDynamic Analysis of Engine Valvetrain and Its Effects On CamshaftIjsrnet EditorialNo ratings yet
- BS3 Crank TriggerDocument27 pagesBS3 Crank TriggerdaveplNo ratings yet
- Shimpo Traction Drive VariableDocument44 pagesShimpo Traction Drive VariableJuan GarciaNo ratings yet
- Brushless MotorsDocument3 pagesBrushless MotorsHossam DawoodNo ratings yet
- Manual de Servicio Motores M6 M7 DenisonDocument24 pagesManual de Servicio Motores M6 M7 DenisonaugustoNo ratings yet
- QuickServe+Online+ + (4310591) N14+Base+Engine+ (STC,+Celect™,+Celect+Plus™) +Service+ManualDocument16 pagesQuickServe+Online+ + (4310591) N14+Base+Engine+ (STC,+Celect™,+Celect+Plus™) +Service+ManualZakNo ratings yet
- 2 Marks Multi Speed Gear BoxDocument7 pages2 Marks Multi Speed Gear Boxkpreddy_6171No ratings yet
- Shimpo Circulute 3000 CatalogDocument36 pagesShimpo Circulute 3000 CatalogElectromateNo ratings yet
- Torque and Inertia CalculationsDocument20 pagesTorque and Inertia Calculationsmanfredm6435No ratings yet
- Testing & Adjusting Valve Lash C18Document4 pagesTesting & Adjusting Valve Lash C18Sapar SouzaNo ratings yet
- Calibracion Actuador Valvula Variable c11Document5 pagesCalibracion Actuador Valvula Variable c11Jordan RaveloNo ratings yet
- Shaft Eccentricity Measurements DMXDocument4 pagesShaft Eccentricity Measurements DMXSawatchai SroynarkNo ratings yet
- Application Note AN-SERV-001Document18 pagesApplication Note AN-SERV-001viernes06No ratings yet
- Oriental MotorDocument23 pagesOriental MotorSameer SangvikarNo ratings yet
- 950H - Ajuste de Luz de VálvulasDocument4 pages950H - Ajuste de Luz de VálvulasRenato Assis da Silva100% (2)
- QuickServe Online - (4021499) K19 Service ManualDocument10 pagesQuickServe Online - (4021499) K19 Service Manualengmohsen.ramadanhotmail.com100% (1)
- Engine Valve Lash - Inspect/Adjust: Shutdown SISDocument5 pagesEngine Valve Lash - Inspect/Adjust: Shutdown SISChakrouneNo ratings yet
- Actuator General KC 03 040Document10 pagesActuator General KC 03 040Devendrasinh JadejaNo ratings yet
- Run OutDocument2 pagesRun OutMohamed BorhamNo ratings yet
- Harmonic DriveDocument52 pagesHarmonic DriveRahul TanwarNo ratings yet
- Valve LashDocument4 pagesValve Lashrafkaalika627No ratings yet
- Ball Screw CalculatorDocument60 pagesBall Screw Calculatorمنير بوزيدNo ratings yet
- Calibracion de Valvulas 966H - 01Document5 pagesCalibracion de Valvulas 966H - 01Freddy QuispeNo ratings yet
- Chapter 8 RevaDocument20 pagesChapter 8 RevaanildhakeNo ratings yet
- 324D-CALIBRACION VALVULASsis - Cat.com Sisweb Sisweb Techdoc Techdoc Print Page - JsDocument5 pages324D-CALIBRACION VALVULASsis - Cat.com Sisweb Sisweb Techdoc Techdoc Print Page - JsjhonNo ratings yet
- Calibracion Valvulas Motor C12 CaterpillarDocument5 pagesCalibracion Valvulas Motor C12 CaterpillarRamón José Aponte Franco100% (9)
- Calibracion Valvulas Motor c12 CaterpillarDocument5 pagesCalibracion Valvulas Motor c12 CaterpillarOmar Diaz Segura100% (1)
- 5tech EnginDocument20 pages5tech EngintravelnammamysoreNo ratings yet
- Calibracion Valvulas C15Document4 pagesCalibracion Valvulas C15luismf14No ratings yet
- TC V1 28 enDocument40 pagesTC V1 28 enJesus Hernandez AmezcuaNo ratings yet
- GROUP C - PRDocument29 pagesGROUP C - PRrayan alnoaimiNo ratings yet
- Engine Alignment DetailsDocument13 pagesEngine Alignment DetailsNaufal HilmiNo ratings yet
- Shaft Diameter PDFDocument8 pagesShaft Diameter PDFrusruleti100% (1)
- Cat05 PDF 80-99Document20 pagesCat05 PDF 80-99Rafael ReisNo ratings yet
- ST1845 F39 X2 M35i TransmissionDocument22 pagesST1845 F39 X2 M35i TransmissionAS100% (3)
- Plymouth and Chrysler-built cars Complete Owner's Handbook of Repair and MaintenanceFrom EverandPlymouth and Chrysler-built cars Complete Owner's Handbook of Repair and MaintenanceNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Speed Changers, Drives & Gears World Summary: Market Values & Financials by CountryFrom EverandSpeed Changers, Drives & Gears World Summary: Market Values & Financials by CountryNo ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementFrom EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNo ratings yet
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- China Coreless IntermediateDocument21 pagesChina Coreless Intermediateraobabar21No ratings yet
- Refractory Solution FDocument5 pagesRefractory Solution Fraobabar21No ratings yet
- Bangla Steel Mill RollDocument29 pagesBangla Steel Mill Rollraobabar21No ratings yet
- Financial AnalysisDocument16 pagesFinancial Analysisraobabar21No ratings yet
- Pavingexpert - Formwork and ShutteringDocument6 pagesPavingexpert - Formwork and Shutteringraobabar21No ratings yet
- Geart Failure LubricationDocument17 pagesGeart Failure Lubricationraobabar21No ratings yet
- Texas Commission On Environmental Quality Table 11 InstructionsDocument2 pagesTexas Commission On Environmental Quality Table 11 Instructionsraobabar21No ratings yet
- Usrcontrol3 Plant Svcs Tcm9 12753Document8 pagesUsrcontrol3 Plant Svcs Tcm9 12753raobabar21No ratings yet
- Compressor ChecklistDocument5 pagesCompressor ChecklistJuanPabloAlvarezNo ratings yet
- Capital Asset and Supply Inventory Control: Management Manual Revised August 7, 2009 Title 24 Chapter HDocument14 pagesCapital Asset and Supply Inventory Control: Management Manual Revised August 7, 2009 Title 24 Chapter Hraobabar21No ratings yet
- MSS SP-115 (1999)Document11 pagesMSS SP-115 (1999)raobabar21No ratings yet
- Trainer API NDT Welding Qaqc Aws Asme Sixsigma Iso Softskill Profile Vedagiri Umashankar Chennai India 9600162099Document2 pagesTrainer API NDT Welding Qaqc Aws Asme Sixsigma Iso Softskill Profile Vedagiri Umashankar Chennai India 9600162099raobabar21No ratings yet
- Agma 9002-A86 Inch Bore and Ansi b17.1Document6 pagesAgma 9002-A86 Inch Bore and Ansi b17.1k21p81100% (2)
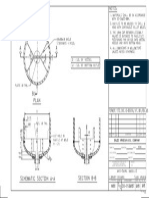
- Notes:: D I.D. of Vessel D I.D. of Bottom OutletDocument1 pageNotes:: D I.D. of Vessel D I.D. of Bottom Outletraobabar21No ratings yet
- 95000401Document1 page95000401raobabar21No ratings yet
- Design Notes: 001 D M88 DB-950009 00Document1 pageDesign Notes: 001 D M88 DB-950009 00raobabar21No ratings yet
- Rad 1/2 D: 001 C/D M88 DB-950006 00Document1 pageRad 1/2 D: 001 C/D M88 DB-950006 00raobabar21No ratings yet