You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Eleven Steps To Success - GLOBUS StrategyDocument4 pagesEleven Steps To Success - GLOBUS StrategyMyra100% (7)
- PM-RAP-87 Rapid Concrete Mixer Brochure 2016 - Low - ResDocument24 pagesPM-RAP-87 Rapid Concrete Mixer Brochure 2016 - Low - Res113314100% (1)
- Aira Valve Manual PDFDocument116 pagesAira Valve Manual PDF113314No ratings yet
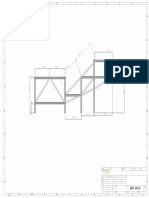
- Ash1 Struct - Sheet1Document1 pageAsh1 Struct - Sheet1113314No ratings yet
- AshrrDocument3 pagesAshrr113314No ratings yet
- High Speed Pan Mixer: For Concrete ProductionDocument2 pagesHigh Speed Pan Mixer: For Concrete Production113314No ratings yet
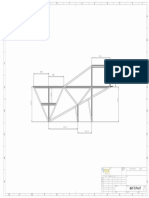
- Ash2 Struct - Sheet1 PDFDocument1 pageAsh2 Struct - Sheet1 PDF113314No ratings yet
- Ash 3 Struct - Sheet1Document1 pageAsh 3 Struct - Sheet1113314No ratings yet
- Transcript JnvuDocument2 pagesTranscript Jnvu113314No ratings yet
- Vib MotorDocument24 pagesVib Motor113314No ratings yet
- Select of Vib Motor 1Document2 pagesSelect of Vib Motor 1113314No ratings yet
- Chain Calculation PDFDocument10 pagesChain Calculation PDF113314No ratings yet
- Rajput BhupatsinhDocument4 pagesRajput Bhupatsinh113314No ratings yet
- United States Patent (19) : Keough (45) Date of Patent: Mar. 10, 1987Document11 pagesUnited States Patent (19) : Keough (45) Date of Patent: Mar. 10, 1987113314No ratings yet
- Bag House CollectionDocument12 pagesBag House Collection113314No ratings yet
- Me 601Document3 pagesMe 601113314No ratings yet
- Affidavit of StudentDocument2 pagesAffidavit of Student113314No ratings yet
- Time Table Dec-2016Document1 pageTime Table Dec-2016113314No ratings yet
- ARTS LESSON WEEK 2 DAY 1 and 2Document9 pagesARTS LESSON WEEK 2 DAY 1 and 2Roshelle MorenoNo ratings yet
- A Survey On Image Forgery Detection TechniquesDocument6 pagesA Survey On Image Forgery Detection TechniquesManjunath Manjunath SNo ratings yet
- Nyu Pick SheetDocument2 pagesNyu Pick SheetAlex LuNo ratings yet
- PTZ Series BrochureDocument20 pagesPTZ Series BrochureAny LunaNo ratings yet
- Fundamentals of PhotographyDocument29 pagesFundamentals of PhotographyAndrew Richard Thompson100% (2)
- Flexible Videoconferences That Meet Your Needs: KX-VC2000/ KX-VC1600 KX-VC1300/ KX-VC1000Document2 pagesFlexible Videoconferences That Meet Your Needs: KX-VC2000/ KX-VC1600 KX-VC1300/ KX-VC1000Birthley RagasaNo ratings yet
- Credit Digitization For Credit Management Presentation 23jul19Document21 pagesCredit Digitization For Credit Management Presentation 23jul19Chidozie Farsight100% (1)
- Forensic 1 Photography: Mr. Jonas S. GakoDocument27 pagesForensic 1 Photography: Mr. Jonas S. GakoTabaosares JeffreNo ratings yet
- Dcr-trv60 Level 2Document105 pagesDcr-trv60 Level 2Anonymous Lfgk6vygNo ratings yet
- Kodak Fuji: A Battle For Global Market ShareDocument15 pagesKodak Fuji: A Battle For Global Market ShareppNo ratings yet
- DS ImagerproX4MDocument1 pageDS ImagerproX4MAnthonio MJNo ratings yet
- Catálogo 80i BrochureDocument9 pagesCatálogo 80i BrochureluroguitaNo ratings yet
- Silver Series CatalogDocument19 pagesSilver Series CatalogVINOD RATHODNo ratings yet
- ViviCam 7330 Manual SearchDocument47 pagesViviCam 7330 Manual SearchbmmanualsNo ratings yet
- TNO-4030TR: VGA H.265 NW Radiometric Thermal CameraDocument4 pagesTNO-4030TR: VGA H.265 NW Radiometric Thermal CameraJDNo ratings yet
- Manual CamaraDocument2 pagesManual CamaraJohan Sebastián Chávez MosqueraNo ratings yet
- Arts 2nd Quarter Report 1Document25 pagesArts 2nd Quarter Report 1Zynńe CàrleyNo ratings yet
- Forensic Uses of Digital Imaging - J RussDocument205 pagesForensic Uses of Digital Imaging - J RusssamikhereNo ratings yet
- Kodak Business Fall Case StudyDocument30 pagesKodak Business Fall Case StudyBhanwar Lal BishnoiNo ratings yet
- Computer Vision NotesDocument97 pagesComputer Vision NotesNs100% (1)
- Citibank Rewards CatalogueDocument65 pagesCitibank Rewards CataloguerogsysNo ratings yet
- Photography Basics: Why Photograph?Document16 pagesPhotography Basics: Why Photograph?jaya0874No ratings yet
- BLDG STD Spec 2004Document703 pagesBLDG STD Spec 2004PcEngNo ratings yet
- AVT Cameras MARLIN F-146B / F-146CDocument2 pagesAVT Cameras MARLIN F-146B / F-146CpeterNo ratings yet
- Combined Final HND ReportDocument57 pagesCombined Final HND ReportDrew NyingiNo ratings yet
- Description:: Date: January 27, 2021Document3 pagesDescription:: Date: January 27, 2021abidNo ratings yet
- Operation Manual - Scopleimage 9.0Document33 pagesOperation Manual - Scopleimage 9.0Nabeel WarraichNo ratings yet
- Topic OutlineDocument2 pagesTopic OutlineJustine Jade Bersalona CastilloNo ratings yet