You might also like
- CloroDocument23 pagesCloropol_aliagaNo ratings yet
- DUREZADocument12 pagesDUREZApol_aliagaNo ratings yet
- Memoria Descriptiva de Los Sistemas de Agua Potable y Alcantarillado PDFDocument4 pagesMemoria Descriptiva de Los Sistemas de Agua Potable y Alcantarillado PDFpol_aliagaNo ratings yet
- Tubería de AceroDocument10 pagesTubería de Aceropol_aliagaNo ratings yet
- Análisis de Estabilidad Dinámica No Lineal de Una SCDocument27 pagesAnálisis de Estabilidad Dinámica No Lineal de Una SCpol_aliagaNo ratings yet
- Caso DHL PortugalDocument6 pagesCaso DHL Portugalpol_aliagaNo ratings yet
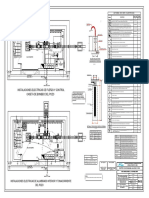
- Caseta de Bombeo Del Pozo Instalaciones Electricas de Fuerza Y ControlDocument1 pageCaseta de Bombeo Del Pozo Instalaciones Electricas de Fuerza Y ControlMarcoCalleDelgadoNo ratings yet
- 3era Practica - FluidosDocument2 pages3era Practica - Fluidospol_aliagaNo ratings yet
- Sistemas de Ecuaciones y Tipos de SolucionDocument8 pagesSistemas de Ecuaciones y Tipos de SolucionJuan MonttNo ratings yet
- Taller pc3 CalculoDocument3 pagesTaller pc3 CalculoStefan MeddleNo ratings yet
- LIbro - Geological Structures and Maps - Lisle-2004 - TRADUCIDODocument116 pagesLIbro - Geological Structures and Maps - Lisle-2004 - TRADUCIDOBerson Pallani IhueNo ratings yet
- Dibujo Industrial Manual de Apoyo y Docencia PDFDocument153 pagesDibujo Industrial Manual de Apoyo y Docencia PDFrodolfoNo ratings yet
- Capítulo 6 Estabilidad Transversal A Grandes ÁngulosDocument32 pagesCapítulo 6 Estabilidad Transversal A Grandes ÁngulosJUNIOR OLIVONo ratings yet
- Trazo GradienteDocument5 pagesTrazo GradientehenryNo ratings yet
- Estatica Tema6Document15 pagesEstatica Tema6antonioNo ratings yet
- Sistema Diédrico. Paralelismo y Perpendicularidad.: 4.1. Rectas Paralelas. Paralelismo Entre Dos Rectas de PerfilDocument10 pagesSistema Diédrico. Paralelismo y Perpendicularidad.: 4.1. Rectas Paralelas. Paralelismo Entre Dos Rectas de Perfilmanuel bolivarNo ratings yet
- Taller 02Document2 pagesTaller 02OscarAlejandro AulesNo ratings yet
- Informe de Geometria DescriptivaDocument20 pagesInforme de Geometria DescriptivaCRISTHIAN YUPANQUI REYSANCHEZ100% (1)
- 2344 8350 Cient 37 58scieloDocument9 pages2344 8350 Cient 37 58scieloNahomiNo ratings yet
- Tercer Taller MultiDocument18 pagesTercer Taller MultiAngie MorenoNo ratings yet
- SOLIDWORKS BASICO - Manual PDFDocument156 pagesSOLIDWORKS BASICO - Manual PDFUlises Martín Urbina GradosNo ratings yet
- GE-08E-25 (P - La Recta II) PT - C1-C2Document4 pagesGE-08E-25 (P - La Recta II) PT - C1-C2José Carlos Julca SilvaNo ratings yet
- Algebra Lineal Cap 1, 2 y 3Document194 pagesAlgebra Lineal Cap 1, 2 y 3Luis Brayan Alejo67% (3)
- Final Calculo 2 2013-1 (Solucionario)Document6 pagesFinal Calculo 2 2013-1 (Solucionario)Maya PintoNo ratings yet
- Subtema 1.1.2 Metodos CuantitativosDocument47 pagesSubtema 1.1.2 Metodos CuantitativosMiguel Ángel Angulo Pérez100% (1)
- Inforne Labo 2Document77 pagesInforne Labo 2carmenNo ratings yet
- 100000I03N IntroduccionALaMatematicaParaIngenieriaDocument6 pages100000I03N IntroduccionALaMatematicaParaIngenieriaMichael Gomez HNo ratings yet
- Geometria 2018Document238 pagesGeometria 2018Juan Carlos Llave Rodriguez71% (7)
- Capítulo 05 InterseccionesDocument124 pagesCapítulo 05 InterseccionesRenzoNo ratings yet
- Tarea 2 Sistema de Ecuaciones GeogebraDocument10 pagesTarea 2 Sistema de Ecuaciones GeogebraDaniela Parra MejiaNo ratings yet
- Iprint Convert TMP - TMPDocument5 pagesIprint Convert TMP - TMPKevin Nicolás Cadenas espinosaNo ratings yet
- DibujosDocument13 pagesDibujosOzelillo CafelilloNo ratings yet
- Ejercicios Resueltos U-1-1Document46 pagesEjercicios Resueltos U-1-1Maria Lorena GuerendiainNo ratings yet
- MGAN1 U4 ContenidoDocument52 pagesMGAN1 U4 ContenidoLuis LlanesNo ratings yet
- 04 Rastreo Recorte 1Document84 pages04 Rastreo Recorte 1Sasuke SojanNo ratings yet
- Trazo de CanalesDocument31 pagesTrazo de Canalesluisabanto1995No ratings yet
- Consolidacion TeoriaDocument79 pagesConsolidacion TeoriaAnonymous 4toshpLNo ratings yet
- Práctica 2 Electrónica II 21ADocument8 pagesPráctica 2 Electrónica II 21ABryan Iza EspinosaNo ratings yet