You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Math MODULE 5,6,7: April 2013 Ninja TurtlesDocument227 pagesMath MODULE 5,6,7: April 2013 Ninja TurtlesCleo RubinoNo ratings yet
- PERC - ElectronicsDocument8 pagesPERC - ElectronicsCleo RubinoNo ratings yet
- MAC Address and MAC FilteringDocument2 pagesMAC Address and MAC FilteringCleo RubinoNo ratings yet
- Nava 2Document3 pagesNava 2Cleo RubinoNo ratings yet
- MAC Address and MAC FilteringDocument2 pagesMAC Address and MAC FilteringCleo RubinoNo ratings yet
- Compre 2BDocument3 pagesCompre 2BCleo RubinoNo ratings yet
- Date of Effectivity: 1st Sem SY 2015-2016 Date Revised: 0 Prepared By: Engr. Ramon A. Alguidano Jr. Approved By: Page 1 of 5Document5 pagesDate of Effectivity: 1st Sem SY 2015-2016 Date Revised: 0 Prepared By: Engr. Ramon A. Alguidano Jr. Approved By: Page 1 of 5Cleo RubinoNo ratings yet
- D.E. 1Document3 pagesD.E. 1Cleo RubinoNo ratings yet
- Universal Shift Registers: Experiment #8Document14 pagesUniversal Shift Registers: Experiment #8Cleo RubinoNo ratings yet
- (Um, Sorry) I'Ve Been Reincarnated! 1-47Document262 pages(Um, Sorry) I'Ve Been Reincarnated! 1-47Cleo RubinoNo ratings yet
- TV 22 2015 6 1511 1516Document6 pagesTV 22 2015 6 1511 1516Cleo RubinoNo ratings yet
- Chandigarh University Department of Electronics & Communication Engineering Assignment # 01Document6 pagesChandigarh University Department of Electronics & Communication Engineering Assignment # 01Jaspreet KaurNo ratings yet
- GP 24-21 - Fire Hazard AnalysisDocument53 pagesGP 24-21 - Fire Hazard AnalysisJohn DryNo ratings yet
- Fake ReviewDocument6 pagesFake ReviewHarshal PimpalshendeNo ratings yet
- Prime NumbersDocument2 pagesPrime NumbersDarkas2100% (1)
- Graphing Absolute Value WorksheetDocument20 pagesGraphing Absolute Value WorksheetRudyr BacolodNo ratings yet
- Model 5Document4 pagesModel 5m hNo ratings yet
- Climatic Subdivisions in Saudi Arabia: An Application of Principal Component AnalysisDocument17 pagesClimatic Subdivisions in Saudi Arabia: An Application of Principal Component AnalysisirfanNo ratings yet
- Bobine D'allumage TondeuseDocument15 pagesBobine D'allumage TondeuseThierry AvikianNo ratings yet
- Project 03 - Love-o-MeterDocument10 pagesProject 03 - Love-o-MeterHONEY MAE ROSETENo ratings yet
- Workplace Injuries - Kind of Accident (LFSINJKND)Document22 pagesWorkplace Injuries - Kind of Accident (LFSINJKND)Osman KantheNo ratings yet
- Sava Slijepcevic PH DDocument167 pagesSava Slijepcevic PH DSava SlijepčevićNo ratings yet
- Cell Transport LabDocument7 pagesCell Transport Labapi-267594083No ratings yet
- Biology June 2019 1BRDocument32 pagesBiology June 2019 1BRMohamedNo ratings yet
- Lm2596-Xxe5/F5: Cystech Electronics CorpDocument12 pagesLm2596-Xxe5/F5: Cystech Electronics Corpfabian orozNo ratings yet
- Kelvin's Minimum Energy Theorem.Document2 pagesKelvin's Minimum Energy Theorem.Ormuz SINo ratings yet
- DBMS Ctevt StudentsDocument230 pagesDBMS Ctevt StudentsDeepena PrykNo ratings yet
- Double InterlockDocument11 pagesDouble Interlocklazhar75No ratings yet
- Data SheetDocument5 pagesData SheetMindSet MarcosNo ratings yet
- HMT SKDocument60 pagesHMT SKsunilkewat11390No ratings yet
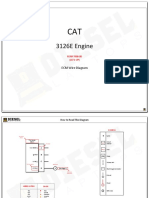
- CAT - 3126E.3126E With Prefix LEFDocument11 pagesCAT - 3126E.3126E With Prefix LEFPhil B.No ratings yet
- Seminar in Seminar in Translation Informatics. InformaticsDocument3 pagesSeminar in Seminar in Translation Informatics. InformaticsMohammed Sabri BatainehNo ratings yet
- Chapter 3-Wave Properties of ParticleDocument29 pagesChapter 3-Wave Properties of ParticleI Gowtham ChandraNo ratings yet
- Gozak - LeonidovDocument14 pagesGozak - LeonidovMartí ARNo ratings yet
- The OscilloscopeDocument6 pagesThe OscilloscoperiverajluizNo ratings yet
- Data SheetDocument3 pagesData SheetEnrique Fernando Mamani ChirinoNo ratings yet
- Final Clinical Study ReportDocument52 pagesFinal Clinical Study ReportPincheira D. FelipeNo ratings yet
- 21711c PDFDocument24 pages21711c PDFAbdessamad EladakNo ratings yet
- Giancoli - Physics Principles Appendix-2Document1 pageGiancoli - Physics Principles Appendix-2Aman KeltaNo ratings yet
- Tabel Berat Besi Per BatangDocument22 pagesTabel Berat Besi Per BatangAnonymous xYxJc53K100% (2)
- Solution Manual For University Physics 13th Edition by YoungDocument24 pagesSolution Manual For University Physics 13th Edition by YoungShellySimsqdej100% (41)