You might also like
- Selective Jamming/Dropping Insider Attacks in Wireless Mesh NetworksDocument6 pagesSelective Jamming/Dropping Insider Attacks in Wireless Mesh Networksmindworkz proNo ratings yet
- Software Requirements Specifications Document: System DescriptionDocument5 pagesSoftware Requirements Specifications Document: System Descriptionmindworkz proNo ratings yet
- Prediction of Vehicles' Trajecto-Ries Based On Driver Behaviour ModelDocument76 pagesPrediction of Vehicles' Trajecto-Ries Based On Driver Behaviour Modelmindworkz proNo ratings yet
- Selfish Jammer Detection in Multiple P2P Communication NetworksDocument7 pagesSelfish Jammer Detection in Multiple P2P Communication Networksmindworkz proNo ratings yet
- Large Scale Data Collection of Tattoo-Based Biometric Data From Social-Media WebsitesDocument4 pagesLarge Scale Data Collection of Tattoo-Based Biometric Data From Social-Media Websitesmindworkz proNo ratings yet
- NEW Optimal Resource Allocation in Wirelessly Powered Communication Networks With User CooperationDocument14 pagesNEW Optimal Resource Allocation in Wirelessly Powered Communication Networks With User Cooperationmindworkz proNo ratings yet
- An Intelligent Reflective Colour Sensor System For Paper and Textile IndustriesDocument5 pagesAn Intelligent Reflective Colour Sensor System For Paper and Textile Industriesmindworkz proNo ratings yet
- Augmenting Data When Training A CNN For Retinal Vessel Segmentation: How To Warp?Document4 pagesAugmenting Data When Training A CNN For Retinal Vessel Segmentation: How To Warp?mindworkz proNo ratings yet
- Linear Precoding For Multiuser Visible-Light Communication With Field-of-View DiversityDocument9 pagesLinear Precoding For Multiuser Visible-Light Communication With Field-of-View Diversitymindworkz proNo ratings yet
- NO Paper / Year Method/tool Concept ApplicationDocument2 pagesNO Paper / Year Method/tool Concept Applicationmindworkz proNo ratings yet
- Figure 1. Schematic Overview of Classification of Time Series Gene ExpressionDocument1 pageFigure 1. Schematic Overview of Classification of Time Series Gene Expressionmindworkz proNo ratings yet
- Presented By: Kunal Jain (071309) Under The Guidance of Mr. Praveen Kumar Tripathi Dept of CSE & IT (JUIT)Document23 pagesPresented By: Kunal Jain (071309) Under The Guidance of Mr. Praveen Kumar Tripathi Dept of CSE & IT (JUIT)mindworkz proNo ratings yet
- Smart Vehicle Security System For Defending Against Collabrative Attacks by MalwareDocument5 pagesSmart Vehicle Security System For Defending Against Collabrative Attacks by Malwaremindworkz proNo ratings yet
- Wood 2017Document8 pagesWood 2017mindworkz pro100% (1)
- Oxvwhulqj0Rghori&Orxg&Hqwhuviru%Lj'Dwd 3urfhvvlqj: 0/Nkdlor.O/Pdvk 1D) Du3HohkDocument4 pagesOxvwhulqj0Rghori&Orxg&Hqwhuviru%Lj'Dwd 3urfhvvlqj: 0/Nkdlor.O/Pdvk 1D) Du3Hohkmindworkz proNo ratings yet
- A Survey On Deep Learning For Big Data 2018 Information FusionDocument12 pagesA Survey On Deep Learning For Big Data 2018 Information Fusionmindworkz proNo ratings yet
- Online Anomaly Detection Using Non-Parametric Technique For Big Data Streams in Cloud Collaborative EnvironmentDocument6 pagesOnline Anomaly Detection Using Non-Parametric Technique For Big Data Streams in Cloud Collaborative Environmentmindworkz proNo ratings yet
- 3.2.2 Arduino UnoDocument8 pages3.2.2 Arduino Unomindworkz proNo ratings yet
- Author Year Title Methodology Advantage DisadvantageDocument3 pagesAuthor Year Title Methodology Advantage Disadvantagemindworkz proNo ratings yet
- LSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data SystemsDocument9 pagesLSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data Systemsmindworkz proNo ratings yet
- Riit EeeDocument2 pagesRiit Eeemindworkz proNo ratings yet
- 2017-2018 Software Ieee Final Year Project TitlesDocument2 pages2017-2018 Software Ieee Final Year Project Titlesmindworkz proNo ratings yet
- Acknowledgement: Rev - Fr.Dr.J.E. Arul Raj, The Corner Stone of This Institution For All Efforts andDocument1 pageAcknowledgement: Rev - Fr.Dr.J.E. Arul Raj, The Corner Stone of This Institution For All Efforts andmindworkz proNo ratings yet
- NV-Dedup: High-Performance Inline Deduplication For Non-Volatile MemoryDocument14 pagesNV-Dedup: High-Performance Inline Deduplication For Non-Volatile Memorymindworkz proNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Catalogdetails 34Document55 pagesCatalogdetails 34vishal singhalNo ratings yet
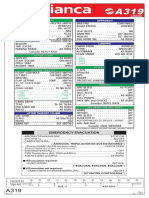
- Checklist A319 AvaDocument2 pagesChecklist A319 Avaeduard queensNo ratings yet
- Tractor 2017 Catalogue WebDocument36 pagesTractor 2017 Catalogue WebAnonymous 1XBCMX100% (1)
- 911 GT3 CupDocument25 pages911 GT3 Cupjlee_296737No ratings yet
- Air Bag Restraint SystemDocument79 pagesAir Bag Restraint Systemjvazquez501No ratings yet
- 501-05 Interior Trimming Panel and Trimming PICKUP JMCDocument14 pages501-05 Interior Trimming Panel and Trimming PICKUP JMCRusonegroNo ratings yet
- DTC VWDocument10 pagesDTC VWChano LucianoNo ratings yet
- Range Rover Classic Workshop ManualDocument767 pagesRange Rover Classic Workshop Manualrange-rover94% (18)
- Drivers & Operators Awareness Training: Project: Sky Venture Project, Location: Yas Island-Abudhabi-UaeDocument34 pagesDrivers & Operators Awareness Training: Project: Sky Venture Project, Location: Yas Island-Abudhabi-UaeSaifuddin AhmedNo ratings yet
- Fix - MB Actros 2546 AKF - Jan 2014Document13 pagesFix - MB Actros 2546 AKF - Jan 2014Rudi Kurniawan100% (1)
- 12 Ud2000 PDFDocument4 pages12 Ud2000 PDFIGNACIONo ratings yet
- Usermanual gw2Document6 pagesUsermanual gw2Sgly ZemogNo ratings yet
- A330 PneumaticDocument27 pagesA330 PneumaticTienek Lee100% (1)
- Module 5 AnswersDocument2 pagesModule 5 Answerssathish kumarNo ratings yet
- GDIDocument30 pagesGDIMartinchemNo ratings yet
- Assembly Guide: PART NO. 4038572 8000 SRM 1535Document32 pagesAssembly Guide: PART NO. 4038572 8000 SRM 1535Dat0% (1)
- WA380 7 BrochureDocument24 pagesWA380 7 BrochureAvaa Amgaa100% (1)
- Mercedes Actros MP3 1 1Document9 pagesMercedes Actros MP3 1 1عبدالرحمن وعمر وشمس عبداللهNo ratings yet
- Toyota Land Cruiser 80 (RHD) Vehicle Security System TVSS IIIB Installation InstructionsDocument35 pagesToyota Land Cruiser 80 (RHD) Vehicle Security System TVSS IIIB Installation InstructionsBen TranceNo ratings yet
- FJS-727 SeriesChecklistandProceduresManualDocument67 pagesFJS-727 SeriesChecklistandProceduresManualDave91No ratings yet
- 6100 SYN-NERGY 5W-40 en FR Motul 15910 20220504Document4 pages6100 SYN-NERGY 5W-40 en FR Motul 15910 20220504Manuel HelmfeltNo ratings yet
- XDE200技术规格书Document24 pagesXDE200技术规格书abangNo ratings yet
- Mahindra Manual S.N Plant Number Break Down Time Defective Items Part Number PR PR Date PO Po Date Supplier QTYDocument10 pagesMahindra Manual S.N Plant Number Break Down Time Defective Items Part Number PR PR Date PO Po Date Supplier QTYkaswade BrianNo ratings yet
- Brake System PDFDocument24 pagesBrake System PDFMario AguirreNo ratings yet
- Delivery ReceiptDocument1 pageDelivery ReceiptLalit DagarNo ratings yet
- CWS Forestry Power GrappleDocument2 pagesCWS Forestry Power GrappleCWS Industries0% (1)
- Geely 7DCT TransmissionDocument4 pagesGeely 7DCT Transmissionsebaa taha amineNo ratings yet
- Porsche 928 1986 Wire DiagramDocument39 pagesPorsche 928 1986 Wire DiagramOscar HamerNo ratings yet
- FTR TEST REPORT OF MAHINDRA 605 DI I Aug 2020Document57 pagesFTR TEST REPORT OF MAHINDRA 605 DI I Aug 2020Mekh MitraNo ratings yet
- Wa380-7 Venss04200 1212 PDFDocument24 pagesWa380-7 Venss04200 1212 PDFRicardo SanzanaNo ratings yet