You might also like
- Introducción A Los Controladores PIDDocument24 pagesIntroducción A Los Controladores PIDVictor ReyesNo ratings yet
- Características del sistema de control en cascada para motores de corriente continuaDocument3 pagesCaracterísticas del sistema de control en cascada para motores de corriente continuaRoland CaixaNo ratings yet
- Diseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCDocument10 pagesDiseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCOscar Dario Cristancho SaboyaNo ratings yet
- Sistemas de Control Enfoque de Proyecto PDFDocument667 pagesSistemas de Control Enfoque de Proyecto PDFAlvaro RamirezNo ratings yet
- Control Digital Taller 1Document3 pagesControl Digital Taller 1Omar David Peña IbarraNo ratings yet
- PreparatorioDocument5 pagesPreparatorioAntonio TobarNo ratings yet
- PIDDocument9 pagesPIDMaria Monica Rodriguez BeltranNo ratings yet
- Diseño e Implementación de Un Controlador Pid Análogo para Un Motor UniversalDocument7 pagesDiseño e Implementación de Un Controlador Pid Análogo para Un Motor Universalhhryc7No ratings yet
- Proyecto Final Control de Motor PIDDocument15 pagesProyecto Final Control de Motor PIDeduardo hernandezNo ratings yet
- Ejercicios PotenciaDocument15 pagesEjercicios PotenciaTania TorresNo ratings yet
- 14 y 15 Analisis Del Controlador PID y Repaso LGR BODEDocument85 pages14 y 15 Analisis Del Controlador PID y Repaso LGR BODEMIJAELNo ratings yet
- Control de Un Servomecanismo Con Motor DCDocument5 pagesControl de Un Servomecanismo Con Motor DCAlex Jr SullnNo ratings yet
- Fundamentos de Control de Procesos Industriales .PDF Control - IDocument17 pagesFundamentos de Control de Procesos Industriales .PDF Control - IRonaldo PirloNo ratings yet
- Informe ProyectoDocument6 pagesInforme ProyectoJorge ZambranoNo ratings yet
- Introduccion Al Control Robusto Español PDFDocument34 pagesIntroduccion Al Control Robusto Español PDFFrancisco GomezNo ratings yet
- Sistemas de Tanques Independientes Control MultivariableDocument13 pagesSistemas de Tanques Independientes Control MultivariableByron Paul CajamarcaNo ratings yet
- P1IIEPNDocument5 pagesP1IIEPNDavid OrtegaNo ratings yet
- Ejercicios de electrónica de potencia en microrred autónomaDocument6 pagesEjercicios de electrónica de potencia en microrred autónomaRicardo BarrionuevoNo ratings yet
- Diseño Logico Secuencial Con VHDLDocument43 pagesDiseño Logico Secuencial Con VHDLENIC-AITCG100% (1)
- Control Predictivo y Cascada en Ingeniería de SistemasDocument32 pagesControl Predictivo y Cascada en Ingeniería de SistemasGeraldine Burgos GonzalesNo ratings yet
- Comunicación Rs232 (VHDL)Document13 pagesComunicación Rs232 (VHDL)Jose Ignacio Fajardo AguirreNo ratings yet
- Respuesta Al Escalon de Sistemas de 2º OrdenDocument15 pagesRespuesta Al Escalon de Sistemas de 2º OrdenAmanda LarsonNo ratings yet
- Práctica #7 - Automatización IndustrialDocument6 pagesPráctica #7 - Automatización IndustrialKEvinLalanGui100% (1)
- Informe Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFDocument5 pagesInforme Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFMiguel Angel GomezNo ratings yet
- Práctica TIA Portal-FluidSiM PDFDocument4 pagesPráctica TIA Portal-FluidSiM PDFAlyan ZaeNo ratings yet
- Tema 1Document7 pagesTema 1acamargowNo ratings yet
- Convertidores analógicos y digitales: tipos, características y usosDocument4 pagesConvertidores analógicos y digitales: tipos, características y usosAlber Lim GboNo ratings yet
- Informe Control Robusto II - NewDocument21 pagesInforme Control Robusto II - NewCarmen Rosa Amau Quispe0% (1)
- Control Pid para La Velocidad de Un Motor DCDocument4 pagesControl Pid para La Velocidad de Un Motor DCBrayan HiddNo ratings yet
- Banda Transportadora ClasificadoraDocument2 pagesBanda Transportadora ClasificadoraXavier ReibánNo ratings yet
- Control de Velocidad de Un Motor DCDocument14 pagesControl de Velocidad de Un Motor DCDionel Castro100% (2)
- Cuadro Comparativo VictorDocument4 pagesCuadro Comparativo VictorJesPricilaNo ratings yet
- Informe Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Document20 pagesInforme Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Victorino VillamizarNo ratings yet
- Resumen Deber 11Document50 pagesResumen Deber 11Jhonatan de MoraNo ratings yet
- Unit 2 - Clasificacion Por Estructura PLCDocument26 pagesUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNo ratings yet
- Informe Del LABORATORIODocument14 pagesInforme Del LABORATORIObyo_sdq1284No ratings yet
- Configuraciones del Timer 555Document7 pagesConfiguraciones del Timer 555Jorge RodriguezNo ratings yet
- El Esquema Del Control P Es El SiguienteDocument3 pagesEl Esquema Del Control P Es El SiguienteYudi NatumiNo ratings yet
- Control de Un Motor DC Mediante Realimentación de EstadosDocument2 pagesControl de Un Motor DC Mediante Realimentación de EstadosAndres AndradeNo ratings yet
- SEP Laboratorio 1Document67 pagesSEP Laboratorio 1miguelNo ratings yet
- Tarea 4 Control DigitalDocument6 pagesTarea 4 Control DigitalAldo CarrilloNo ratings yet
- Proyecto Final de ControlDocument6 pagesProyecto Final de ControlAndres FelipeNo ratings yet
- Marco Teórico Convertidor Buck BoostDocument6 pagesMarco Teórico Convertidor Buck BoostWalter Tarmeño NoriegaNo ratings yet
- Sistemas Continuos PDFDocument25 pagesSistemas Continuos PDFGuyumusNo ratings yet
- Problemario Estabilidad Segúnda ParteDocument18 pagesProblemario Estabilidad Segúnda ParteCarlos Uriel Martinez TinocoNo ratings yet
- 4Document14 pages4Rosvit De la CruzNo ratings yet
- Informe Proyecto Convertidor Sepic Con Control de Potencia en La EntradaDocument6 pagesInforme Proyecto Convertidor Sepic Con Control de Potencia en La EntradaRicardo Montes RomeroNo ratings yet
- Multimetro Digital Con Pic 16F877A - Libros, Simuladores, Tutoriales Y Mucho MásDocument9 pagesMultimetro Digital Con Pic 16F877A - Libros, Simuladores, Tutoriales Y Mucho MásArmando Campos SalazarNo ratings yet
- Guia de Triac DiacDocument6 pagesGuia de Triac DiacAlejandro MtzNo ratings yet
- Rectificador Monofasico Controlado de Onda CompletaDocument13 pagesRectificador Monofasico Controlado de Onda CompletaCompu VoipNo ratings yet
- Informe de laboratorio de control: Controlador PID de temperatura didácticoDocument8 pagesInforme de laboratorio de control: Controlador PID de temperatura didácticoJose CoronacionNo ratings yet
- Laboratorio 1 Control DigitalDocument9 pagesLaboratorio 1 Control DigitalCM35No ratings yet
- Filtros activos de primer y segundo ordenDocument7 pagesFiltros activos de primer y segundo ordenYerson Yair CifuentesNo ratings yet
- Exposicion de Segunda UnidadDocument19 pagesExposicion de Segunda UnidadrenzoNo ratings yet
- Laboratorio 5Document4 pagesLaboratorio 5Carlos Carrillo ZapataNo ratings yet
- Unid4 Sem13Document40 pagesUnid4 Sem13Diego OmarNo ratings yet
- Control Pid y Su Aplicacion AutomatizacionDocument45 pagesControl Pid y Su Aplicacion AutomatizacionMilton IngaNo ratings yet
- Informe #1 de Control de Procesos (Terminado)Document16 pagesInforme #1 de Control de Procesos (Terminado)Alex RuizNo ratings yet
- Diseño y ajuste de controladores PID con reglas de Ziegler-NicholsDocument22 pagesDiseño y ajuste de controladores PID con reglas de Ziegler-Nicholssandro95No ratings yet
- Control PI PD PID Ingeniería IndustrialDocument7 pagesControl PI PD PID Ingeniería IndustrialJce Svu100% (2)
- Daniela RivadeneiraS8EXTDocument10 pagesDaniela RivadeneiraS8EXTdaniela rivadeneiraNo ratings yet
- Rúbrica para Informe de Trabajo Final de Estadística DescriptivaDocument2 pagesRúbrica para Informe de Trabajo Final de Estadística DescriptivaEsther MariaNo ratings yet
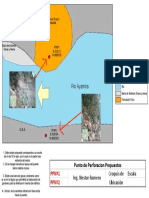
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDocument1 pageFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalNo ratings yet
- Matriz de Análisis de Riesgo Laboral en Unaempresa AzucareraDocument11 pagesMatriz de Análisis de Riesgo Laboral en Unaempresa AzucareraWillyNo ratings yet
- Informe de Pago y Cobro Sin ConclusionesDocument7 pagesInforme de Pago y Cobro Sin ConclusionesMaria Lizeth Burga ÑiqueNo ratings yet
- Triptico Importancia Al ClienteDocument2 pagesTriptico Importancia Al ClienteFrank Jeffrey Pillpe RiverosNo ratings yet
- R.M. 116-2022-Vivienda Ugm UltimoDocument3 pagesR.M. 116-2022-Vivienda Ugm UltimoIsabel Huarca CruzNo ratings yet
- Auto Diagnostico AlpinaDocument20 pagesAuto Diagnostico AlpinaDavid Rojas Alvarez0% (1)
- Precios unitarios de obras de infraestructura hidráulicaDocument282 pagesPrecios unitarios de obras de infraestructura hidráulicaDiego Dionicio Rodríguez González100% (1)
- Perfil de Proyecto R.tomasM Horno de InduccionE.Document51 pagesPerfil de Proyecto R.tomasM Horno de InduccionE.Reynaldo Franz Ajata ChNo ratings yet
- La Maquina de VaporDocument2 pagesLa Maquina de Vaportutoria2c100% (1)
- Challenger 2011Document413 pagesChallenger 2011Punto de PruebasNo ratings yet
- Masp MantenimientoDocument28 pagesMasp MantenimientoSergio SabaNo ratings yet
- Generación y Depuracion de IdeasDocument1 pageGeneración y Depuracion de IdeasFernando ZuñigaNo ratings yet
- Reglamento 4-27 Sustancias Quimicas Controladas en VoladurasDocument46 pagesReglamento 4-27 Sustancias Quimicas Controladas en VoladurasJose Noel Herrera RodriguezNo ratings yet
- Economía en Un DíaDocument17 pagesEconomía en Un DíaLaura Daniela MartinezNo ratings yet
- Matriz de Riesgos SocratesDocument31 pagesMatriz de Riesgos SocratesLuciana PalacioNo ratings yet
- Tesis Ley de MaquilasDocument210 pagesTesis Ley de Maquilasrpazos79No ratings yet
- MuseopradoDocument2 pagesMuseopradoEdward GómezNo ratings yet
- Diseno Hidraulico Obras de Toma 125-215-1-SMDocument8 pagesDiseno Hidraulico Obras de Toma 125-215-1-SMEmmanuel MejiaNo ratings yet
- Matriz de Consistencia-VariablesDocument3 pagesMatriz de Consistencia-VariablesClaudia Ñique RuminóNo ratings yet
- Desarrollo y Validación de Un Método AnalíticoDocument13 pagesDesarrollo y Validación de Un Método AnalíticoFrankchéscoly EspinozaNo ratings yet
- Postweld Heat Treatment (PWHT)Document2 pagesPostweld Heat Treatment (PWHT)Freddy Lagua PerezNo ratings yet
- Modelo de Un Solo PeriodoDocument7 pagesModelo de Un Solo PeriodokikeNo ratings yet
- Charla Integral SSIMA 421 Manejo Defensivo en Condiciones Climatológicas AdversasDocument2 pagesCharla Integral SSIMA 421 Manejo Defensivo en Condiciones Climatológicas AdversasWalterLiviasNo ratings yet
- Plan Covid - Flat Up 213 PDFDocument30 pagesPlan Covid - Flat Up 213 PDFJorch Comunidad DE Ingenieros DEL PerúNo ratings yet
- SimuladoresDocument4 pagesSimuladoresYahana Villatoro HernandezNo ratings yet
- Diapositivas Motores de Fondo, Perforacion DireccionalDocument21 pagesDiapositivas Motores de Fondo, Perforacion Direccionalangelitoeldiablito100% (2)
- Comandos Linux Sistema Archivos UsuariosDocument1 pageComandos Linux Sistema Archivos UsuariosGeovanny CudcoNo ratings yet
- Definir un nicho: la clave del éxito empresarialDocument5 pagesDefinir un nicho: la clave del éxito empresarialValentina MezaNo ratings yet