You might also like
- Boletín Técnico 01 - 2013 Restablecer El Indicador de Servicio - Xcross Nice Tigo QQ311 QQ6 YoyaDocument6 pagesBoletín Técnico 01 - 2013 Restablecer El Indicador de Servicio - Xcross Nice Tigo QQ311 QQ6 YoyaJarden VegaNo ratings yet
- Qué es el sensor TPS y cómo funcionaDocument5 pagesQué es el sensor TPS y cómo funcionaFerdinand Mamani marquez100% (1)
- Funcionamiento y Diagnóstico de Redes MultiplexadasDocument7 pagesFuncionamiento y Diagnóstico de Redes MultiplexadasalejandroNo ratings yet
- PRUEBA NoDocument6 pagesPRUEBA NoLuis SantiagoNo ratings yet
- Manual+en+Español (K5 9100西班牙语)Document6 pagesManual+en+Español (K5 9100西班牙语)Jose C. MurilloNo ratings yet
- Bujías - Principios básicos y componentesDocument21 pagesBujías - Principios básicos y componentesbryan columbaNo ratings yet
- Articulo Emulador LambdaDocument5 pagesArticulo Emulador LambdaAnderson Ayala JacomeNo ratings yet
- Sensor de Detonaciòn ExposicionDocument11 pagesSensor de Detonaciòn ExposicionVictorJeanSmithNo ratings yet
- Banqueo ECU Toyota 4EDocument11 pagesBanqueo ECU Toyota 4ELuis TarquiNo ratings yet
- Cuerpo de Aceleración Electrónico FiatDocument5 pagesCuerpo de Aceleración Electrónico FiatRamon Azuaje100% (1)
- Inyeccion 05Document0 pagesInyeccion 05gonzalo210No ratings yet
- Codigos de DefinicionesDocument30 pagesCodigos de DefinicionesNicolasToroArdilesNo ratings yet
- Analisis Inyec. EEC IVDocument33 pagesAnalisis Inyec. EEC IVtecnistaNo ratings yet
- Diagnostico Automotriz 2013Document44 pagesDiagnostico Automotriz 2013Ing Mec Ind Bravo0% (1)
- Probador Portatil de Bobinas, Modulos y SensoresDocument1 pageProbador Portatil de Bobinas, Modulos y SensoresProbadorAutomotrizNo ratings yet
- DTCS y MasDocument55 pagesDTCS y MasOscar Villaseñor100% (1)
- Probador Jap m03Document1 pageProbador Jap m03ProbadorAutomotrizNo ratings yet
- Cuales Son Los Componentes Del Conector Obd IIDocument29 pagesCuales Son Los Componentes Del Conector Obd IIFreddy Chimbo100% (1)
- P0016 Posicion de Cigueñal Del Arbol de Leva Toyota FortunnerDocument2 pagesP0016 Posicion de Cigueñal Del Arbol de Leva Toyota FortunnerJuan Bautista Parra MarquezNo ratings yet
- Regulación de ralenti inestable en Alfa Romeo 145/146Document17 pagesRegulación de ralenti inestable en Alfa Romeo 145/146Alfredo Cachopo100% (1)
- Motor 1.3L Endura E - Manual de servicio completoDocument121 pagesMotor 1.3L Endura E - Manual de servicio completoDaniel Manzano Ejecutivo Patrimonial100% (1)
- Manual Probador de MariposaDocument12 pagesManual Probador de MariposaarielfoxtoolsNo ratings yet
- Acelerador ElectrónicoDocument12 pagesAcelerador ElectrónicoDo Lc50% (2)
- Fall As RenaultDocument46 pagesFall As RenaultMati BerlincourtNo ratings yet
- Monitores Sistema EGR PDFDocument5 pagesMonitores Sistema EGR PDFarnaldo huelNo ratings yet
- Tipos de Fallas en ComputadorasDocument25 pagesTipos de Fallas en ComputadorasGaspar Vivier100% (1)
- Pinout Diagramas PCM 112 PinesDocument33 pagesPinout Diagramas PCM 112 PinesAuto Repair solo fuel inyeccionNo ratings yet
- Cuerpo de Mariposa MotorizadoDocument13 pagesCuerpo de Mariposa MotorizadoLIMBERTOLEDONo ratings yet
- MCC para circuitos de sensores de dos y tres terminalesDocument13 pagesMCC para circuitos de sensores de dos y tres terminalescarlos rincon100% (1)
- 2 Power Point CURSO DE AIRBAG Y PRETENSORESDocument52 pages2 Power Point CURSO DE AIRBAG Y PRETENSORESffNo ratings yet
- Ford PCMControlledChargingSystem SPANISHDocument4 pagesFord PCMControlledChargingSystem SPANISHWilliam MoronNo ratings yet
- Función y lectura del sensor ECT o CTS de temperatura del motorDocument8 pagesFunción y lectura del sensor ECT o CTS de temperatura del motorCato del RioNo ratings yet
- Catalogo Herramientas Raven PDFDocument76 pagesCatalogo Herramientas Raven PDFAbelardo Pina0% (2)
- PCM Módulo de Control Del Tren de Potencia EXPONERDocument4 pagesPCM Módulo de Control Del Tren de Potencia EXPONERSoledad KaryNo ratings yet
- Funcionamiento Del Sensor MafDocument11 pagesFuncionamiento Del Sensor MafluisNo ratings yet
- Ubicación Del Sensor de Oxígeno Ó Sensor LambdaDocument2 pagesUbicación Del Sensor de Oxígeno Ó Sensor Lambdametanirvana100% (1)
- Funciones y Conexiones de ReguladorDocument4 pagesFunciones y Conexiones de Reguladormaria cedeñoNo ratings yet
- Programación OPEL V5.1 con CJ4 LADocument28 pagesProgramación OPEL V5.1 con CJ4 LAJackson VivasNo ratings yet
- Tabla de SensoresDocument4 pagesTabla de SensoresErick Santiago MNo ratings yet
- Iac SensorDocument10 pagesIac SensorEduardo Valenzuela100% (1)
- Causas y soluciones de averías en el sistema de admisión variableDocument10 pagesCausas y soluciones de averías en el sistema de admisión variableMta MotorsportNo ratings yet
- Sensores Del AutomoilDocument9 pagesSensores Del Automoildiego fandiñoNo ratings yet
- Trucos de Autodiagnostico Ford FocusDocument6 pagesTrucos de Autodiagnostico Ford FocusrockensysaNo ratings yet
- Excelente Analisis de EncendidoDocument132 pagesExcelente Analisis de Encendidowilliam_senati20057051100% (2)
- CODIGO DE FALLAS Obd2Document3 pagesCODIGO DE FALLAS Obd2tayconsNo ratings yet
- Nissan Sentra Service Manual - Cadena de Distribución - Desmontaje e Instalación - Motor Mecánico - MotorDocument26 pagesNissan Sentra Service Manual - Cadena de Distribución - Desmontaje e Instalación - Motor Mecánico - MotorYdelkadiasmela DominguezmorelNo ratings yet
- Sensor MAF CaracteristicasDocument1 pageSensor MAF CaracteristicasRicky SantiagoNo ratings yet
- Cuerpos de Aceleracion y Pedales ElectronicosDocument46 pagesCuerpos de Aceleracion y Pedales ElectronicosDENIS MARCELO UGEÑO GUILCAPI50% (2)
- Manual Probador de Encendido-Japm03Document71 pagesManual Probador de Encendido-Japm03Carlos EscobarNo ratings yet
- ChevystarDocument16 pagesChevystargdelgadocNo ratings yet
- 1699inst - TRF Premium-ClioDocument8 pages1699inst - TRF Premium-ClioCarlos Castillo100% (1)
- Sistema de Seguridad Pasivo EcoSport y Fiesta 2005Document17 pagesSistema de Seguridad Pasivo EcoSport y Fiesta 2005Ivan Alex EscobarNo ratings yet
- Diagnóstico Eléctrico en 6 Pasos - Parte 1 - Encendido ElectronicoDocument4 pagesDiagnóstico Eléctrico en 6 Pasos - Parte 1 - Encendido ElectronicocjtrybiecNo ratings yet
- Sistema Con Control de Presion Por Medio de FRPDocument16 pagesSistema Con Control de Presion Por Medio de FRPClaudhe GT100% (1)
- Diagnóstico a Bordo OBDDocument37 pagesDiagnóstico a Bordo OBDIrving Andrade Chigo100% (1)
- Manual Probador Multiple Pm-2005Document28 pagesManual Probador Multiple Pm-2005Julio QuilarqueNo ratings yet
- Bobinas de EncendidoDocument17 pagesBobinas de EncendidoAndrés Edisson ÁguilaNo ratings yet
- Automóviles Y Accesorios: Los Pequeños Dispositivos Que Personalizan El Lujo...From EverandAutomóviles Y Accesorios: Los Pequeños Dispositivos Que Personalizan El Lujo...No ratings yet
- Manual Multipexado GM PDFDocument37 pagesManual Multipexado GM PDFluis riveraNo ratings yet
- Manual Multipexado GMDocument37 pagesManual Multipexado GMCarlos Villalobos Vega100% (1)
- Formación Renault sistema llave sin llaveDocument18 pagesFormación Renault sistema llave sin llaveAndrésMartínNo ratings yet
- Nueva Gama de Motores de Gasolina EA211Document66 pagesNueva Gama de Motores de Gasolina EA211AndrésMartínNo ratings yet
- Manual Cuerpos Aceleración PDFDocument6 pagesManual Cuerpos Aceleración PDFmomv9100% (1)
- Inmovilizador y Simbolos PDFDocument14 pagesInmovilizador y Simbolos PDFAndrésMartínNo ratings yet
- Inmovilizador y Simbolos PDFDocument14 pagesInmovilizador y Simbolos PDFAndrésMartínNo ratings yet
- Manual Sistemas Energia Bosch Alternador Generacion Corriente Componentes Rotor Motor Arranque Esquema Electrico PDFDocument24 pagesManual Sistemas Energia Bosch Alternador Generacion Corriente Componentes Rotor Motor Arranque Esquema Electrico PDFManuel SotoNo ratings yet
- Alternadores - Controlados Por La EcuDocument38 pagesAlternadores - Controlados Por La EcuWilliam Moron100% (3)
- Como Pilotar en RallyDocument9 pagesComo Pilotar en RallyAndrésMartínNo ratings yet
- Bomba de VacioDocument20 pagesBomba de VacioPepe Souto Tubio100% (1)
- Moto E5 Play - Verizon.ug - Es US - ssc8C29420 B - WebDocument36 pagesMoto E5 Play - Verizon.ug - Es US - ssc8C29420 B - WebJhon Carlos Lozada MonsalveNo ratings yet
- Colector de escape y admisión diferidaDocument27 pagesColector de escape y admisión diferidaPablo VarelaNo ratings yet
- Manual Lovato GNVDocument65 pagesManual Lovato GNVSebastiam Garay100% (5)
- Bobinas PDFDocument24 pagesBobinas PDFSantos J Mamani ArgolloNo ratings yet
- Manual Inyectores DieselDocument31 pagesManual Inyectores DieselAndrésMartín83% (6)
- Manual Sistemas Iluminacion Electricidad Automotriz Tecnologias Faros Luces Led Xenon Senalizacion Asistencia NormativaDocument84 pagesManual Sistemas Iluminacion Electricidad Automotriz Tecnologias Faros Luces Led Xenon Senalizacion Asistencia NormativaAndrésMartínNo ratings yet
- Metodologia PBIDocument4 pagesMetodologia PBIAndrésMartínNo ratings yet
- Diagnostico y Fallas Del Cuerpo de Aceleracion ElectronicoDocument9 pagesDiagnostico y Fallas Del Cuerpo de Aceleracion Electronicoarturo_gilson91% (11)
- Meorar El Rendimiento de Ubuntu 1204Document2 pagesMeorar El Rendimiento de Ubuntu 1204AndrésMartínNo ratings yet
- Meorar El Rendimiento de Ubuntu 1204Document2 pagesMeorar El Rendimiento de Ubuntu 1204AndrésMartínNo ratings yet
- Manual FocusexeDocument192 pagesManual FocusexejavierrequenaNo ratings yet
- Lg-E411 Arg Ug 130718Document116 pagesLg-E411 Arg Ug 130718AndrésMartínNo ratings yet
- VPN GNS3Document29 pagesVPN GNS3ygallego73No ratings yet
- Practica 1Document6 pagesPractica 1Andy NavasNo ratings yet
- Idirect Instalacion Clientes 2018 DefDocument35 pagesIdirect Instalacion Clientes 2018 DefVladimir0307No ratings yet
- 4.3.3.4 Lab - Configure HSRPDocument8 pages4.3.3.4 Lab - Configure HSRPROBINSON PRADO VILLEGASNo ratings yet
- Practica 4 CodesysDocument4 pagesPractica 4 Codesysjmolina500No ratings yet
- Capitulo 11 CcnaDocument50 pagesCapitulo 11 Ccnajulian duranNo ratings yet
- Curso Senati 01Document68 pagesCurso Senati 01Carlos Orlando Claros VásquezNo ratings yet
- QoS en Cisco Practica#2Document12 pagesQoS en Cisco Practica#2wilberNo ratings yet
- 4.3.3.4 Lab - Configure HSRPDocument8 pages4.3.3.4 Lab - Configure HSRPJUAN ANTONIO LOPEZ SANCHEZNo ratings yet
- Lab 3.2.4.4Document5 pagesLab 3.2.4.4Maicol PereaNo ratings yet
- Comandos básicos de red: ping, tracert, ipconfigDocument5 pagesComandos básicos de red: ping, tracert, ipconfigLuis Montuto MoraNo ratings yet
- Cuestionario 6Document4 pagesCuestionario 6Ana De La CerdaNo ratings yet
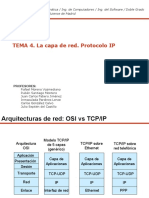
- Tema 4Document77 pagesTema 4Alberto100% (1)
- Manual de Tester Camaras - IPC TesterDocument139 pagesManual de Tester Camaras - IPC TesterromelNo ratings yet
- Diapositivas Capítulo 17Document59 pagesDiapositivas Capítulo 17bryan mezaNo ratings yet
- Android HackingDocument16 pagesAndroid Hackingsofia romero100% (2)
- ATP Red y MVDocument9 pagesATP Red y MVCarlos MejiasNo ratings yet
- Guia Protocolo Arp Rdc115Document3 pagesGuia Protocolo Arp Rdc115Milton EspinozaNo ratings yet
- Actividad 2 Cisco Packet TraicerDocument3 pagesActividad 2 Cisco Packet TraicerLuis Alejandro CARDENAS VARGASNo ratings yet
- Laboratorio NmapDocument5 pagesLaboratorio NmapArphiaCoaCmdNo ratings yet
- Cisco ASADocument15 pagesCisco ASARandolf DuranNo ratings yet
- Actividad de Taller #1Document18 pagesActividad de Taller #1subesolNo ratings yet
- Ejercicios Tema 4 ResueltosDocument9 pagesEjercicios Tema 4 ResueltosAntonio MontoyaNo ratings yet
- Amanecer en La Red-Karen MontesDocument11 pagesAmanecer en La Red-Karen Montessamy31No ratings yet
- Laboratorio 1 - Practica Identificacion RedDocument10 pagesLaboratorio 1 - Practica Identificacion Redオチョア フランクNo ratings yet
- Practica4 Protocolo IPDocument7 pagesPractica4 Protocolo IPCarlos Eduardo GarciaNo ratings yet
- Documento SnortDocument12 pagesDocumento SnortEmanuel PadillaNo ratings yet
- Comandos MSDocument7 pagesComandos MSlili1816No ratings yet
- CCNA 1 v6.0 Introduction to Networks Final Exam Answers 2017 (Examen 1 - Opción ADocument10 pagesCCNA 1 v6.0 Introduction to Networks Final Exam Answers 2017 (Examen 1 - Opción AjcomartinezNo ratings yet
- L 14 - If-Procedimientos y MaterialesDocument2 pagesL 14 - If-Procedimientos y MaterialesŠaúl ÇønðøríNo ratings yet