You might also like
- Performance Analysis of A Trellis Coded Beamforming Scheme For MIMO Fading ChannelsDocument4 pagesPerformance Analysis of A Trellis Coded Beamforming Scheme For MIMO Fading ChannelsMihai ManeaNo ratings yet
- MIMO-Rake Receiver in WCDMADocument8 pagesMIMO-Rake Receiver in WCDMALê Minh NguyễnNo ratings yet
- A Wideband Radio Channel Model For Simulation of Chaotic Communication SystemsDocument5 pagesA Wideband Radio Channel Model For Simulation of Chaotic Communication SystemskmcbestNo ratings yet
- Adaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelDocument5 pagesAdaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelV'nod Rathode BNo ratings yet
- S-38.220 Licentiate Course On Signal Processing in Communications, FALL - 97Document15 pagesS-38.220 Licentiate Course On Signal Processing in Communications, FALL - 97Shabeeb Ali OruvangaraNo ratings yet
- Ref 19Document11 pagesRef 19Sandeep SunkariNo ratings yet
- Multiple Input Multiple Output Channel Model For Simulation of and - Diversity Wireless SystemsDocument7 pagesMultiple Input Multiple Output Channel Model For Simulation of and - Diversity Wireless Systemsbajrang bansalNo ratings yet
- I. Berenguer Is Supported by A Fulbright FellowshipDocument25 pagesI. Berenguer Is Supported by A Fulbright FellowshipPraveen DhawanNo ratings yet
- Uwb PDFDocument5 pagesUwb PDFHinduja IcchapuramNo ratings yet
- Different Transmitters and ReceiversDocument22 pagesDifferent Transmitters and ReceiversAved CNo ratings yet
- MIMO Systems and Channel Models ProposalDocument11 pagesMIMO Systems and Channel Models ProposalAhmed HwaidiNo ratings yet
- Training Sequence Assisted Channel Estimation For Mimo Ofdm: Sumei Sun, Ingo Wiemer, C. K. Ho, and T. T. TjhungDocument6 pagesTraining Sequence Assisted Channel Estimation For Mimo Ofdm: Sumei Sun, Ingo Wiemer, C. K. Ho, and T. T. TjhungSandeep SunkariNo ratings yet
- Mimo Generalized Decorrelating Discrete-Time Rake Receiver: Tunc Er Baykas, Mohamed Siala, Abbas Yongac o GluDocument4 pagesMimo Generalized Decorrelating Discrete-Time Rake Receiver: Tunc Er Baykas, Mohamed Siala, Abbas Yongac o Glubavar88No ratings yet
- 3D Non-Stationary 5G Channel ModelDocument14 pages3D Non-Stationary 5G Channel ModelNAVYAPALETINo ratings yet
- 2 DS-CDMA With MRC: U U I I IDocument5 pages2 DS-CDMA With MRC: U U I I INasir KhanNo ratings yet
- Analysis of Return-To-Zero-On-Off-Keying Over Absolute Polar Duty Cycle Division Multiplexing in Dispersive Transmission MediumDocument10 pagesAnalysis of Return-To-Zero-On-Off-Keying Over Absolute Polar Duty Cycle Division Multiplexing in Dispersive Transmission MediumvipkaushikNo ratings yet
- On Carrier Spacing in Multicarrier CDMA Systems: LetterDocument4 pagesOn Carrier Spacing in Multicarrier CDMA Systems: Letterjavier_ivan91No ratings yet
- Adaptive Regularized Zero-Forcing Beamforming in MDocument14 pagesAdaptive Regularized Zero-Forcing Beamforming in MkiranpatruduNo ratings yet
- Signal Detection For 3GPP LTE Downlink: Algorithm and ImplementationDocument14 pagesSignal Detection For 3GPP LTE Downlink: Algorithm and ImplementationThanh HoangNo ratings yet
- Spacetime Signal Processing For Wireless Communications A SurveyDocument4 pagesSpacetime Signal Processing For Wireless Communications A Surveyradhika myadari1814No ratings yet
- Spread Spectrum Ultrasonic Positioning SystemDocument6 pagesSpread Spectrum Ultrasonic Positioning SystemTuấn DũngNo ratings yet
- Cdma Sparse Channel Estimation Using A Gsicam Algorithm For RadiDocument5 pagesCdma Sparse Channel Estimation Using A Gsicam Algorithm For Radiradha gulatiNo ratings yet
- TG10 2Document5 pagesTG10 2m0hmdNo ratings yet
- Eigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelDocument7 pagesEigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelKrishna Ram BudhathokiNo ratings yet
- Overspread Digital Transmission Over Wireless Linear Time-Varying MIMO SystemsDocument13 pagesOverspread Digital Transmission Over Wireless Linear Time-Varying MIMO SystemsRaghavendra Prasad ReddyNo ratings yet
- Logus broadband wireless solutions exploredDocument31 pagesLogus broadband wireless solutions exploredNabeel JarralNo ratings yet
- Enhanced Mobile Digital Video Broadcasting With Distributed Space-Time CodingDocument5 pagesEnhanced Mobile Digital Video Broadcasting With Distributed Space-Time Codingabyss2000No ratings yet
- Robustness of DS-CDMA Multiuser Detectors: Pål Orten and Tony OttossonDocument5 pagesRobustness of DS-CDMA Multiuser Detectors: Pål Orten and Tony OttossonEmraan ShaikhNo ratings yet
- Adaptive Channel Estimation for Underwater MIMO OFDMDocument6 pagesAdaptive Channel Estimation for Underwater MIMO OFDMDHBKHNDT6No ratings yet
- 1202 1552 PDFDocument16 pages1202 1552 PDFarpitmatlabNo ratings yet
- Iterative Multiuser Detection Vigoda SummaryDocument18 pagesIterative Multiuser Detection Vigoda SummaryMohammed Fatehy SolimanNo ratings yet
- Mobile Communications HandbookDocument11 pagesMobile Communications HandbookSai RamNo ratings yet
- On Timing Offset and Frequency Offset Estimation in LTE UplinkDocument10 pagesOn Timing Offset and Frequency Offset Estimation in LTE UplinkAjay SharmaNo ratings yet
- Performance Improvement of Mc-Cdma System Through DSTBC Site DiversityDocument8 pagesPerformance Improvement of Mc-Cdma System Through DSTBC Site Diversityمحمد الطراونهNo ratings yet
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversDocument5 pagesPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalNo ratings yet
- MIMO-OFDM Channel Estimation Based On Subspace Tracking: Jianxuan Du and Ye (Geoffrey) LiDocument5 pagesMIMO-OFDM Channel Estimation Based On Subspace Tracking: Jianxuan Du and Ye (Geoffrey) LiRutuja ShedsaleNo ratings yet
- Performance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersDocument5 pagesPerformance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersMasterArvinNo ratings yet
- Complex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír WieserDocument6 pagesComplex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír Wiesergzb012No ratings yet
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDocument4 pagesMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXNizar Ben Hadj YahiaNo ratings yet
- Low Complexity Channel Estimation For 3GPP LTE Downlink MIMO OFDM SystemsDocument4 pagesLow Complexity Channel Estimation For 3GPP LTE Downlink MIMO OFDM Systemsshantz109No ratings yet
- Sukh 04560087 SukhDocument7 pagesSukh 04560087 SukhmalhiavtarsinghNo ratings yet
- Performance Comparison of Wavelet Packet Modulation and OFDM Over Multipath Wireless Channel With Narrowband InterferenceDocument4 pagesPerformance Comparison of Wavelet Packet Modulation and OFDM Over Multipath Wireless Channel With Narrowband Interferencesachin10dulkarNo ratings yet
- Propagacion en Comunicaciones MovilesDocument24 pagesPropagacion en Comunicaciones MovilesJuan Gerardo HernandezNo ratings yet
- Performance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariDocument4 pagesPerformance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariNung NingNo ratings yet
- A Simple Channel Simulator For Multiuser MIMO Broadcast Channel SystemsDocument6 pagesA Simple Channel Simulator For Multiuser MIMO Broadcast Channel SystemsskynetoNo ratings yet
- Introduction To MIMO SystemsDocument8 pagesIntroduction To MIMO SystemsnataliiadesiiNo ratings yet
- Coherence Time and Sparsity of Brazilian Outdoor PLC Channels A Preliminary AnalysisDocument5 pagesCoherence Time and Sparsity of Brazilian Outdoor PLC Channels A Preliminary AnalysisSalman Wajib KhanNo ratings yet
- Diversity and Multiplexing Techniques of 802.11n WLAN: Maciej KrasickiDocument5 pagesDiversity and Multiplexing Techniques of 802.11n WLAN: Maciej Krasickizizo1921No ratings yet
- Cortes Mimo STBC MatlabDocument8 pagesCortes Mimo STBC MatlabLuna MoonfangNo ratings yet
- Rainbow Link Beamforming Technology and Relevant AnalysisDocument10 pagesRainbow Link Beamforming Technology and Relevant Analysislovedxxxg520No ratings yet
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDocument4 pagesMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXkhanziaNo ratings yet
- Complex Variational Mode Decomposition For Signal ProcessingDocument11 pagesComplex Variational Mode Decomposition For Signal Processing0902au11mt14No ratings yet
- A Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystemDocument6 pagesA Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystempreetiNo ratings yet
- Layered Space-Time Codes For Wireless Communications Using Multiple Transmit AntennasDocument5 pagesLayered Space-Time Codes For Wireless Communications Using Multiple Transmit AntennasAnonymous hDKqasfNo ratings yet
- Performance Analysis of MIMO-OFDM Systems On Nakagami-M Fading ChannelsDocument5 pagesPerformance Analysis of MIMO-OFDM Systems On Nakagami-M Fading ChannelsmnoppNo ratings yet
- v1 CoveredDocument16 pagesv1 CoveredRahul Chauhan M.Tech., Electronics Engineering, IIT(BHU)No ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Pharmaceutical Stability The Science and RegulationsDocument32 pagesPharmaceutical Stability The Science and RegulationsMostofa Rubal100% (1)
- Second Travel of Rizal: Week 8 Unit 3Document22 pagesSecond Travel of Rizal: Week 8 Unit 3John Russell GasangNo ratings yet
- My Personal TimelineDocument4 pagesMy Personal TimelineJerlando M. Pojadas Jr.67% (3)
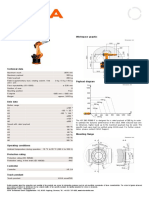
- KR 280 R3080 F technical specificationsDocument1 pageKR 280 R3080 F technical specificationsDorobantu CatalinNo ratings yet
- Position Paper For The Art Controversy "Poleteismo" of Mideo CruzDocument2 pagesPosition Paper For The Art Controversy "Poleteismo" of Mideo CruzAalayah Gwendel Wayne CarumbaNo ratings yet
- m5 Mage The AscensionDocument20 pagesm5 Mage The AscensionQuentin Agnes0% (1)
- Business Model Canvas TemplateDocument5 pagesBusiness Model Canvas TemplateAsraihan Raihan100% (1)
- On The Art of Fighting - A Humanist Translation of Fiore Dei Liberi's Flower of Battle Owned by Leonello D'EsteDocument37 pagesOn The Art of Fighting - A Humanist Translation of Fiore Dei Liberi's Flower of Battle Owned by Leonello D'EsteHunterSJNo ratings yet
- Environmental, Health and Safety Guidelines For Textiles ManufacturingDocument20 pagesEnvironmental, Health and Safety Guidelines For Textiles ManufacturingHitesh ShahNo ratings yet
- Stress Management Towards Employees in Reliance Life Insurance SureshDocument90 pagesStress Management Towards Employees in Reliance Life Insurance SureshSuresh Babu Reddy100% (3)
- A Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and OpportunitiesDocument14 pagesA Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and Opportunitiesاسامة نعمة جبارNo ratings yet
- Wma11 01 Que 20221011Document28 pagesWma11 01 Que 20221011Maks LubasNo ratings yet
- Power Over Ethernet - Wikipedia, The Free EncyclopediaDocument7 pagesPower Over Ethernet - Wikipedia, The Free EncyclopediaManitNo ratings yet
- RAF Bomber Command March 1943Document4 pagesRAF Bomber Command March 1943catracho84No ratings yet
- The Right Help at The Right Time: MatterDocument24 pagesThe Right Help at The Right Time: MattermariustudoracheNo ratings yet
- English Team Agenda 2023-2024Document4 pagesEnglish Team Agenda 2023-2024api-604869051No ratings yet
- Lamb To The Slaughter EssayDocument5 pagesLamb To The Slaughter Essaypflhujbaf100% (2)
- PreceptronDocument17 pagesPreceptroneng_kmmNo ratings yet
- Set 177Document599 pagesSet 177adilfarooq25No ratings yet
- Arduino Mario Bros Tunes With Piezo Buzzer and PWMDocument6 pagesArduino Mario Bros Tunes With Piezo Buzzer and PWMClaudia GrijalvaNo ratings yet
- VELMATIC Well Service Air ValveDocument2 pagesVELMATIC Well Service Air Valvecarlos37No ratings yet
- Questions Scope PDFDocument10 pagesQuestions Scope PDFabdou madjidNo ratings yet
- Presentation - On SVAMITVADocument18 pagesPresentation - On SVAMITVAPraveen PrajapatiNo ratings yet
- THICKWALL CYLINDERS AND PRESS FITSDocument10 pagesTHICKWALL CYLINDERS AND PRESS FITSankitaNo ratings yet
- Logging Levels in Log4j - Tutorialspoint ExamplesDocument3 pagesLogging Levels in Log4j - Tutorialspoint ExamplesJai PannuNo ratings yet
- GCMS-QP2010 User'sGuide (Ver2.5) PDFDocument402 pagesGCMS-QP2010 User'sGuide (Ver2.5) PDFnguyenvietanhbtNo ratings yet
- HZVDocument6 pagesHZVnurrozaqNo ratings yet
- Flat Slab NoteDocument4 pagesFlat Slab NotesasiNo ratings yet
- The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6. The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6Document1 pageThe Next Questions Will Depend On Your Answer(s) in Question Number 4: 6. The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6cgranzore8833% (3)
- Marketing Strategies Audit On Hewlett Packard (HP)Document19 pagesMarketing Strategies Audit On Hewlett Packard (HP)auraNo ratings yet