You might also like
- Mantenimiento de redes multiplexadas. TMVG0209From EverandMantenimiento de redes multiplexadas. TMVG0209Rating: 5 out of 5 stars5/5 (1)
- BusCAN Protocolo SAE J1939Document47 pagesBusCAN Protocolo SAE J1939Mario Alberto Abarca Rodriguez100% (5)
- Detección y compensación de irregularidades de inyecciónFrom EverandDetección y compensación de irregularidades de inyecciónNo ratings yet
- BusCAN Protocolo SAE J1939Document18 pagesBusCAN Protocolo SAE J1939George Guerrero100% (3)
- Sistema de Comunicacion CAN BUSDocument34 pagesSistema de Comunicacion CAN BUSManolo Castillo100% (1)
- Diagnóstico de Redes CAN BUS Parte1Document7 pagesDiagnóstico de Redes CAN BUS Parte1Gerardo100% (4)
- Sacania Can BusDocument40 pagesSacania Can BusFelix Rafael Alvarado100% (5)
- CanbusDocument36 pagesCanbusEduardo Cruz100% (3)
- CAN BUS Introducción A Los Sistemas de Comunicación Del VehículoDocument33 pagesCAN BUS Introducción A Los Sistemas de Comunicación Del Vehículogdelgadoc82% (11)
- CanBus CanOpenDocument38 pagesCanBus CanOpenLuis Alonso Garcia TachoNo ratings yet
- CAN Bus - SAE J1939 SinucDocument21 pagesCAN Bus - SAE J1939 SinucMauro100% (2)
- CAN BUS ProtocoloDocument35 pagesCAN BUS ProtocoloBj BenitezNo ratings yet
- Curso WinolsDocument3 pagesCurso Winolsloky monsaNo ratings yet
- Can Bus - Sae j1939 SinucDocument21 pagesCan Bus - Sae j1939 SinucEnrique Esquinca100% (1)
- Comunicación J1939Document2 pagesComunicación J1939Belen Castillon0% (1)
- MULTIPLEXADODocument89 pagesMULTIPLEXADOCristhian MoralesNo ratings yet
- SensoresAutomotrices - Airee AcondicionadoDocument74 pagesSensoresAutomotrices - Airee AcondicionadoEitan VAN Muller100% (1)
- Averías CAN-Bus ConfortDocument27 pagesAverías CAN-Bus ConfortLuis PerezNo ratings yet
- Multiplexado Redes Can BusDocument4 pagesMultiplexado Redes Can BusJason DaNny FloResNo ratings yet
- Diagnosticar Un Red CANDocument10 pagesDiagnosticar Un Red CANLopez Maciel100% (2)
- 3-Descripción, Construcción y Función-Sinopsis de Electrónica de Vehículo, Descripción Del SistemaDocument19 pages3-Descripción, Construcción y Función-Sinopsis de Electrónica de Vehículo, Descripción Del SistemaDaniel Alex SánchezNo ratings yet
- CAN Bus FundamentosDocument36 pagesCAN Bus FundamentosRubén González SánchezNo ratings yet
- Dpa5 - Especificaciones PDFDocument6 pagesDpa5 - Especificaciones PDFPaul GalvezNo ratings yet
- Estructura Redes Multiplexadas PDFDocument51 pagesEstructura Redes Multiplexadas PDFMiguel ruiz100% (3)
- Protocolos de ComunicacionDocument116 pagesProtocolos de ComunicacionCarlos Quintero100% (4)
- Diagnosis CAN BUS, Paso A Paso. - Diagnosis TipsDocument18 pagesDiagnosis CAN BUS, Paso A Paso. - Diagnosis TipsAndrés Alejandro Pereira100% (3)
- Adaptador de Comunicación RP1210Document7 pagesAdaptador de Comunicación RP1210Rodrigo T. LemaNo ratings yet
- Sistema MultiplexadoDocument19 pagesSistema MultiplexadoHcosmicoNo ratings yet
- Lin BusDocument15 pagesLin BusJosue SisimithNo ratings yet
- Scope DiagnosticsDocument516 pagesScope DiagnosticsJuan Carlos Díaz Cardozo100% (4)
- Can BusDocument56 pagesCan BusLeidy Vernaza SalasNo ratings yet
- Novedades 20.3Document12 pagesNovedades 20.3Pedro Ruiz aguirreNo ratings yet
- Manual Canbus 2Document170 pagesManual Canbus 2Martin100% (2)
- Lista M Unidad de Mando Del MotorDocument8 pagesLista M Unidad de Mando Del Motormanu_chatNo ratings yet
- Protocolo de DiagnosticoDocument97 pagesProtocolo de DiagnosticoNelson Baez100% (4)
- Cómo Diagnosticar Un Red CAN y Qué Método EmplearDocument10 pagesCómo Diagnosticar Un Red CAN y Qué Método EmplearARAMNDO GALVAN100% (1)
- Sistemas MultiplexadosDocument16 pagesSistemas Multiplexadosgdelgadoc100% (5)
- Ecus Primer NivelDocument169 pagesEcus Primer Nivel3019030190No ratings yet
- Digitales III LIN BUSDocument22 pagesDigitales III LIN BUSGenaro Rodriguez Reyno100% (1)
- Solución Tacógrafo de Ruptela - Instrucciones de Instalación y Configuración para FM-Tco4 HCV PDFDocument14 pagesSolución Tacógrafo de Ruptela - Instrucciones de Instalación y Configuración para FM-Tco4 HCV PDFMartin ReyesNo ratings yet
- Protocolos Cummins j1939 Red de DatosDocument2 pagesProtocolos Cummins j1939 Red de DatosrobertoNo ratings yet
- Taller CanBusDocument39 pagesTaller CanBusGabriel100% (1)
- Diseño y Función. ManualDocument21 pagesDiseño y Función. ManualJuan Perez100% (1)
- Redes Multiplexadas en AutomocionDocument17 pagesRedes Multiplexadas en AutomocionAleck VieyraNo ratings yet
- Sistema de inyeccionEDC 7Document288 pagesSistema de inyeccionEDC 7rubencitomanrdp100% (1)
- Funcionamiento y Diagnóstico de Redes Multiplexadas 2 CNTDocument51 pagesFuncionamiento y Diagnóstico de Redes Multiplexadas 2 CNTJorge Antonio Guillen100% (3)
- Myslide - Es Mini-Tester PDFDocument21 pagesMyslide - Es Mini-Tester PDFRuben Dominguez Blasco100% (1)
- Teoria EcusDocument12 pagesTeoria EcusSergio CaprilesNo ratings yet
- Informe MultiplexadoDocument12 pagesInforme MultiplexadoJJ Ochoa AlvarezNo ratings yet
- Scanner Tcs CDP Delphi Autocom Autos Y CamionesDocument9 pagesScanner Tcs CDP Delphi Autocom Autos Y CamionesWalter Puca100% (1)
- Abs Nueva GeneraciónDocument21 pagesAbs Nueva GeneraciónOctavio MoralesNo ratings yet
- CaN Bus en La Maquinaria PesadaDocument29 pagesCaN Bus en La Maquinaria PesadaJuan vilchez sanchez100% (1)
- Medicion Red Can y Van MutiplexadasDocument23 pagesMedicion Red Can y Van MutiplexadasAndres Torres Cuvili100% (3)
- Curso Multiplexado CitroenDocument78 pagesCurso Multiplexado Citroenrobert100% (1)
- 2.1.2 CanDocument45 pages2.1.2 Cancr.barralesNo ratings yet
- Technologia MULTIPLEXAJEDocument22 pagesTechnologia MULTIPLEXAJEDiego Vergara PinoNo ratings yet
- 01 Can BusDocument86 pages01 Can BusJuan Efrain Mendez100% (1)
- Tecnologia CAN-BUSDocument7 pagesTecnologia CAN-BUSLUIS FERNANDO GUIJARRO MOLINANo ratings yet
- Protocolos de Comunicacion DieselDocument17 pagesProtocolos de Comunicacion Dieselnick100% (2)
- Señales Can High Can LowDocument11 pagesSeñales Can High Can LowJIMMY CHUNG PAIMA100% (1)
- Nissan d22 EditadoDocument3 pagesNissan d22 Editadoalex100% (1)
- Nissan d22Document3 pagesNissan d22alex100% (1)
- 20 Megane IiDocument49 pages20 Megane Iialex100% (4)
- Componentes Transmision PDFDocument6 pagesComponentes Transmision PDFalexNo ratings yet
- Nissan d22Document3 pagesNissan d22alex100% (1)
- Diagrama Unidad Mecatronica DSGDocument5 pagesDiagrama Unidad Mecatronica DSGalex100% (3)
- Diagrama Unidad Mecatronica DSGDocument5 pagesDiagrama Unidad Mecatronica DSGalex100% (3)
- Programacion LlavesDocument34 pagesProgramacion Llavesalex100% (1)
- Unidades de ControlDocument21 pagesUnidades de ControlalexNo ratings yet
- 33 Toyota-Hiace EditadoDocument32 pages33 Toyota-Hiace Editadoalex89% (19)
- Pinout Toyota HiaceDocument3 pagesPinout Toyota Hiacealex88% (24)
- CaribeDocument97 pagesCaribealex100% (2)
- 00 Ford ComputadorasDocument79 pages00 Ford ComputadorasalexNo ratings yet
- Tu Taller Mecanico Cuerpos de Aceleracion y Pedales ElectronicosDocument33 pagesTu Taller Mecanico Cuerpos de Aceleracion y Pedales Electronicosalex100% (1)
- Curso De-Ecus MasterDocument90 pagesCurso De-Ecus Masteralex100% (2)
- Curso de Ecus MasterDocument90 pagesCurso de Ecus Masteralex100% (2)
- Manual-Reparar Ecu 4Document77 pagesManual-Reparar Ecu 4alex100% (2)
- 11 Nissan Sentra Motor 1.8 Ecu PruebaDocument9 pages11 Nissan Sentra Motor 1.8 Ecu Pruebaalex75% (4)
- Analitico - Gastos Exp TecnicoDocument1 pageAnalitico - Gastos Exp Tecnicopedro OrtizNo ratings yet
- Interface SCADADocument12 pagesInterface SCADAIvan AlmironNo ratings yet
- Historia de Henry FordDocument11 pagesHistoria de Henry FordRufo Simón Huamán PacoriNo ratings yet
- Cuestionario Derecho Informático II ParcialDocument23 pagesCuestionario Derecho Informático II ParcialLuis OchoaNo ratings yet
- Alta Disponibilidad Con Heartbeat 150212234124 Conversion Gate02Document32 pagesAlta Disponibilidad Con Heartbeat 150212234124 Conversion Gate02rafaelantonio01No ratings yet
- U4 - Act 2 - Administración de Las Operaciones IDocument3 pagesU4 - Act 2 - Administración de Las Operaciones IBladimir RománNo ratings yet
- Digitalización de Las PymesDocument11 pagesDigitalización de Las PymesJavier Z.No ratings yet
- ALC F1 Villa Colombia Com 9 Neiva Ajustado 6-12-19 PDFDocument2 pagesALC F1 Villa Colombia Com 9 Neiva Ajustado 6-12-19 PDFCONSORCIO MARANATHANo ratings yet
- Diapositivas Idea de NegociosDocument12 pagesDiapositivas Idea de NegociosjorgeNo ratings yet
- Capacitacion Señalización VialDocument21 pagesCapacitacion Señalización VialLuis Carlos Gutierrez Pedraza100% (1)
- Interesante CVDocument3 pagesInteresante CVCristian Flores Berríos ヅNo ratings yet
- Gaamsa - Equipos - Urianalisis - U120-Ultra Acon Ficha TecnicaDocument2 pagesGaamsa - Equipos - Urianalisis - U120-Ultra Acon Ficha TecnicaOmar UbarnesNo ratings yet
- RIED. Revista Iberoamericana de Educación A Distancia 1138-2783Document6 pagesRIED. Revista Iberoamericana de Educación A Distancia 1138-2783fredys padillaNo ratings yet
- Simbolista e InstrumentaciónDocument4 pagesSimbolista e InstrumentaciónMAYCON MOISES CAJIA QUISPENo ratings yet
- Cap 4 Preguntas y ProblemasDocument13 pagesCap 4 Preguntas y ProblemasGiordano Brito RodriguezNo ratings yet
- Instalaciones SanitariasDocument24 pagesInstalaciones SanitariasRikardo Dextre Osorio100% (1)
- Modulo de BalastoDocument4 pagesModulo de BalastoJose F. HallonNo ratings yet
- Juego Didactico de Los Componentes Del PCDocument27 pagesJuego Didactico de Los Componentes Del PCMiguel Ortiz LozadaNo ratings yet
- LAB3 RAC Ytuza PumaDocument19 pagesLAB3 RAC Ytuza PumaYtuza Puma JehordanyNo ratings yet
- Meso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoDocument16 pagesMeso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoAlfredoHugoMarioCeciseNo ratings yet
- Trace ERP - Requisitos para Instalación - Ver 1.4 PDFDocument3 pagesTrace ERP - Requisitos para Instalación - Ver 1.4 PDFMca GarridoNo ratings yet
- 04 Arquitectura ISADocument21 pages04 Arquitectura ISADany MaldonadoNo ratings yet
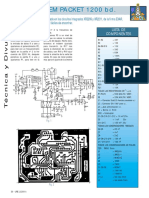
- Modem Packet 1200 BaudiosDocument2 pagesModem Packet 1200 BaudiosExperiment BarthNo ratings yet
- 10 Trucos para Acceder A Páginas Bloqueadas Desde El TrabajoDocument2 pages10 Trucos para Acceder A Páginas Bloqueadas Desde El TrabajoDjanira MezaNo ratings yet
- Phase LogDocument3 pagesPhase LogHenry Avilés ChongNo ratings yet
- Iso 21500 Grupo 4Document15 pagesIso 21500 Grupo 4Yardiry Roman Sanchez100% (1)
- TelepatologiaDocument4 pagesTelepatologiaEddy HuarachaNo ratings yet
- Bouncer (PsyBNC)Document2 pagesBouncer (PsyBNC)DoctorYerva AndresNo ratings yet
- Investigacion Power ViewDocument4 pagesInvestigacion Power ViewNancy Sastre100% (1)
- Cisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialDocument53 pagesCisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialAcceso RemotoNo ratings yet