You might also like
- English 1st SemDocument34 pagesEnglish 1st SemSRUJAN KALYANNo ratings yet
- 15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RDocument54 pages15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RCharizard FreakNo ratings yet
- CG Lab InfoDocument16 pagesCG Lab InfoMohammed Adnan khanNo ratings yet
- Cad 2 MarksDocument13 pagesCad 2 MarksAnonymous JnvCyu85No ratings yet
- Final Exam CADCAMFinal 2016FinalAnswersDocument10 pagesFinal Exam CADCAMFinal 2016FinalAnswerskhalil alhatabNo ratings yet
- Cad Cam - 22.12.15-1 PDFDocument87 pagesCad Cam - 22.12.15-1 PDFGuru MaheshNo ratings yet
- Advanced Computer Aided Design: M.T: Cad / Cam - IDocument123 pagesAdvanced Computer Aided Design: M.T: Cad / Cam - IFAVAS T TNo ratings yet
- Cad/Cam Lab: Government Engineering College Jagdalpur, BASTAR (C.G.) - 494005Document17 pagesCad/Cam Lab: Government Engineering College Jagdalpur, BASTAR (C.G.) - 494005Gulshan SahuNo ratings yet
- A Survey Paper On OpenGL ESDocument4 pagesA Survey Paper On OpenGL ESEditor IJRITCCNo ratings yet
- Ractal Image Compression Using Uadtree Decomposition and Huffman CodingDocument6 pagesRactal Image Compression Using Uadtree Decomposition and Huffman CodingSylvain KamdemNo ratings yet
- Self A CH 6 7Document2 pagesSelf A CH 6 7Nomsa MwayengaNo ratings yet
- Unit - I Two Marks Question and Answer: Me6501 Computer Aided DesignDocument12 pagesUnit - I Two Marks Question and Answer: Me6501 Computer Aided DesignKamalakkannan RadhakrishnanNo ratings yet
- 7CS7 CG&MT Lab Viva QuestionDocument9 pages7CS7 CG&MT Lab Viva QuestionAshish KumawatNo ratings yet
- Graphic MidtermDocument5 pagesGraphic MidtermKhaijin LimNo ratings yet
- Cse Vi Computer Graphics and Visualization 10cs65 NotesDocument97 pagesCse Vi Computer Graphics and Visualization 10cs65 NotesDiv Dutta100% (2)
- 3D Graphics OpenGLDocument24 pages3D Graphics OpenGLmigmorNo ratings yet
- Visvesvaraya Technological University Belagavi: Computer Graphics Laboratory With Mini ProjectDocument21 pagesVisvesvaraya Technological University Belagavi: Computer Graphics Laboratory With Mini ProjectPushpakar L SNo ratings yet
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- Computer Graphics - Important Question and AnswersDocument9 pagesComputer Graphics - Important Question and AnswersR Anirudh ChelseaNo ratings yet
- Computer Graphics Questions and AnswersDocument8 pagesComputer Graphics Questions and AnswersAneeshia SasidharanNo ratings yet
- CG ManualDocument39 pagesCG Manualsanthosh reddyNo ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- Computer Graphics (CGV) SIMP 2023Document5 pagesComputer Graphics (CGV) SIMP 2023Hemamurthy 25No ratings yet
- Graphics Notes 0405Document5 pagesGraphics Notes 0405Richie BurdeosNo ratings yet
- V. S. B Engineering College, Karur - 639 111: Department of Mechanical EngineeringDocument121 pagesV. S. B Engineering College, Karur - 639 111: Department of Mechanical EngineeringvinodkumarNo ratings yet
- ME6501-Computer Aided Design PDFDocument8 pagesME6501-Computer Aided Design PDFVijay ShankarNo ratings yet
- Cad Cam Mtexam 2Document3 pagesCad Cam Mtexam 2khalil alhatabNo ratings yet
- CG Lab Manual - 18 SchemeDocument44 pagesCG Lab Manual - 18 Schemepraveen ps100% (2)
- Frequency Analysis Using Catia V5Document41 pagesFrequency Analysis Using Catia V5Vasudha Ballarapu100% (1)
- CG 15cs62 Model QP SolutionsDocument60 pagesCG 15cs62 Model QP SolutionsYasha DhiguNo ratings yet
- Cadcam Assignments PartADocument4 pagesCadcam Assignments PartAmkumar_234155No ratings yet
- For Academic Use OnlyDocument17 pagesFor Academic Use OnlyPrakhar SrivastavaNo ratings yet
- Computer Graphics Quantum-1Document246 pagesComputer Graphics Quantum-1youtenger tubeNo ratings yet
- Short Answer QuestionsDocument8 pagesShort Answer QuestionsRajyalakshmi MNo ratings yet
- Computer Graphic ReportDocument8 pagesComputer Graphic ReportAliNo ratings yet
- M.C.A. Degree Examination, 2010: Register Number: Name of The CandidateDocument2 pagesM.C.A. Degree Examination, 2010: Register Number: Name of The CandidateAbu AbdullahNo ratings yet
- Main Report CGDocument105 pagesMain Report CGAshish MorambeNo ratings yet
- CG Lab PDFDocument61 pagesCG Lab PDFanantha innanjeNo ratings yet
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionFrom EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionNo ratings yet
- CS71 - Computer Graphics 2 MarksDocument23 pagesCS71 - Computer Graphics 2 MarkspeyartheriyathuNo ratings yet
- Overview of CadDocument53 pagesOverview of CadAkash Srinivasa ReddyNo ratings yet
- Analog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionFrom EverandAnalog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionRating: 1 out of 5 stars1/5 (1)
- Overview of CAD IitDDocument17 pagesOverview of CAD IitDDineshNewalkarNo ratings yet
- CAD 2 Marks With AnswersDocument12 pagesCAD 2 Marks With AnswersSARGUNA THAMIZHANNo ratings yet
- Department of Mechanical Engineering Me6501Computer Aided Designquestion Bank Unit - I Part ADocument2 pagesDepartment of Mechanical Engineering Me6501Computer Aided Designquestion Bank Unit - I Part AChennai RajaNo ratings yet
- Adhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsDocument13 pagesAdhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsBritto RajNo ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- Two Marks - Part - 1Document14 pagesTwo Marks - Part - 1sathyaaaaa1No ratings yet
- 15AE308J - Design Lab Manual New 2020Document43 pages15AE308J - Design Lab Manual New 2020rushan ahmedNo ratings yet
- Origami-Paper Folding SimulationDocument17 pagesOrigami-Paper Folding SimulationManjunath HiremathNo ratings yet
- ServiceDocument2 pagesServicePramod GowdaNo ratings yet
- Me6501 Computer Aided Design 2 Marks With AnswersDocument12 pagesMe6501 Computer Aided Design 2 Marks With AnswersTrigger DineshNo ratings yet
- Computer Graphics (Book)Document245 pagesComputer Graphics (Book)Birjesh RathourNo ratings yet
- Unit 2Document34 pagesUnit 2sai venkatsharmaNo ratings yet
- A Realistic 2D Drawing System: Online Submission ID: 513Document8 pagesA Realistic 2D Drawing System: Online Submission ID: 513Nadeem Khan100% (1)
- Three-Dimensional Computer Graphics Architecture: Tulika Mitra and Tzi-Cker ChiuehDocument9 pagesThree-Dimensional Computer Graphics Architecture: Tulika Mitra and Tzi-Cker Chiuehpravin_bhavaleNo ratings yet
- College of Computing and Information Sciences Final Assessment Spring 2020 SemesterDocument27 pagesCollege of Computing and Information Sciences Final Assessment Spring 2020 Semestertalha khanNo ratings yet
- Processing 15shadersDocument41 pagesProcessing 15shadersWeliton De Bortoli100% (1)
- Module 3: Human Resources and Job Design: Multiple ChoiceDocument4 pagesModule 3: Human Resources and Job Design: Multiple ChoiceKamarul NizamNo ratings yet
- Organization of Production: Test IiiDocument9 pagesOrganization of Production: Test IiiKamarul NizamNo ratings yet
- MODULE 3 True and FalseDocument2 pagesMODULE 3 True and FalseKamarul NizamNo ratings yet
- Discussion Started by Group Replies Unread Last Post: Add A New TopicDocument2 pagesDiscussion Started by Group Replies Unread Last Post: Add A New TopicKamarul NizamNo ratings yet
- MODULE 2 Multiple ChoiceDocument5 pagesMODULE 2 Multiple ChoiceKamarul NizamNo ratings yet
- Assignment 3 TransitionDocument4 pagesAssignment 3 TransitionKamarul NizamNo ratings yet
- Porocity InclusionDocument4 pagesPorocity InclusionKamarul NizamNo ratings yet
- Assignment 1 CylinderDocument2 pagesAssignment 1 CylinderKamarul NizamNo ratings yet
- Assignment No 4: University of Kuala Lumpur - Malaysia France InstituteDocument3 pagesAssignment No 4: University of Kuala Lumpur - Malaysia France InstituteKamarul NizamNo ratings yet
- Weekly Partner Statement - 2018-W25Document5 pagesWeekly Partner Statement - 2018-W25Kamarul NizamNo ratings yet
- Application For GRADUATE Membership of Engineers AustraliaDocument4 pagesApplication For GRADUATE Membership of Engineers AustraliaKamarul NizamNo ratings yet
- Assignment 2 PyramidDocument1 pageAssignment 2 PyramidKamarul NizamNo ratings yet
- 4pipefitting Pressure Test 170129022549 PDFDocument13 pages4pipefitting Pressure Test 170129022549 PDFKamarul NizamNo ratings yet
- Intro2cad Cam CaeDocument29 pagesIntro2cad Cam CaeKamarul NizamNo ratings yet
- Assignments Checklist and Marks January 2014Document2 pagesAssignments Checklist and Marks January 2014Kamarul NizamNo ratings yet
- Universiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentDocument21 pagesUniversiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentKamarul NizamNo ratings yet
- Assignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGDocument2 pagesAssignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGKamarul NizamNo ratings yet
- Solutions For Questions/Problems of Chapter 5Document11 pagesSolutions For Questions/Problems of Chapter 5Kamarul NizamNo ratings yet
- Assembly ModellingDocument32 pagesAssembly ModellingKamarul NizamNo ratings yet
- Components Cad Cam CaeDocument15 pagesComponents Cad Cam CaeKamarul Nizam100% (1)
- Rev Ques AnswerDocument23 pagesRev Ques AnswerKamarul NizamNo ratings yet
- Sample Industry Internship ReportDocument3 pagesSample Industry Internship ReportKamarul NizamNo ratings yet
- 1 - IntroductionDocument10 pages1 - IntroductionKamarul NizamNo ratings yet
- Bloom's Taxonomy Indicator v3.32Document47 pagesBloom's Taxonomy Indicator v3.32Kamarul NizamNo ratings yet
- Session 1 - Smart Board Training PDFDocument2 pagesSession 1 - Smart Board Training PDFKamarul NizamNo ratings yet
- Practical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Document7 pagesPractical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Kamarul NizamNo ratings yet
- PricelistDocument2 pagesPricelistKamarul NizamNo ratings yet
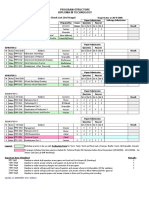
- Final Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyDocument2 pagesFinal Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyKamarul NizamNo ratings yet
- Campus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiDocument6 pagesCampus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiKamarul NizamNo ratings yet
- Memo Deadline For Submission of CourseworkDocument4 pagesMemo Deadline For Submission of CourseworkKamarul NizamNo ratings yet
- Ijicic 10 01002Document14 pagesIjicic 10 01002Hanan MouchtakiriNo ratings yet
- 9.rational Number ExamplerDocument12 pages9.rational Number ExamplerNarendra JadhavNo ratings yet
- Water Rocket ProjectDocument5 pagesWater Rocket Projectjwinfield12No ratings yet
- Midterm Review 2: Introduction To Game TheoryDocument24 pagesMidterm Review 2: Introduction To Game TheoryMuhammad AminNo ratings yet
- DRAFT - : Harvard Extension SchoolDocument8 pagesDRAFT - : Harvard Extension SchoolSanchitNo ratings yet
- Workflowsim: A Toolkit For Simulating Scientific Workflows in Distributed EnvironmentsDocument8 pagesWorkflowsim: A Toolkit For Simulating Scientific Workflows in Distributed EnvironmentsSanthosh B AcharyaNo ratings yet
- FSC For Retail Banking Point of ViewDocument2 pagesFSC For Retail Banking Point of Viewtranhieu5959No ratings yet
- Software Requirements SpecificationDocument2 pagesSoftware Requirements SpecificationYathestha Siddh100% (1)
- Web Questions UnansweredDocument13 pagesWeb Questions UnanswereddreamsftNo ratings yet
- Construction DrawingsDocument17 pagesConstruction Drawingsjacksondcpl50% (2)
- Chapter 3: Data Mining and Data VisualizationDocument51 pagesChapter 3: Data Mining and Data VisualizationSidhant GuptaNo ratings yet
- OS NotesDocument86 pagesOS Notesmyname2050No ratings yet
- Manual IQ Plus 355Document54 pagesManual IQ Plus 355willycifuentesNo ratings yet
- Yeastar TG Firmware Upgrade Guide enDocument6 pagesYeastar TG Firmware Upgrade Guide enprasetiohadiNo ratings yet
- Bpo FinalDocument10 pagesBpo FinalKenneth GoNo ratings yet
- Case Tool Lab ManualDocument13 pagesCase Tool Lab ManualDinesh SinnarasseNo ratings yet
- Microsoft FrontPageDocument14 pagesMicrosoft FrontPageSara HanifNo ratings yet
- Using Adobe Acrobat X ProDocument17 pagesUsing Adobe Acrobat X ProcadsifuNo ratings yet
- Schmidt CoDocument6 pagesSchmidt CoVirendra SabbanwarNo ratings yet
- Dbms Assignment: SolutionDocument6 pagesDbms Assignment: SolutionAkshada KaphaleNo ratings yet
- Adx PDFDocument32 pagesAdx PDFmokalppNo ratings yet
- Microsoft Windows Version HistoryDocument7 pagesMicrosoft Windows Version HistoryJohnNo ratings yet
- Using VBScript and Special Edition Using JScriptDocument1,288 pagesUsing VBScript and Special Edition Using JScriptGanapathiraju SravaniNo ratings yet
- Department of Computer Science: Notes On Interprocess Communication in UnixDocument11 pagesDepartment of Computer Science: Notes On Interprocess Communication in UnixkartikNo ratings yet
- Qodbc 2012: Odbc Driver For Quickbooks Installation GuideDocument36 pagesQodbc 2012: Odbc Driver For Quickbooks Installation Guidepravinoct1987No ratings yet
- IV Semester Course Information 2011Document66 pagesIV Semester Course Information 2011vasunewsNo ratings yet
- SAP ABAP Webdynpro TutorialDocument9 pagesSAP ABAP Webdynpro Tutorialsapabapjava2012No ratings yet
- Cutting and TailoringDocument3 pagesCutting and TailoringSHAHUL HAMEEDNo ratings yet
- Ethical and Social Issues in The Information Age PDFDocument2 pagesEthical and Social Issues in The Information Age PDFAnthony0% (2)
- Map Making With QGIS - Part IDocument2 pagesMap Making With QGIS - Part ISagar ArlekarNo ratings yet